 꼬물꼬물 움직이는 애벌레 로봇
꼬물꼬물 움직이는 애벌레 로봇애벌레는 보통 몸을 ‘Ω’ 모양으로 크게 웅크렸다가 ‘一’자로 쭉 피며 앞으로 나아가요. 그런데 사실 애벌레마다 특징이 있답니다.
애벌레의 움직임이 바닥의 마찰력과 연관이 있을 거라고 생각한 일본 도쿄대학교 타쿠야 우메다치 박사팀은 애벌레 로봇을 직접 제작했어요. 이 로봇 안에는 촉감을 느끼는 센서가 들어 있어서 바닥의 마찰력을 감지해 애벌레 로봇이 효율적으로 움직일 수 있게 돕지요. 연구팀이 바닥의 마찰력에 변화를 주자, 로봇은 진짜 애벌레처럼 몸을 웅크리는 정도를 변화시켰답니다.
높이뛰기 최강자, 거품벌레 로봇!
서울대학교 조규진 교수와 서울과학기술대학교 정광필 교수는 거품벌레의 동작을 따라한 로봇을 개발했어요. 점프를 높이 하려면 공중에서 돌지 않는것이 중요해요. 공중에서 회전을 하면 점프에 필요한 에너지가 분산돼 버리거든요. 이를 위해 연구팀은 각각의 다리에 톱니를 설치했어요. 그 결과, 톱니가 맞물리면서 두 다리의 움직임이 서로 같아져서 안정적으로 점프를 할 수 있었답니다. 또한 거품벌레 로봇은 다리의 각도를 조절해서 점프 방향을 바꿀 수도 있었어요.
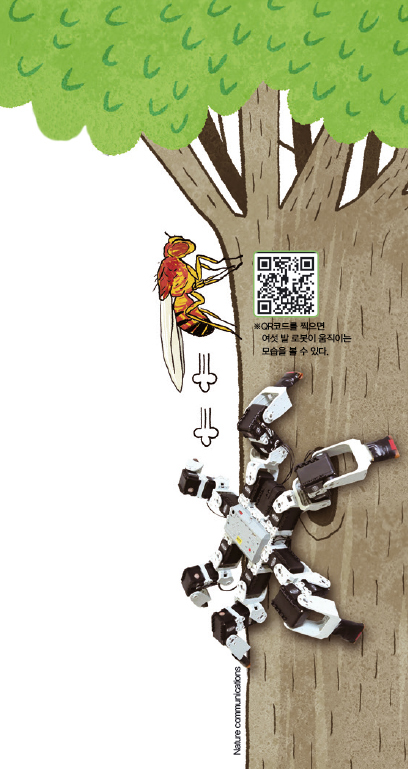
파리의 걸음걸이를 연구하는 로봇?
스위스 로잔연방공대 페이반 람드야 교수팀은 직접 로봇을 만들어 노랑초파리의 걸음걸이를 연구했어요. 연구팀은 컴퓨터 시뮬레이션과 로봇으로 노랑초파리가 두 발과 세 발을 한 짝으로 움직일 때의 속도를 각각 비교했답니다. 그 결과, 두 발을 한 짝으로 움직일 때 이동 속도가 더 빨랐어요.
그런데 사실, 파리를 포함해 모든 곤충은 세 발을 한 짝으로 움직여요. 왜 그럴까요? 연구팀은 초파리의 발에서 나오는 끈끈한 액체에서 그 이유를 찾았어요. 이 액체는 파리가 벽을 기어오를 수 있게 돕는답니다. 연구팀이 로봇의 발에 끈끈한 물질을 바르고 같은 실험을 반복해 본 결과, 세 발을 한짝으로 움직일 때가 더 빨랐어요. 즉, 벽을 기어 오를 땐 이렇게 움직이는 게 유리한 거죠.
끊임없이 물결치는 박테리아 꼬리 로봇!
이스라엘 벤구리온대학교 데이빗 자럭 교수팀은 편모의 움직임을 닮은 로봇을 만들었어요. 박테리아는 꼬리에 해당하는 편모를 ‘S’자로 흔들며 부드럽게 이동한답니다. 이 로봇은 나선 모양의 중심축에 여러 개의 관절로 이루어진 넓은 판을 끼운 모양이에요. 나선 모양 중심축이 빙글빙글 돌면 이를 따라서 관절들이 위 아래로 움직이며 S자 모양으로 움직이지요.
로봇은 울퉁불퉁한 땅에서도 문제없이 앞으로 나아갔어요. 심지어 물속에서도 땅에서 움직이듯 유유히 헤엄을 칠 수 있었답니다.
스위스 로잔연방공대 페이반 람드야 교수팀은 직접 로봇을 만들어 노랑초파리의 걸음걸이를 연구했어요. 연구팀은 컴퓨터 시뮬레이션과 로봇으로 노랑초파리가 두 발과 세 발을 한 짝으로 움직일 때의 속도를 각각 비교했답니다. 그 결과, 두 발을 한 짝으로 움직일 때 이동 속도가 더 빨랐어요.
그런데 사실, 파리를 포함해 모든 곤충은 세 발을 한 짝으로 움직여요. 왜 그럴까요? 연구팀은 초파리의 발에서 나오는 끈끈한 액체에서 그 이유를 찾았어요. 이 액체는 파리가 벽을 기어오를 수 있게 돕는답니다. 연구팀이 로봇의 발에 끈끈한 물질을 바르고 같은 실험을 반복해 본 결과, 세 발을 한짝으로 움직일 때가 더 빨랐어요. 즉, 벽을 기어 오를 땐 이렇게 움직이는 게 유리한 거죠.
끊임없이 물결치는 박테리아 꼬리 로봇!
이스라엘 벤구리온대학교 데이빗 자럭 교수팀은 편모의 움직임을 닮은 로봇을 만들었어요. 박테리아는 꼬리에 해당하는 편모를 ‘S’자로 흔들며 부드럽게 이동한답니다. 이 로봇은 나선 모양의 중심축에 여러 개의 관절로 이루어진 넓은 판을 끼운 모양이에요. 나선 모양 중심축이 빙글빙글 돌면 이를 따라서 관절들이 위 아래로 움직이며 S자 모양으로 움직이지요.
로봇은 울퉁불퉁한 땅에서도 문제없이 앞으로 나아갔어요. 심지어 물속에서도 땅에서 움직이듯 유유히 헤엄을 칠 수 있었답니다.