◀한국과학기술원(KAIST)의 FX-1은 탑승형 로봇이지만 팔이 없어서 다양한 임무를 수행하는 데 한계가 있다.
◀한국과학기술원(KAIST)의 FX-1은 탑승형 로봇이지만 팔이 없어서 다양한 임무를 수행하는 데 한계가 있다.조종석은 가슴이나 복부에!
사람을 닮은 휴머노이드 디자인은 로봇이 사람과 비슷하게 행동할 수 있다는 것이 가장 큰 장점이에요. 팔을 이용해 도구를 사용하거나 물건을 집는 등의 행위를 할 수 있지요.
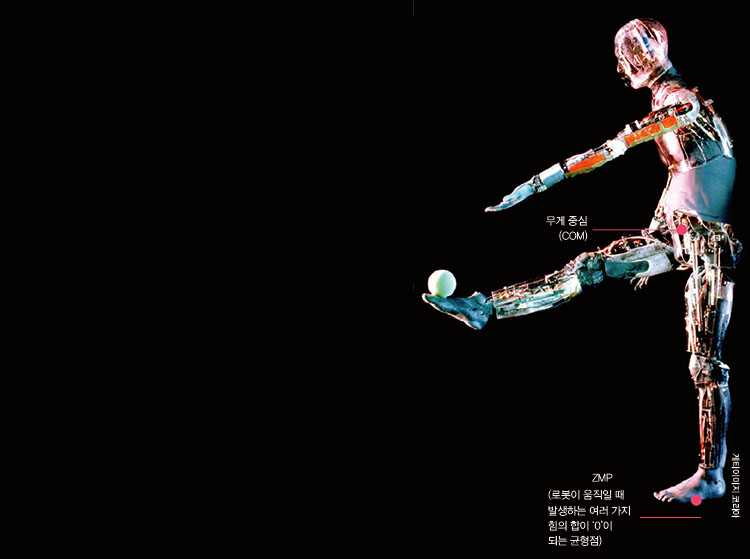
그러나 거대로봇에 팔이 생겼을 때 단점도 있어요. 팔과 다리도 매우 크고 무겁기 때문에 움직일 때마다 몸이 휘청거릴 수 있거든요. 메소드-2의 팔 하나의 무게는 130kg에 달해요. 그래서 앞으로 주먹을 내지르면 로봇의 몸 전체가 같이 움직여 균형을 잡기가 더욱 어려워진답니다.
사람을 닮은 휴머노이드 디자인은 로봇이 사람과 비슷하게 행동할 수 있다는 것이 가장 큰 장점이에요. 팔을 이용해 도구를 사용하거나 물건을 집는 등의 행위를 할 수 있지요.
그러나 거대로봇에 팔이 생겼을 때 단점도 있어요. 팔과 다리도 매우 크고 무겁기 때문에 움직일 때마다 몸이 휘청거릴 수 있거든요. 메소드-2의 팔 하나의 무게는 130kg에 달해요. 그래서 앞으로 주먹을 내지르면 로봇의 몸 전체가 같이 움직여 균형을 잡기가 더욱 어려워진답니다.
따라서 팔까지 모두 갖춘 거대로봇을 만들기 위해선 질량을 효과적으로 배치하는 것이 매우 중요해요. 발전기, 모터 같은 무거운 부품이나 조종석은 가슴이나 복부에 두는 게 좋지요. 가슴이나 복부는 다른 부위에 비해 움직임이 적고, 로봇의 무게 중심(COM)에서 가깝기 때문에 로봇이 움직이더라도 안정적이거든요. 랜드워커와 쿠라타스, 메소드-2 등 탑승형 로봇들 모두 조종석이 가슴 부위에 위치해 있는 이유가 이 때문이랍니다.
거대로봇, 다이어트가 필수!
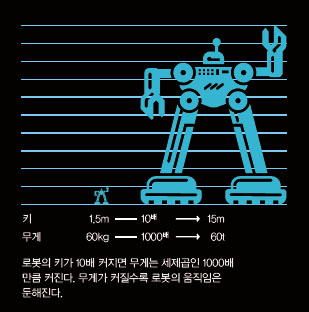
거대로봇 설계에서 신경 써야 할 또 다른 부분은 ‘무게’예요. 키가 커질수록 몸무게는 늘어나고, 로봇의 힘은 약해지거든요.
예를 들어 키가 150㎝, 무게가 50㎏인 사람의 키가 10배(H) 늘어났다고 생각해 볼게요. 몸길이가 10배로 늘어나면 무게는 1000배(H³) 커져요. 이 사람의 키가 15m가 되면 몸무게는 무려 50t으로 늘어나게 되는 셈이에요. 반면 힘을 내는 근육의 힘은 100배(H²)만큼 커져요. 그럼 무게에 비해 로봇을 움직일 수 있는 힘이 10분의 1 정도밖에 되지 않아요. 작은 벼룩이 자신의 키의 60배 이상 높이를 뛰어오르
지만 사람은 그럴 수 없는 것도 이 때문이랍니다.

MIT 연구팀은 폴리우레탄 고무와 왁스를 섞은 신소재로 격자 모양의 구조물을 만들었다.
이 소재로 만든 로봇은 평소에는 단단하지만, 열을 받으면 부드럽게 휘거나 구부릴 수 있다.
따라서 과학자들은 좀더 가벼우면서도 튼튼한 소재를 로봇에 사용하고 있어요. 가능한 많은 부분을 가볍고 단단한 탄소섬유 복합재로 만들고, 튼튼하면서도 열에 잘 견뎌야 하는 부분만 티타늄을 사용하는 방법을 택하고 있답니다.