유연해진 로봇이 온다!
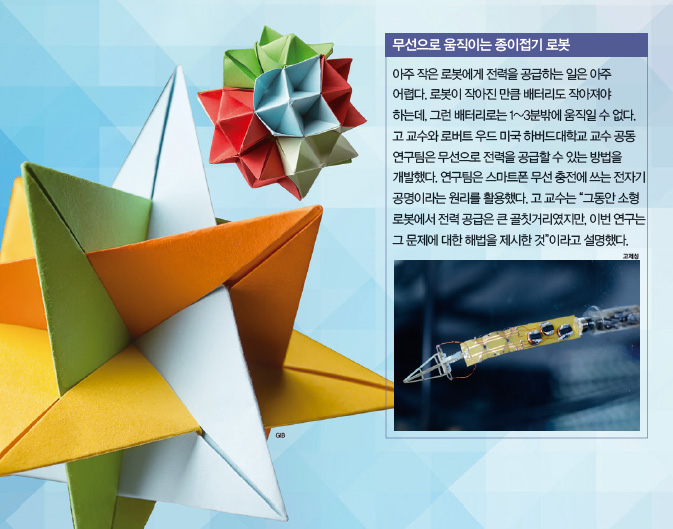
첫 번째로 소개할 로봇은 마치 종이처럼 접히는 로봇이에요. 로봇의 관절을 종이접기 이론을 활용해 만드는 것이지요. 종이접기는 점이나 선, 면, 공간 등의 관계를 연구하는 기하학의 재미있는 연구 주제 중 하나예요.
로봇에 종이접기 이론을 활용하는 이유는 무엇일까요? 손목을 다양한 방식으로 움직여 보세요. 위아래, 돌리기, 왼쪽, 오른쪽 등 여러 방법으로 움직일 수 있을 거예요. 그런데 로봇팔은 그렇게 만들기가 쉽지 않아요. 관절 하나가 한 가지 방법으로 움직이게 만들 수밖에 없지요. 물론 관절을 여러 개 연결해 만들면 다양하게 움직일 수 있겠지만, 복잡하고 비효율적인 로봇이 돼요.
종이접기 원리를 이용해 로봇을 만들면 이보다 훨씬 자유롭게 움직일 수 있어요. 구조를 유지하면서 여러 방향으로 움직일 수 있게 하는 원리를 응용하는 것이지요. 종이접기를 활용해 곤충 크기의 소형 로봇을 만들고 있는 고제성 아주 대학교 기계공학과 교수는 “종이접기를 활용하면 기존 방법보다 작게 만들 수 있고, 프린터로 2차원 전개도를 출력한 뒤 접어 로봇을 만드는 것도 가능하다”고 말했어요.
종이탑을 쌓아 만든 로봇
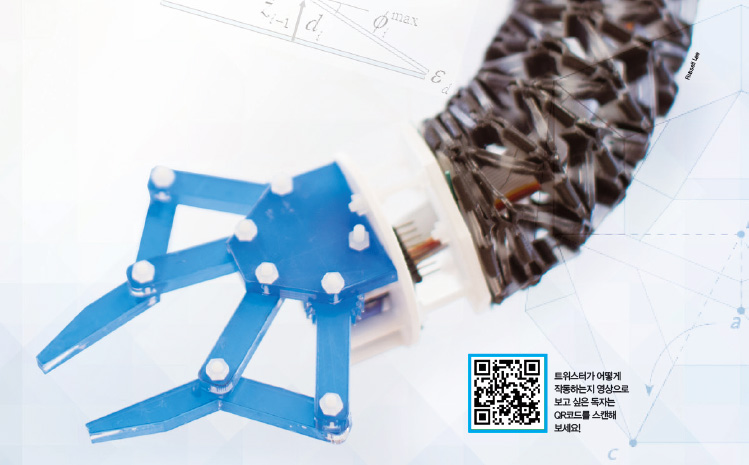
위에 보이는 신기하게 생긴 로봇은 무엇일까요? 구부러지고, 수축하고, 비틀어지는 ‘트위스터’라는 로봇이에요. 이기주 미국 케이스웨스턴리저브대학교 기계항공공학과 교수팀이 개발해 9월 27일 ‘IEEE/RSJ 지능형 로봇과 시스템 국제회의’에서 발표했지요. 유연하게 다양한 방식으로 움직일 수 있는 이 로봇팔의 핵심 원리는 일본의 종이 작가 미호코 타치바나가 설계한 ‘꼬인 종이 타워’예요.
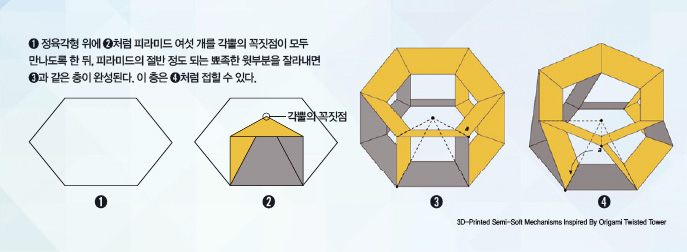
트위스터는 아래에 보이는 그림➌과 같은 다면체 모양의 층이 겹겹이 쌓여서 탑을 이루는 형태예요. 정육각형을 상상해 보세요. 그 위에 여섯 개의 피라미드를 가로로 눕혀요. 그 다음 정육각형 각 변에 피라미드 6개 각각의 밑면의 한 변을 대응시켜 둘러싸요. 이때 모든 각뿔의 꼭짓점이 만나도록 피라미드의 높이와 변의 길이를 정합니다. 마지막으로 피라미드의 절반 정도 높이의 밑 부분만 남기고 뾰족한 윗부분은 모두 잘라내요. 그러면 그림➌과 같은 정육각형층 하나가 돼요. 이를 기본으로 탑을 쌓으면 트위스터의 기본 골격이 완성됩니다.
▼관련기사를 계속 보시려면?