미래형 로봇, 군집로봇의 등장
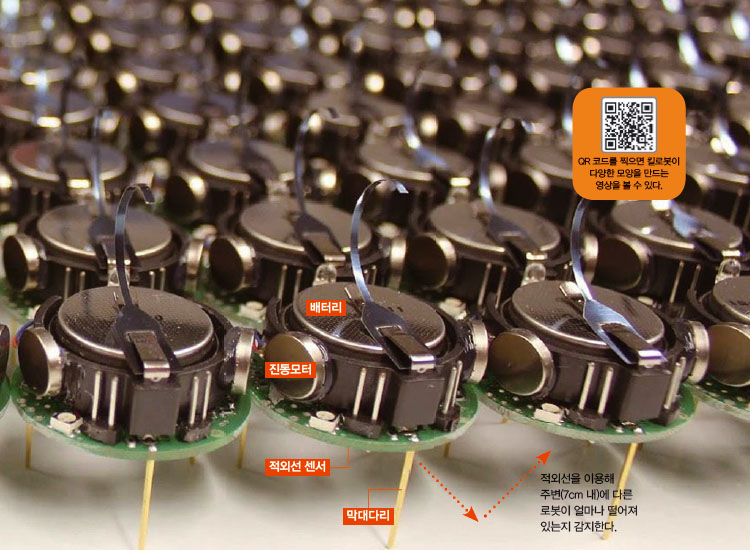
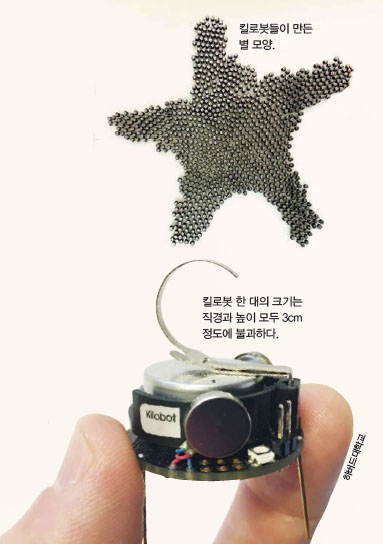
지난 2014년 미국 하버드대학교 연구팀은 ‘킬로봇(Kilobot)’이라는 작은 로봇을 만들었어요. 킬로봇은 500원짜리 동전 크기에 막대다리가 3개 달린 작은 로봇이랍니다. 다리에 관절도 없어서 진동모터가 작동하면 그 진동을 이용해 조금씩 움직이지요.
하지만 킬로봇 1000개가 모이면 사뭇 다른 모습이에요. 중앙 컴퓨터가 별 모양을 만들라고 명령하면, 1000여 대의 킬로봇들은 적외선을 이용해 다른 킬로봇이 어디에 얼마나 떨어져 있는지 인식해요. 그리곤 자신이 있어야 할 위치를 스스로 찾아가지요. 게다가 다른 로봇이 멈춰 있거나 혼잡한 상황이 발생하면 알아서 자신의 위치를 수정해 나간답니다.
곤충식 의사소통을 로봇식 의사소통으로!
이처럼 여럿이 협동해 하나의 목표를 달성하는 로봇을 ‘군집로봇’이라고 해요. 군집은 원래 한 구역에 여러 생물이 모여 있는 것을 뜻하는 단어예요. 개미나 벌 같은 생물은 여럿이 작은 힘을 모아 큰일을 해내곤 하지요. 이런 군집의 특성을 로봇에 적용한 것이 군집로봇이랍니다.
영국 링컨대학교 로봇과학자들은 개미들의 의사소통 수단인 ‘페로몬’을 모방해 군집로봇을 만들기도 했어요. 실제 개미는 암컷과 수컷이 만날 때나, 먹이를 찾기 위해 페로몬을 뿌려 의사소통을 하거든요.
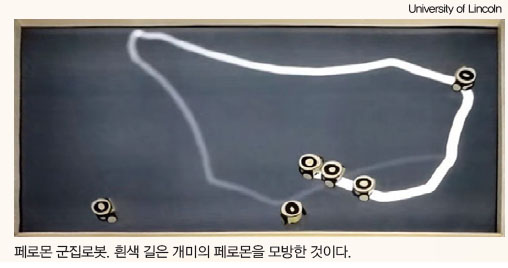
이 군집로봇은 한 대의 리더 로봇이 LCD 스크린 위를 돌아다니며 흰색 길을 만들어요. 흰색 길은 개미의 페로몬을 시각적으로 나타난 거예요. 나머지 로봇들은 흰색 길을 광센서로 인식하고 리더 로봇을 따라 가는데, 이 광센서는 페로몬을 탐지하는 개미의 더듬이를 흉내낸 거지요.
군집로봇이 목표를 수행하기 위해선 로봇끼리의 의사소통 외에도 여러 기술들이 필요해요. 서울대학교 기계항공공학부 이동준 교수는 “최근 군집로봇의 이동과 위치 인식 기술 등이 상당히 발전하고 있다”고 말했답니다.
▼관련기사를 계속 보시려면?