뱀은 사람이 쉽게 접근할 수 없는 좁은 틈새나 험준한 지형도 자유롭게 이동할 수 있어요. 그래서 로봇 공학자들은 뱀을 똑 닮은 로봇을 만들고자 고군분투하고 있지요. 뱀 로봇의 활약을 살펴보러 출발~!
재난 현장부터 우주까지
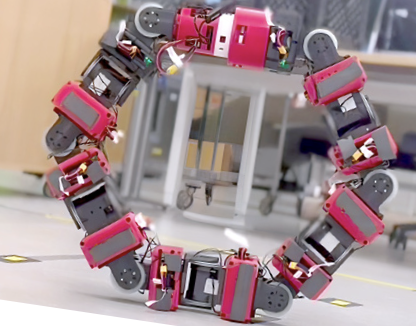
뱀 로봇은 12~20개의 관절로 이루어져 있어요. 각 관절이 독립적으로 회전하거나 구부러질 수 있기 때문에 다양한 방식으로 움직일 수 있지요. 하지만 현재 뱀 로봇은 실제 뱀만큼 유연하지는 않습니다. 뱀은 200~400개의 뼈와 근육을 사용해 움직이지만, 뱀 로봇은 기술적 어려움으로 관절 수를 무한정 늘릴 수 없기 때문이지요.
자연에서 뱀은 일상생활에서 쓰러진 나무, 바위 등 자신만큼 큰 장애물을 쉽게 기어오를 수 있습니다. 하지만 그동안 뱀 로봇은 평지를 이동하거나 나무를 오르는 수준에 머물렀어요. 2020년 미국 존스홉킨스대학교 기계공학과 연구팀은 왕뱀이 계단을 오르는 방식을 관찰해 다양한 높이의 계단을 빠르게 오를 수 있는 뱀 로봇을 설계했다고 밝혔어요.
왕뱀은 계단을 오를 때 자신의 몸을 크게 3개의 부분으로 나눠 이동했어요. 몸의 앞부분과 뒷부분은 물결 모양을 치며 꿈틀대지만, 가운데 부분은 뻣뻣한 직선 형태를 유지하면서 공중에 버티고 있었지요. 이를 모방해 만든 뱀 로봇은 처음에는 높은 계단에서 자주 흔들리고 뒤집혔어요. 연구팀은 로봇 뱀의 각 관절에 충격을 흡수할 수 있는 장비를 넣었습니다. 그 결과 뱀 로봇은 신체 길이의 38% 높이의 계단을 빠르고 안정적으로 오를 수 있었어요.

뱀 로봇은 바퀴나 다리가 달린 로봇과는 달리 좁은 틈을 통과할 수 있다는 장점이 있어요. 2017년 멕시코에서 규모 7.1의 지진이 발생했을 때 미국 카네기멜런대학교 하위 초셋 교수팀은 뱀 로봇을 투입했습니다. 무너진 건물 사이에서 생존자를 찾는 것이 목표였죠. 국립부경대학교 필드로보틱스 김성재 연구원은 “뱀 로봇이 스스로 주변 환경을 감지해 그에 맞는 움직임을 조절할 수 있다면 재난 현장에서 더 활약할 수 있을 것”이라고 말했습니다.
뱀 로봇은 재난 현장뿐만 아니라 우주로도 활동 반경을 넓힐 전망이에요. 2022년 미국 노스이스턴대학교 알리레자 라메자니 교수팀은 달 분화구 안을 탐사할 수 있는 뱀 로봇을 개발해 미국 항공우주국(NASA)의 빅 아이디어 챌린지에서 우승했어요. 2024년 NASA 제트추진연구소 연구팀은 얼음 지형을 자율적으로 탐사할 수 있는 뱀 로봇 EELS을 개발했습니다. 토성의 얼음 위성인 엔셀라두스 탐사를 목표로 설계된 로봇으로, 얼음 틈새로 들어가 그 밑 바다에 있을지도 모를 외계 생명체의 흔적을 찾을 계획이지요. 연구팀은 “기존의 탐사 로버가 지나갈 수 없는 빙하 내부의 미로 같은 공간을 누비며 임무를 수행할 수 있을 것”이라고 전했습니다.