저부터 소개해도 될까요? 휴머노이드야말로 앞으로 로봇 100년을 이끌어갈 든든한 맏형이죠. 공장과 식당 등에서 쓰이는 로봇팔이 저에게서 나온 것을 모두 알고 있겠죠? 엣헴! 최근 연구를 보고 저와 로봇팔이 얼마나 정교해질지 상상해 보세요!
새로운 동작 어려워하는 로봇, 해결 방법은?
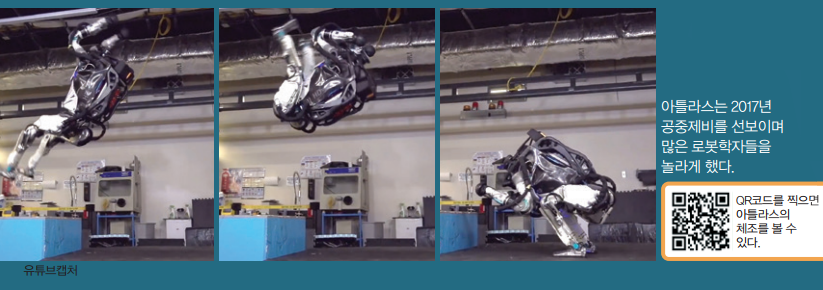
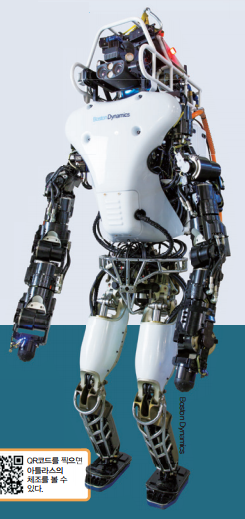
지난해 9월 미국 로봇회사 보스턴다이나믹스는 휴머노이드 아틀라스가 피겨 선수처럼 뛰어올라 두 다리를 찢는 영상을 공개했어요. 아틀라스는 이전에도 넘어질 뻔하다 금세 자세를 잡아 화제가 됐지요. 이처럼 힘 있게 움직이면서도 넘어지지 않는 2족 보행로봇은 처음이었죠. 박종우 교수는 “하드웨어도 정교하겠지만, 각 부품을 조종하는 소프트웨어 기술도 한몫한 것”이라고 설명했어요.
소프트웨어는 로봇의 각 관절이 어떻게 움직여야 하는지 계산해요. 관절의 수가 많을수록 로봇은 자연스럽게 행동하지만, 그만큼 계산 시간이 오래 걸려요. 이 때문에 휴머노이드는 위급한 상황에 빠르게 대처하지 못하고 넘어지기 쉬웠어요. 이 문제를 극복하기 위해 로봇학자들은 계산량을 줄이는 방법을 찾고 있어요. 박 교수는 “손가락을 구부릴 때 두 번째 관절만 움직이면 나머지는 따라 움직인다”며, “이런 성질을 로봇에도 적용하는 방법을 연구 중”이라고 말했어요.
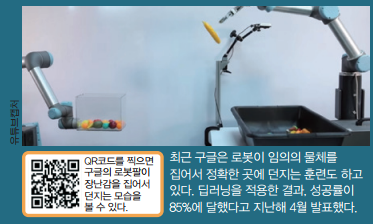
한편, 구글은 2016년부터 딥러닝*을 이용해 로봇팔 수십 대에게 장난감을 잡는 훈련을 시켰어요. 성공한 경우와 실패한 경우를 모두 저장해 학습시키면, 로봇은 자동으로 장난감 잡는 법을 배운답니다.
로봇 전신에 피부를 입혀라!
로봇이 다양한 물건을 사람처럼 자연스럽게 잡으려면 필요한 게 더 있어요. 바로 ‘촉감’이에요. 1980년대 스웨덴 심리학자 롤렌스 요한슨은 성냥을 들어 불을 붙이는 행동에 촉감이 얼마나 중요한지 알아보는 실험을 했어요. 피험자는 평소에는 재빨리 성냥에 불을 붙였지만, 둘째와 셋째 손가락을 마취시켰을 땐 25초나 걸렸지요. 실시간으로 촉감을 느끼며 손가락 힘과 각도를 조절해야 성냥을 떨어뜨리지 않을 수 있었던 거예요.
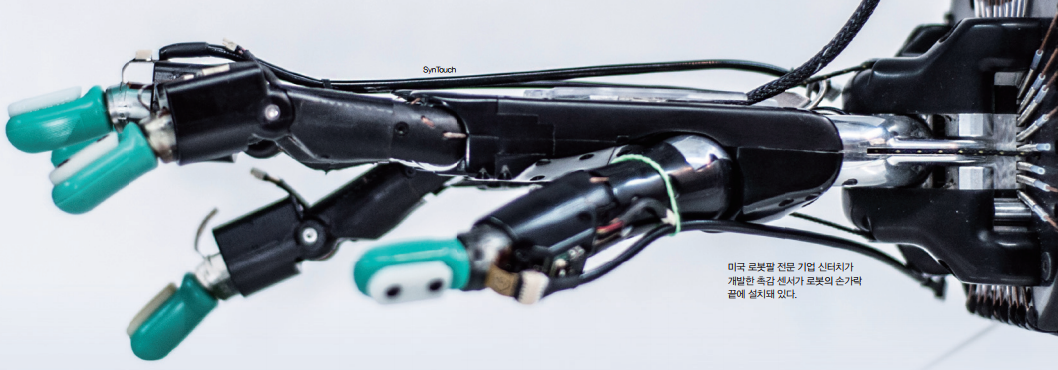
하지만 로봇이 사람처럼 촉감을 느끼는 건 쉬운 일이 아니에요. 한국과학기술원 기계공학과 김정 교수는 “사람의 손에는 촉감 수용기가 약 1만 7천 개 있지만, 로봇 손은 비용 탓에 많아야 십여 개의 센서를 손가락 끝에만 달고 있다”며, “현재 구현된 촉감은 사람의 30% 수준”이라고 말했어요.
이런 문제를 극복하기 위해 교수팀은 지난해 8월 센서 수가 적어도 넓은 범위에서 균일하게 촉감을 느낄 수 있는 인공피부를 개발했어요. 센서가 없는 곳을 눌러도 피부에 전류가 발생해 주변 센서가 눌린 위치를 알아차리지요. 2018년에는 로봇 전신에 뿌리는 액체인공피부를 개발하기도 했어요. 김 교수는 “촉감은 로봇이 어딘가 부딪혀 부서지지 않기 위해서도 필요한 감각”이라며, “로봇이 수많은 자극 중 위험한 것만 알아내는 기술도 개발돼야 한다”고 말했답니다.