한 발로 중심을 잡아라!
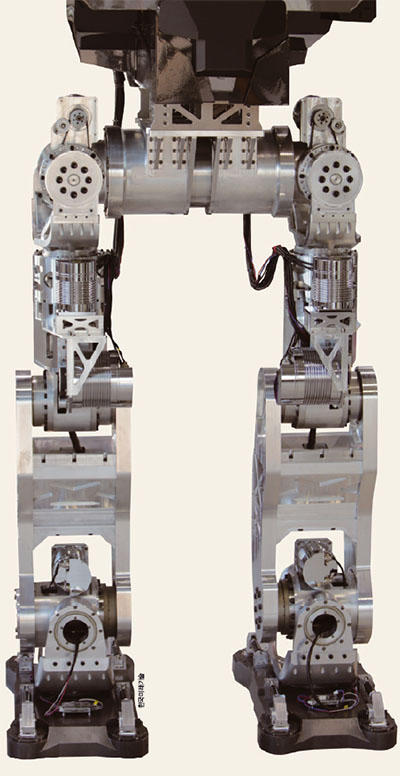
키는 4m, 무게는 1.6t이나 되는 거대로봇이 어떻게 안정적으로 걸을 수 있을까요? 메소드-2 프로젝트에는 참여했던 서울과학기술대 김정엽 교수님을 비롯한 많은 로봇과학자들은 로봇이 두 발로 걷기 위해서 가장 중요한 것은 한 발로도 중심을 잡을 수 있는 기술이라고 말하고 있어요.

우리가 두 발로 걸을 때는 몸의 무게 중심을 옮기면서 발을 교대로 내딛는 걸 반복해요. 즉, 걷는 과정에서 무게 중심이 항상 땅에 내딛은 발 쪽으로 이동해야 하는 거죠. 이를 ‘한 발 지지상태 안정화’라고 해요. ‘왼발 안정화-오른발 내딛기-오른발 안정화-왼발 내딛기-왼발 안정화’ 과정을 거듭하면서 넘어지지 않고 앞으로 걸을 수 있는 거예요.
이를 위해선 로봇의 ZMP가 항상 땅과 맞닿은 발바닥의 중심에 있어야 해요. ZMP란 로봇이 움직일 때의 균형점을 말해요(●). 중력과 관성력 등 로봇이 움직일 때 발생하는 여러 가지 힘이 합쳐져 ‘0’이 되는 점이지요. 로봇의 발에는 힘과 회전력을 측정하는 센서가 있고, 골반에는 기울기 센서가 있어요. 그래서 로봇이 움직일 때마다 센서가 작동해 ZMP가 발의 중심에 오도록 상체를 움직이게 되는 거랍니다.
이를 위해선 로봇의 ZMP가 항상 땅과 맞닿은 발바닥의 중심에 있어야 해요. ZMP란 로봇이 움직일 때의 균형점을 말해요(●). 중력과 관성력 등 로봇이 움직일 때 발생하는 여러 가지 힘이 합쳐져 ‘0’이 되는 점이지요. 로봇의 발에는 힘과 회전력을 측정하는 센서가 있고, 골반에는 기울기 센서가 있어요. 그래서 로봇이 움직일 때마다 센서가 작동해 ZMP가 발의 중심에 오도록 상체를 움직이게 되는 거랍니다.


뒤꿈치로 딛고 앞꿈치로 땅을 차라!
로봇과학자들은 로봇이 좀 더 자연스럽게 걸을 수 있는 방법을 연구하고 있어요. 현재 거대로봇은 무릎을 크게 들며 느린 속도로 뚜벅뚜벅 걷는 정도거든요. 만약 계단이나 울퉁불퉁한 길, 장애물이 있는 등 다양한 상황에서 지금과 같은 방식으로 걷는다면 쉽게 넘어지고 말거예요.
로봇과학자들은 로봇이 좀 더 자연스럽게 걸을 수 있는 방법을 연구하고 있어요. 현재 거대로봇은 무릎을 크게 들며 느린 속도로 뚜벅뚜벅 걷는 정도거든요. 만약 계단이나 울퉁불퉁한 길, 장애물이 있는 등 다양한 상황에서 지금과 같은 방식으로 걷는다면 쉽게 넘어지고 말거예요.
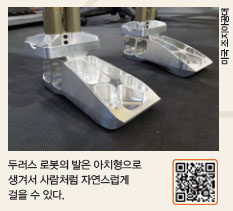
최근 조지아공대 연구팀은 사람처럼 자연스러운 걸음걸이를 구현하기 위해 발바닥 모양에 주목했어요. 로봇의 딱딱한 걸음걸이가 평평한 발바닥 때문이라고 생각한 거예요. 그래서 발바닥을 아치형으로 만들고, 발목과 발 사이에 스프링을 넣은 ‘두러스’를 만들었어요. 이 로봇은 뒤꿈치부터 땅에 딛고, 앞꿈치로 땅을 차면서 걸어요. 이때 발목과 발 사이의 스프링은 사람의 힘줄 역할을 해서 땅을 디딘 뒤꿈치가 효율적으로 들어올려지도록 한답니다.
연구를 주도한 아론 에임스 교수는 “두러스는 사람의 동작을 본떴기 때문에 평발을 가진 로봇보다 더 멀리, 더 빠르게 걸을 수 있다”고 말했어요.
연구를 주도한 아론 에임스 교수는 “두러스는 사람의 동작을 본떴기 때문에 평발을 가진 로봇보다 더 멀리, 더 빠르게 걸을 수 있다”고 말했어요.