너무 어려워서 섣불리 다가가지 못했던 과학 난제. 그런데 이 난제에 당당히 도전장을 내민 과학자들이 있습니다. 다양한 난제들 중 어과동이 3개의 난제를 꼽아 보았는데요, 우선 첫 번째 문제는….
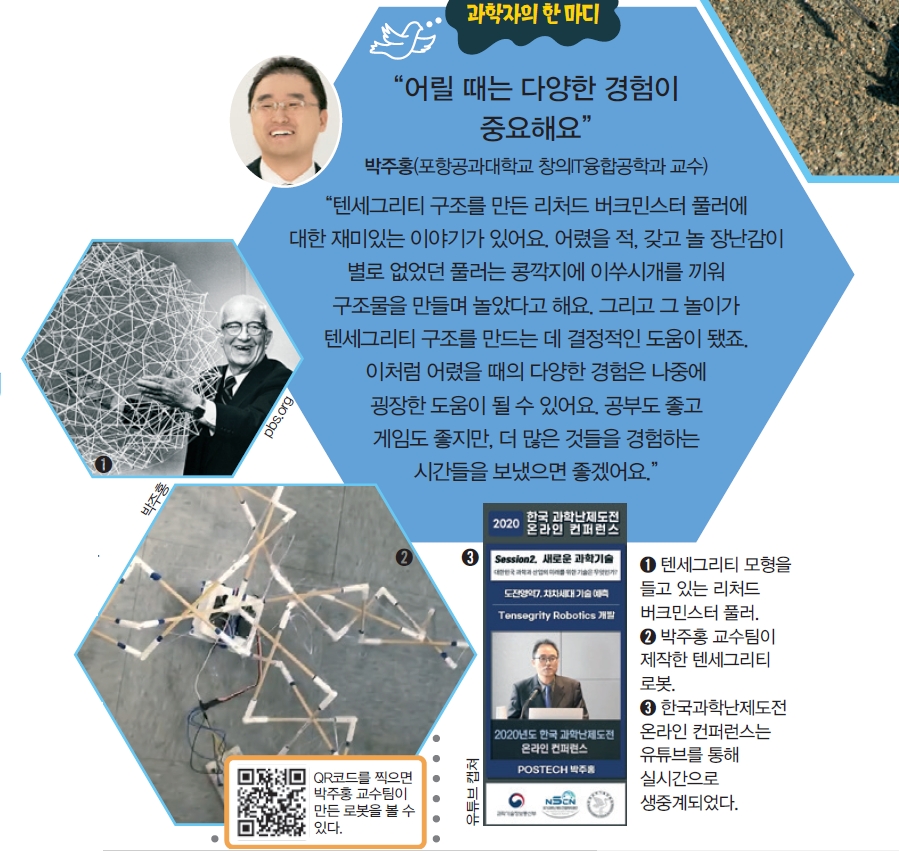
4월 22일부터 23일까지, ‘한국과학난제도전 온라인 컨퍼런스’ 가 유튜브를 통해서 생중계되었어요. 이 컨퍼런스는 14명의 과학자가 난제 해결의 아이디어를 발표하는 자리였답니다. 한국과학기술한림원에서 과학자들에게 받은 92건의 난제 해결 아이디어 중 문제의 참신함, 중요성, 발전 가능성 등을 기준으로 14개 아이디어를 선정했지요. 여러 난제들 중 어과동의 관심을 끈 첫 번째 난제는 포항공과대학교 박주홍 교수가 발표한 ‘미래의 로봇은 어떤 모양일까?’였어요.
현재의 로봇은 구조적으로 몇 가지 한계를 지니고 있어요. 첫 번째는 ‘크기를 키우는 게 어렵다’는 점이에요. 크기가 커지면 로봇이 지탱해야 하는 무게가 늘어나는데, 이러면 로봇이 자세를 유지하기 힘들어지거든요. 그래서 1m짜리 로봇을 2m로 키우려면 단순히 부품의 크기를 2배로 늘리는 것이 아니라, 완전히 새롭게 설계를 해야 한답니다. 또한, 지금은 1kg짜리 물건을 들기 위해서 50kg 정도의 로봇을 만들어야 할 정도로 작업 효율도 좋지 않죠.
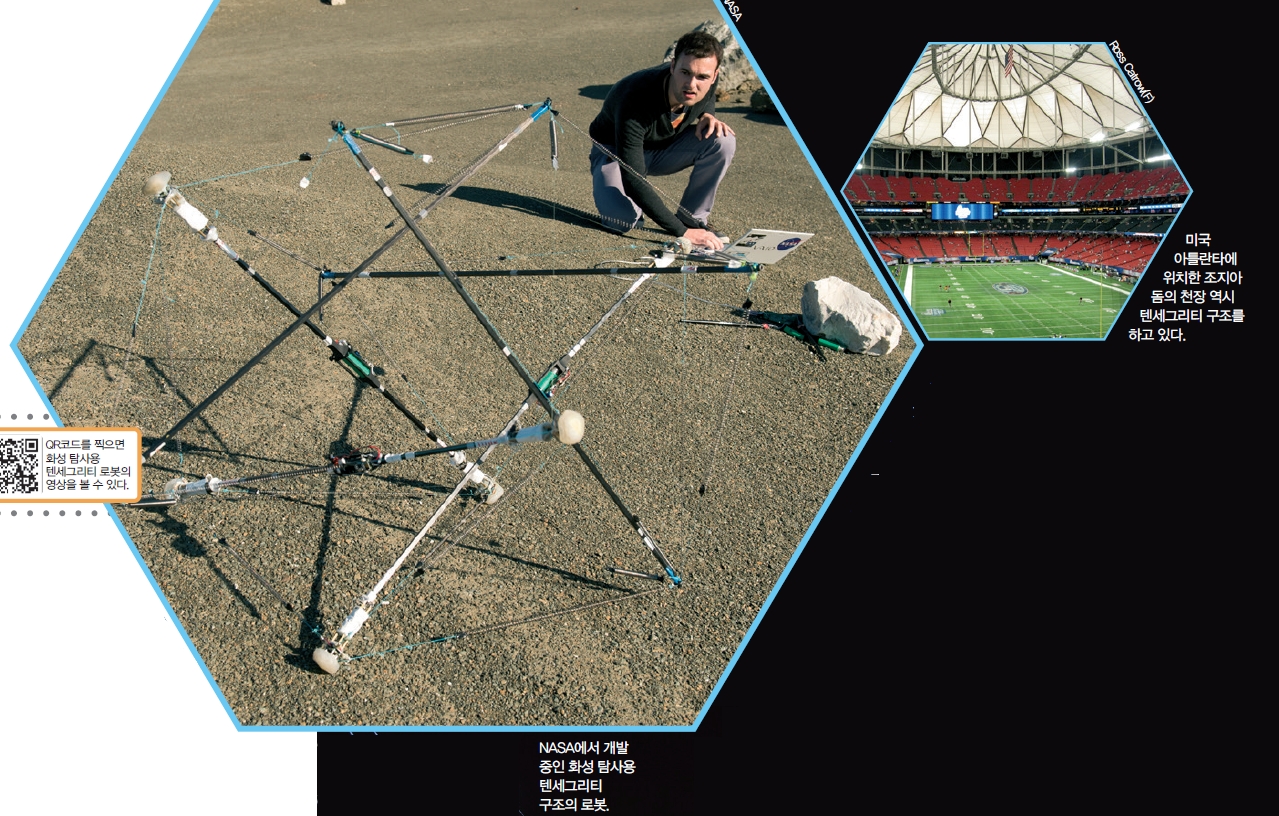
박주홍 교수는 이러한 한계점을 극복할 방법으로 ‘텐세그리티 구조’를 연구하고 있어요. 텐세그리티 구조는 미국의 건축가 리처드 버크민스터 풀러가 1960년대에 만들었어요. 단단한 재질의 막대와 이를 팽팽하게 잡아당기는 케이블이 지요. 뼈와 근육으로 이뤄진 인체도 일종의 텐세그리티 구조랍니다. 견고할 뿐만 아니라 적은 재료로도 안정적인 구조물을 만들 수 있어 가볍다는 장점이 있지요. 또한 탄성을 가지는 케이블 덕분에 외부에서 오는 충격이 구조 전체로 분산되어 충격을 효과적으로 흡수할 수 있고요. 그래서 미국항공우주국(NASA)에선 2012년부터 화성 탐사 로봇을 텐세그리티 구조로 만들기 위한 연구를 이어가고 있답니다.
박주홍 교수는 텐세그리티 구조의 로봇을 개발하기 위해 다양한 분야의 연구를 접목시키고 있어요. 로봇 공학부터 해부학, 건축 분야의 전문가들과 함께 연구를 진행하고 있지요. 또한 치밀한 설계를 바탕으로 로봇을 제작했던 기존 방법과는 달리, 일단 간단한 모양의 로봇을 먼저 만든 뒤 실제 움직임을 보고 단점을 보완해나가는 전략을 사용하고 있답니다. 설계와 현실 사이의 차이에서 오는 실패를 빠르게 극복하기 위함이죠.