파란색 스키복이 돋보이는 선수가 붉은색과 파란색 기문이 꽂힌 슬로프를 S자 모양으로 활강한다. 기문 사이를 몇 차례 멋지게 통과하고 마지막 기문을 향해 방향을 회전하는 순간, 중심을 잃고 쓰러져 버렸다. 한 바퀴를 구르고 폴대까지 놓친 채 널브러진 선수. 여기저기서 달려온 스태프들이 쓰러진 선수를 일으키자, 스키복 밑으로 금속 피부가 눈에 들어왔다. 로봇이었다.
“눈이 여기저기 파여 있어서 넘어지지 않고 활강하기가 쉽지 않네요. 다시 한번 해볼게요.”
정현준 한국로봇융합연구원 선임연구원은 파인 눈을 발로 다지면서 이렇게 말했다. 그는 다시 로봇 스키선수를 슬로프 위로 데려가 훈련을 재개했다.
A자로 활강하는 ‘스키로’
평창 동계올림픽 개막 직후인 2월 11~12일 이틀 동안 강원도 횡성군 웰리힐리파크에서는 세계 최초로 로봇 스키 대결이 펼쳐진다. 산업통상자원부와 한국로봇산업진흥원이 개최하는 ‘스키로봇챌린지’다. 국내 로봇 기술의 눈부신 발전 현황을 올림픽을 통해 전 세계에 알리고자 기획했다.
스키로봇챌린지는 휴머노이드(인간형 로봇)가 스키를 신고 자율주행으로 기문을 통과해 내려오는 경기다. 스키로봇챌린지에는 국내 대학과 연구소 등 8개 팀이 참가한다. 지난해 10월 말부터 12월 초까지 경기도 부천시에 있는 실내스키장에서 로봇 선수들은 맹훈련을 거듭했다.
지난해 12월 4일 부천의 실내스키장을 찾았다. 로봇 선수들의 훈련이 한창이었다. 이날 참가한 팀은 총 3개. 경북대와 미니로봇, 한국로봇융합 연구원이었다. 그간 8개 팀은 스키장이 영업을 하지않는 매주 월요일 슬로프에 모여 각자 로봇의 성능을 확인하고 개선할 점을 분석해왔다.
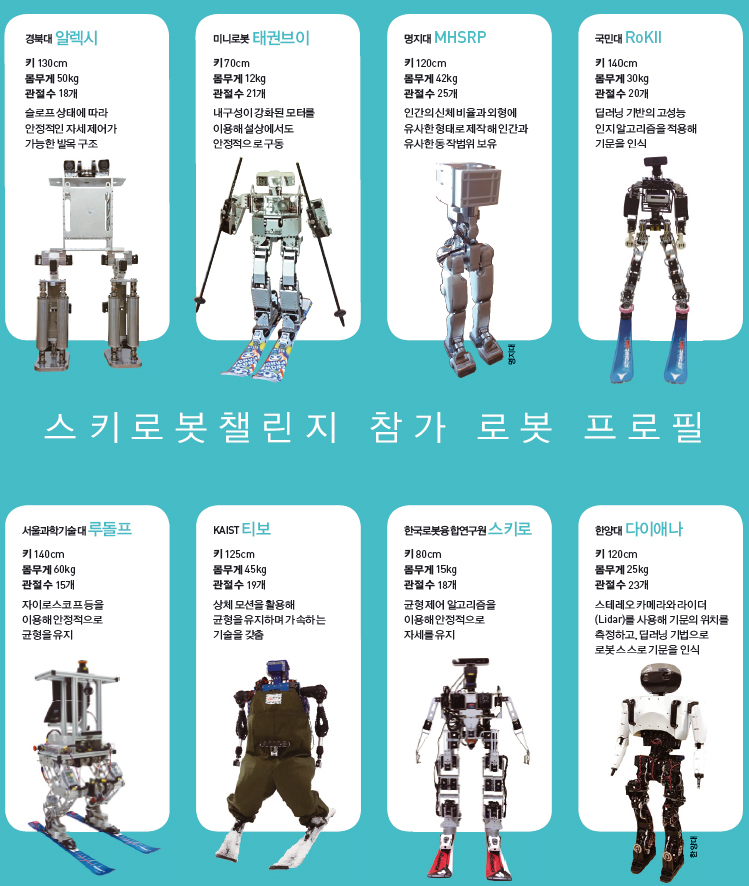
한국로봇융합연구원이 개발한 ‘스키로(SKIRO)’는 키 80cm에 몸무게 15kg로 3~4세 어린이를 모델로 삼았다. 로봇이 무거울수록 활강 속도가 빨라지지만 그만큼 방향을 바꾸기 어렵기 때문에 고민 끝에 로봇을 작고 가볍게 만드는 쪽을 택했다.

처음에는 사람처럼 발을 11자 형태로 만들어서 스키를 타게 할 계획이었다. 하지만 그런 동작을 소화하기 위해서는 로봇이 유연하게 움직일 수 있어야 하고 결국 사람만큼 많은 관절을 넣어 제작해야 했다. 빠른 속도로 내려오면서 방향을 바꿔 기문을 통과하기도 힘들었다. 기문 사이의 간격은 15m다.
스키로는 전문 스키 강사의 조언을 토대로 11자 대신 A자 모양으로 활강하는 자세를 택했다. 정 선임연구원은 “방향을 바꿔야 할 때에는 로봇이 발목을 꺾어서 한쪽 스키 날의 각도를 바꾸도록 프로그래밍했다”며 “오른쪽 발목을 꺾으면 왼쪽으로 방향을 틀고, 왼쪽 발목을 꺾으면 오른쪽으로 돈다”고 설명했다.
관건은 자율주행이다. 훈련 때는 사람이 조종할 수 있지만 실전에서는 사람이 개입할 수 없다. 오로지 자율주행 기능에 의해 슬로프를 내려와야 하기 때문에 어떻게 기문을 인식하고 스키를 제어해 기문을 통과하는 지가 중요하다. 기문은 빨간색과 파란색으로 각각 한 쌍씩 총 다섯 쌍으로 이뤄져 있으며, 가로 70cm 세로 50cm의 직사각형이다. 스키로는 ‘라이더(Lidar)’로 불리는 레이저 레이더와 카메라를 동시에 이용해서 기문을 파악하는 방법을 채택했다. 라이더는 레이저를 쏜 뒤 기문으로부터 반사돼 돌아오는 신호를 받아서 기문을 인식한다. 카메라는 색과 모양, 크기 등을 이용해서 기문을 인식한다. 정 선임연구원은 “스키로는 두 가지 방식을 동시에 쓰면서 인지가 잘 되는 쪽의 정보를 빠르게 이용해 기문을 탐지하고 스스로 동작 명령을 내린다”고 말했다.
무게 50kg 넘는 헤비급 ‘알렉시’
8개 참가팀은 저마다 다른 형태의 로봇과 전략으로 승리를 노리고 있다. 경북대 팀과 미니로봇 팀은 한국로봇융합연구원 팀과 다른 전략으로 경기를 준비 중이다.
경북대 팀의 로봇 ‘알렉시(ALEXI)’는 이날이 첫 실전 훈련이었다. 키 130cm, 무게 50kg으로 로봇스키 선수들 중에서는 두 번째로 무거운 헤비급이다. 크고 긴 기둥이 두 개씩 달린 다리가 인상적이다. 박태문 연구원은 “다리에 달린 기둥이 활강 방향을 조절하는 엑추에이터(구동기)”라고 말했다. 한쪽 다리의 구동기가 위아래로 움직이면 다른 쪽 다리와의 높이 차이가 생기면서 방향 전환이 이뤄지는 원리다.
기문 인식은 두 대의 카메라를 이용해 스테레오 시스템으로 설계했다. 사람의 눈처럼 일정한 간격을 두고 카메라를 설치한 뒤 하나의 물체(기문)에 초점을 맞추도록 설정한 시스템이다. 카메라가 동시에 기문을 촬영하면 이들 이미지는 픽셀의 위치로 변환되고, 이 정보와 이미 알고 있는 카메라 간격을 이용해 기문과 두 카메라를 꼭짓점으로 삼각형을 그린다. 삼각형의 세 변의 길이와 각을 이용해 기문의 위치와 거리를 계산한다.
이를 위해 로봇에는 컴퓨터 두 대가 달려 있다. 영상을 인식하고 처리하는 컴퓨터와, 로봇을 제어하는 컴퓨터다. 이들은 통신선으로 연결돼 서로 정보를 주고받는다. 박 연구원은 “로봇이 실시간으로 기문과의 거리를 계산하면서 적절한 위치에서 회전 명령을 내리도록 설계됐다”고 설명했다.
견고한 모터 장착한 꼬마로봇 ‘태권브이’
미니로봇은 ‘태권브이’를 들고 나왔다. 교육용 로봇 제작업체인 미니로봇은 8개 팀 중에서 유일한 기업 참가팀이다. 태권브이는 키 70cm, 몸무게 12kg으로 ‘스키로’보다 체구가 작다.
태권브이의 특징은 안정성을 강화한 모터다. 첫 실험에서는 상용 모터를 썼는데, 몇 차례 넘어지면서 모터가 고장 나자 안정성을 강화한 모터를 자체적으로 개발했다. 또 몸 전체 관절도 21개로 많은 편이라 동작의 자유도가 높다. 전영수 미니로봇 이사는 “훈련을 하면서 수차례 넘어지기를 반복했지만 지금까지 한 번도 모터의 기어가 나간 적은 없다”며 견고한 내구성을 자랑했다.
태권브이의 전략은 단순하다. 하나의 카메라만 이용해서 기문을 인식한다. 전 이사는 “스키로봇 제어는 하드웨어와 소프트웨어가 50대 50으로 중요하다”며 “하드웨어나 소프트웨어 알고리즘이 너무 복잡하면 오히려 문제가 생길 여지가 많다”고 말했다.
카메라 하나로 인식하는 만큼 기문까지의 거리는 파악되지 않는다. 하지만 미니로봇 팀은 카메라에 잡히는 기문의 크기가 거리에 따라 다르다는 점에서 아이디어를 얻었다. 가까이 있는 기문이 멀리 있는 기문보다 크기 때문에 이를 토대로 태권브이가 기문과의 거리를 상대적으로 파악하게 했다. 기문의 색상이 빨간색과 파란색으로 번갈아 나타난다는 점도 기문 인식 요소로 활용할 수 있다. 전 이사는 “카메라로 인식한 기문에 좌표를 부여한 뒤 두 기문 사이의 중심좌표를 계산해서 그 사이를 통과하는 방식”이라고 설명했다.
연구팀은 수차례 훈련하면서 얻은 데이터로 태권브이의 자율주행 기능을 최적화했다. 사람이 조종해서 기문을 통과할 때의 영상과 속도, 가속도 등의 정보를 취합한 뒤 상황에 따라 가장 적절한 동작을 찾았다. 그에 따라 최적의 정보를 태권브이에게 설정했고, 실전에서 자율주행 할 때 그에 따른 동작하게 만들었다. 전 이사는 “속도 조절이 관건”이라며 “너무 빠르면 회전을 할 때 원심력을 견디지 못하고 튕겨나갈 수 있다”고 말했다.
이날 훈련을 끝으로 참가팀들은 실내 실험을 모두 마쳤다. 여기서 발견된 문제점들을 한 달 동안 보완한 뒤 1월 대회 현장인 강원도 횡성군 웰리힐리파크에서 실전 야외 훈련을 실시했다. 로봇이 얼마나 잘 작동하는지, 영하의 추위에서 배터리에 문제는 없는지 등 추가로 보완할 부분을 점검했다. 이제 실전 경기만 남았다. 현장 관람은 무료다. 어떤 로봇이 우승을 거둘지 기대해 보자.
▼관련기사를 계속 보시려면?
[종목1] 스피드스케이팅, 0.1초 단축 위해 찰나의 순간 분석
[종목2] 스켈레톤, 세계랭킹 1위 도운 DNA 훈련법
[종목5] 컬링, ‘ 빙판 위의 체스’ 돕는 얼음 물리학
[종목6] 아이스하키, 선수 위치 실시간 분석 ‘ 언더독의 반란’ 꿈꾼다
[종목7] 스키점프, 金빛 바람 타고 더 높이 날아올라