다른 로봇들은 사람과 부딪혀도 부서지지 않기 위해 많은 노력을 하는구나.
우리 소프트로봇처럼 말랑말랑하다면 부서질 걱정은 없을 텐데 말야! 게다가 다양한 환경에 맞게 몸을 쉽게 변신시킬 수 있다고. 나야말로 로봇의 미래가 아니겠어?
커다란 로봇도 접어서 주머니에 쏙?
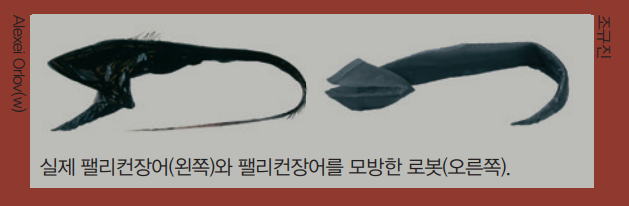
딱딱한 금속으로 이뤄진 기존의 로봇과 달리 신축성이 있고 변형이 쉬운 신소재로도 로봇을 만들어요. 바로 ‘소프트로봇’이지요. 지난해 11월 서울대학교 기계공학과 조규진 교수팀은 펠리컨장어를 닮은 소프트로봇을 발표했어요. 펠리컨장어는 깊이 550~3000m의 심해에 사는 어류로, 사냥을 할 때 먹이를 많이 쓸어 담기 위해 입 주변 피부를 늘려 입을 매우 크게 벌리는 것이 특징이에요.
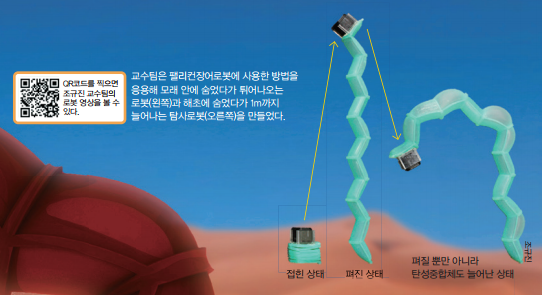
교수팀은 고무처럼 탄성력이 있는 소재인 탄성중합체를 종이접기 방법으로 접어 펠리컨장어가 입을 열고 피부를 늘리는 방식을 로봇에 구현했어요. 탄성중합체에 연결된 액추에이터*에 공기를 불어넣자, 접혀있던 탄성중합체가 펴지면서 입을 벌릴 뿐만 아니라 탄성중합체 자체도 장어의 피부처럼 팽창됐어요. 이 방법을 응용해 해초에 숨어 있다가 1m까지 커지는 로봇 등을 만들었지요.
로봇을 개발한 김웅배 연구원은 “부드러운 물질로 종이접기를 하면 로봇을 쓰지 않을 때는 조그맣게 있다가 필요할 때 커지도록 만들 수 있다”고 말했어요. 게다가 평소에는 접힌 상태로 있도록 함으로써 소프트로봇이 공기 압력 등으로 팽팽해지지 않을 때는 흐물흐물하게 늘어지며 모양이 변형되는 단점도 극복한 거랍니다.
액추에이터 개발과 움직임 예측이 과제
소프트로봇은 딱딱한 로봇에 비해 낯선 환경에 잘 적응해요. 물렁한 몸은 주변 환경에 맞게 크기와 모양이 쉽게 변하거든요. 문제는 어떻게 변할지 정확히 예측하기 어렵다는 점이에요. 관절만 회전하는 딱딱한 로봇에 비해 소프트로봇은 모양을 바꾸는 방법이 다양하고 복잡하거든요. 로봇을 생활에서 쓰려면 정밀하게 제어할 수 있어야 하므로 움직임을 쉽게 예측할 계산법을 찾아야 해요.
더 좋은 액추에이터도 필요해요. 공기를 쓰는 액추에이터는 커다란 펌프가 있어야 해 소형 로봇에는 어울리지 않아요. 로봇학자들은 부피가 작은 액체를 섞어 공기를 발생시키거나, 작은 전극을 이용하는 등의 아이디어를 내고 있답니다.

INTERVIEW

조규진(서울대학교 기계공학과 교수)
“이것도 로봇이냐고요?”
소프트로봇은 워낙 다양한 모습을 지니고 있어서 정의를 단정짓기 어려워요. 저는 유연한 재료를 사용해보자는 일종의 ‘패러다임*’이라고 생각해요. 소프트로봇을 움직이는 전략은 이전과 완전히 달라요. 딱딱한 로봇은 모터로 관절을 얼마나 돌릴지 등을 계산했지만, 소프트로봇은 재료 자체의 특성에 의존하죠. 아직은 실생활에 잘 쓰이지 않지만, 기존 로봇이 자동화하지 못했던 분야에서 소프트로봇의 잠재력이 크답니다.
* 액추에이터 : 액체와 기체의 압력이나 전기 등을 사용해 기계를 움직이는 장치.
* 패러다임 : 어떤 한 시대에 사람들의 견해나 사고를 지배하는 이론적 틀이나 개념.