“선장님, 큰일 났습니다. 바로 앞에 빙산이….” 미국까지 처녀항해에 나섰던 영국의 타이타닉호는 그렇게 바다 속으로 사라졌다. 1912년 4월 14일의 일이었다. 그로부터 타이타닉호가 ‘부활’ 할 때까지 무려 70년 이상이 걸렸다. ‘은인’ 은 바로 무인잠수정이었다.
무인잠수정, 나? 멀티플레이어
1985년 미 우즈홀해양연구소(WHOI)의 로버트 발라드 박사는 타이타닉호 발굴을 시도했다. 이미 십수년 동안 선박에 음파탐지기와 자력계를 매달고 해저를 샅샅이 뒤졌지만 번번이 실패했다. 결국 그의 선택은 연구소에서 제작한 무인잠수정 아르고였다.
자동차 크기에 썰매 모양인 아르고는 음파탐지기와 고성능 카메라를 탑재했고, 6천m 깊이까지 내려갈 수 있었다. 아르고로 탐사를 시작한 지 20일 후 드디어 포도주병, 매트리스, 전신기 등이 화면에 보이기 시작했다. 아르고 덕분에 3천8백10m 해저에 꼭꼭 숨어 있던 타이타닉호가 마침내 세상에 공개됐다.
아르고의 활약은 예견된 것이었다. 1966년 미국의 유인잠수정 앨빈은 미 공군기 B52가 잘못 떨어뜨린 수소폭탄을 회수했는데, 이때 CURV라는 무인잠수정을 사용한 사례가 있었다. 또 1973년 CURV III은 아일랜드 근처 수심 4백20m에 침몰한 유인잠수정 PISCES III에서 2명의 승무원을 구출하기도 했다.
1986년 불운하게 폭발한 우주비행선 챌린저의 잔해를 바다 속에서 찾아낸 것을 비롯해 1987년 남아프리카 항공기의 블랙박스를 수심 4천5백m에서 건져내는 등 무인잠수정은 그야말로 심해라는 미지의 그라운드에서 ‘멀티플레이어’ 역할을 톡톡히 해냈다.
환상의 드림팀, 복합형 수중로봇 시스템
한국도 드디어 다재다능한 무인잠수정의 덕을 볼 수 있게 됐다. 한국해양연구원이 해양수산부의 지원을 받아 2001년부터 개발해온 6천m급 심해용 무인잠수정이 설계를 마치고 드디어 제작에 들어갔기 때문. 2006년 말이면 순수 한국산 무인잠수정이 탄생할 예정이다.
미 우즈홀해양연구소는 이미 1990년대 초 6천m를 탐사할 수 있는 무인잠수정 제이슨과 메디아를 개발했다. 프랑스도 1997년 6천m급 무인잠수정 빅토르 6000을 개발했고, 같은 해 일본해양연구센터는 지구에서 가장 수심이 깊은 마리아나 해구를 조사할 목적으로 해저 1만1천m 깊이까지 탐사할 수 있는 카이코를 개발했다.
한국은 이들 해양선진국에 비해 무인잠수정 개발에 늦게 뛰어들었다. 1993년 한국해양연구원이 해저탐사를 위해 3백m급 무인잠수정 씨로브 300을 개발한 것이 최초다. 6천m급 무인잠수정을 개발하기까지 10년 이상 걸린 셈이다. 왜 이렇게 긴 시간이 필요했을까.
지구의 71%가 바다고, 이 중 60% 이상은 1천5백m가 넘는 심해다. 육지에서 가장 높은 8천8백48m의 에베레스트산도 마리아나 해구에는 거뜬히 빠질 정도로 깊다.
심해 정복이 어려운 가장 큰 이유는 이런 깊이에 따른 수압 때문이다. 바다 속에서는 수심이 10m 증가할 때마다 1기압씩 압력이 높아진다. 6천m 심해에서는 6백기압이라는 초고압 극한 조건이 되는 것이다. 우주보다 심해를 개발하는 것이 더 어렵다는 말이 있을 정도로 아직까지 바다는 우리에게 미지의 세계로 남아있다.
현재 이런 극한의 한계를 뛰어 넘어 개발 중인 한국해양연구원의 무인잠수정은 정확히 말해 ‘복합형 수중로봇 시스템’ 형태를 띤다.
혼란을 막기 위해 먼저 잠수 ‘함’ 과 잠수 ‘정’ 의 차이를 이해하자. 보통 잠수함은 강력한 추진력으로 바다 속을 순항하면서 주로 군사적 임무를 수행한다. 반면 잠수정은 대부분 소형이며 조종사 1명과 과학자 2-3명이 탑승해 해양과학조사를 하거나 상업적, 군사적으로 이용되는 것을 일컫는다.
무인잠수정은 다시 2가지로 나뉜다. 해상의 선박에서 원격조종을 통해 탐사하도록 설계된 것은 ROV(Remotely Operated Vehicle)형 무인잠수정이다. 반면 자체 지능을 가지고 있어 스스로 항해가 가능한 것은 AUV(Autonomous Underwater Vehicle)형 무인잠수정이다. 둘 모두 사람이 아니라 기계가 알아서 움직이는 셈이니 수중로봇이라고 생각하면 이해하기 쉽다.
한국산 무인잠수정에 ‘복합형’ 이란 용어를 붙인 것은 6천m급 ROV와 함께 AUV, 그리고 이들을 보조하는 수중진수장치가 하나의 시스템을 이루기 때문이다. 여기에 중앙 제어실이 있는 해상의 선박까지 더해지면 심해 탐사를 위한 ‘환상의 드림팀’ 이 구성된다.
초고압을 버티는 일이 관건
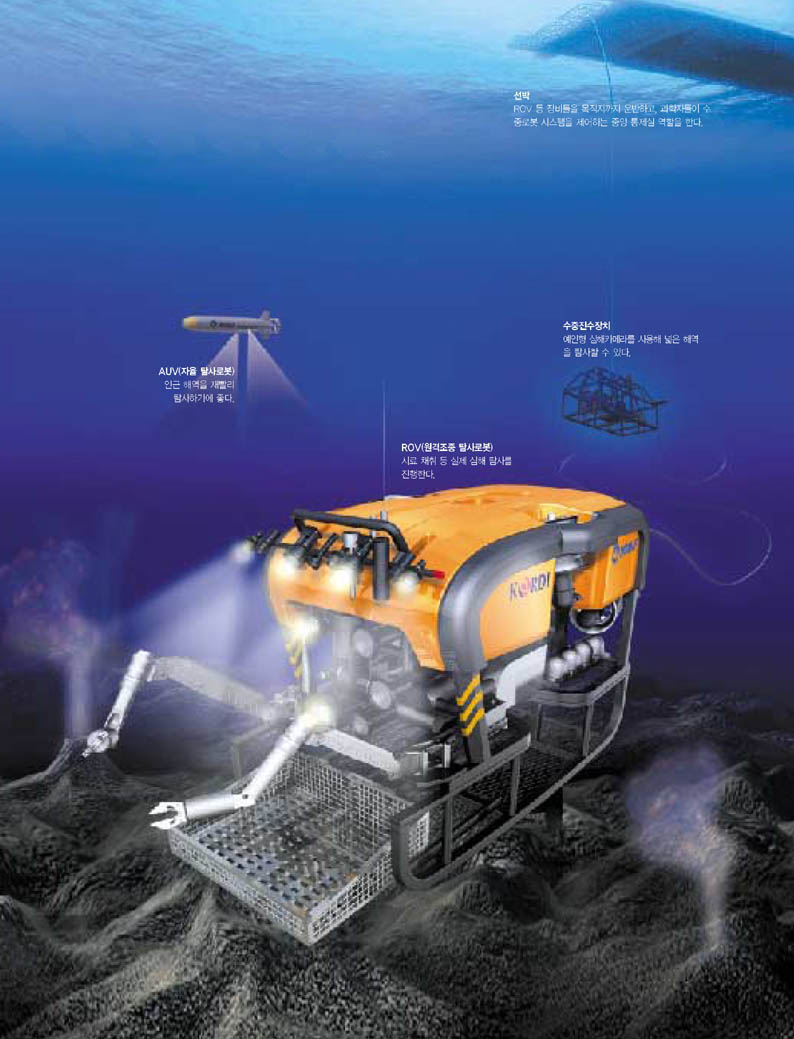
이제 복합형 수중로봇 시스템을 파헤쳐보자. 먼저 수중진수장치는 해상에 떠있는 해양조사선과 철갑 케이블로 연결돼있다. 수중진수장치의 가장 큰 기능은 AUV를 수중에서 진수하고 회수하는 임무다. 우주에서 도킹이 이뤄지는 것과 유사하다. AUV가 수중진수장치에 장착돼 있다가 수중 탐사를 위해 발사된 후 다시 수중진수장치로 돌아오는 것이다.
또 수중진수장치는 한국해양연구원이 보유한 예인형 심해카메라와 동일한 외형으로 설계돼 그 기능을 대체할 수 있는 것이 특징이다. 따라서 수중진수장치를 단독으로 탐사에 사용할 수 있다. 수중음향탐지기, 스틸 카메라, 컬러 비디오카메라 4대가 탑재돼 있기 때문에 수중진수장치를 예인하면서 넓은 해역의 해저 영상 촬영은 물론 초음파 해저 지형도를 작성할 수도 있는 것이다.
ROV는 복합형 수중로봇 시스템의 핵심이다. 수중진수장치에 케이블로 연결돼 바다 위 선박의 원격 제어에 따라 해저 6천m 깊이에서 시료를 채취하는 등 실제로 작업을 하는 장본인이기 때문에 고려할 사항이 한두가지가 아니다.
그 중 하나는 ROV가 물에 뜨거나 가라앉지 않아야 한다는 점이다. 이를 위해 바다 속에서 ROV의 무게와 부력이 같도록 맞춰야 한다. 이렇게 하면 물에 뜨거나 가라앉지 않는 중성부력 상태를 유지하기 때문에 해저에서 작업하는데 아무런 문제가 없다.
또 ROV에는 6백기압이라는 엄청난 압력이 가해지기 때문에 ROV 내부 장비들이 쪼그라들지 않도록 특수 장치가 필요하다. 그래서 ROV의 모든 장비는 내부에 기름을 채워 넣고 다시 밖을 감싸는 압력보상형 구조로 제작한다.
움직이는 기능 또한 빼놓을 수 없다. 여기에는 6개의 프로펠러가 사용된다. 전진속도는 1.5노트(1knot=0.514m/s)로 1시간에 약 2천8백m를 이동하는 빠르기다. 이밖에 심해는 빛이 통과하지 않아 어둡기 때문에 수중조명장치를 달아 탐사 지역을 비춘다.
AUV는 수중진수장치에서 발진해 인근 해역을 신속하고 정밀하게 조사한뒤 다시 수중진수장치로 귀환한다. ROV와 달리 수중진수장치에 케이블로 연결된 것이 아니라 자체 전력을 이용해 10km 내외의 비교적 짧은 거리를 주기적으로 왕복하면서 해저를 탐사한다. 전진속도는 3노트로 ROV보다 2배 가량 빠르다. 꼬리 쪽에 설치된 추진기로 추진력을 얻어 움직이며 수직 방향타와 수평 제어판을 이용해 스스로 운동을 제어한다.
수중복합항법시스템으로 한단계 업그레이드
한국산 탐사로봇 시스템은 ROV와 AUV 2개의 수중로봇으로 구성되고 전용 선박이 필요하지 않다는 점에서 미국의 무인잠수정 제이슨 II나 프랑스의 빅토르 6000과 유사하다.
하지만 한국산 탐사로봇 시스템은 이들과 비교해 몇가지 뛰어난 점이 있다.
우선 수중진수장치가 단독으로 심해를 탐사할 수 있다. ROV는 수중에서 이동속도가 느리기 때문에 넓은 해역을 빠른 시간에 탐사하기에 부적합하다. 한국산 심해탐사로봇은 ROV를 분리한 상태에서 수중진수장치를 선박으로 예인하면서 심해저를 재빨리 탐사할 수 있다.
이때 정밀도가 높지 않은 초단기선 초음파위치추적장치(USBL)를 이용해 이동중인 수중진수장치의 위치를 추적할 수 있다. USBL은 수심에 대해 약 0.3%의 오차가 있기 때문에 6천m 심해를 탐사할 경우에는 18m 가량의 위치 오차가 발생한다. 하지만 이런 오차를 줄이기 위해 한국산 탐사로봇 시스템은 넓은 해역에 걸쳐 위치를 추적하면서도 특정 해역에서는 위치를 정밀하게 추적할 수 있는 수중복합항법시스템을 이용한다. 외국의 무인잠수정보다 뛰어난 두번째 특징이다.
무엇보다 수중복합항법시스템은 한국해양연구원이 독자적으로 개발했다. 이를 이용하면 6천m 심해에서 위치 오차를 5m 이내로 줄일 수 있다.
이렇게 정밀한 수중항법시스템이 확보되기 때문에 AUV가 심해에서 수중진수장치로부터 발진한 후 길을 잃는 일 없이 무사히 귀환할 수 있다. 해저의 시계가 불량한 경우에도 AUV가 카메라에 전적으로 의존하지 않고 수중복합항법시스템을 보조적으로 사용해 무사히 도킹이 이뤄진다.
2006년 말 6천m급 한국산 무인잠수정 개발이 완료되면 동해 해저 2천-3천m와 태평양 6천m 심해를 정밀하게 탐사할 수 있는 길이 활짝 열린다.
순수 한국 기술로 해저의 정밀 지형도를 작성하고, 지질을 분석하며, 심해자원을 탐사하고 심해생태계 등을 연구할 수 있게 되는 것이다. 특히 석유가 고갈되면서 차세대 대체연료로 부각되는 해저 메탄수화물에 대한 조사가 우선적으로 추진될 예정이다.
첨단 퓨전과학의 결정체, 마린테크놀로지 미래형 바다로 탈바꿈한다
세계적인 미래학자 피터 드러커는“해양산업이 21세기 세계산업을 주도할 것”이라고 전망했다. 3면이 바다인 우리나라는 선박건조량에서 세계 1위, 콘테이너 처리 용량에서 세계 6위를 기록하는 등 해양산업에서 이미 세계적인 경쟁력을 확보했다. 그러나 미국, 일본, 프랑스, 영국 같은 해양선진국에 비하면 기술 수준이 약 40%에 머물러 있다.
이에 한국해양연구원에서는 첨단해양산업 육성기술, 해양자원 개발∙이용기술, 해양환경 관리∙보전기술을 중심으로 해양과학기술(Marine Technology)을 집중 육성, 해양과학강국으로 발돋움하기 위한 야심찬 계획을 수립하고 있다. 마린테크놀로지가 만들어갈 미래 바다의 모습을 살펴보자.
▼관련기사를 계속 보시려면?
바다, 끝없는 프론티어
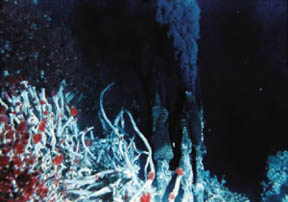
01. 기묘한 생물 천국, 해저 5천m의 세계
02. 심해를 누비는 드림팀, 수중로봇 시스템
03. 물고기 호텔, 바다목장이 양식 확 바꾼다
마린 테크놀로지로 '마린토피아' 를 꿈꾼다
04. 남획 막아야 해양선진국 된다