세계 최초로 동물세포로 움직이는 가오리로봇이 개발됐다. 동물을 모방하는 생체모방공학과 세포를 빛으로 조절하는 광유전학 기술을 결합한 ‘작품’으로 평가 받았다. 과연 어떤 로봇일까.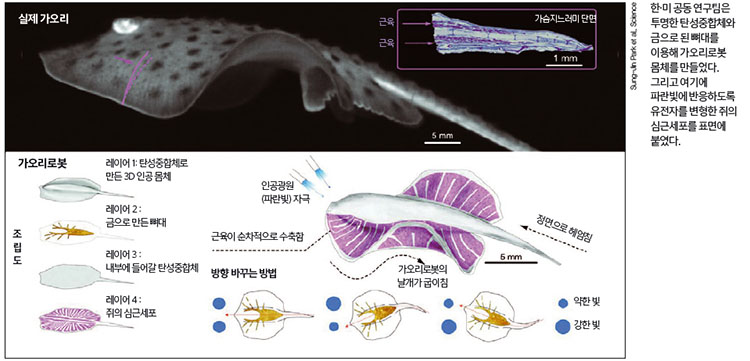
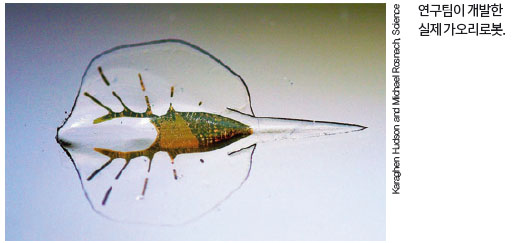
한·미 공동 연구팀이 동물세포로 움직이는 하이브리드 로봇을 최초로 개발했다. 미국 하버드대 공학 및 응용과학대 위스연구소 박성진 연구원과 케빈 파커 교수, 최정우 서강대 교수 등으로 구성된 공동 연구팀은 쥐의 심근세포를 이용해 헤엄치는 가오리를 본뜬 소프트로봇을 개발해 학술지 ‘사이언스’ 7월 8일자 표지논문으로 발표했다.
사이언스 보도에 따르면, 파커 교수는 딸과 함께 아쿠아리움에 갔다가 가오리가 헤엄치는 모습을 보고 아이디어를 얻었다. 가오리는 지느러미 근육을 수축했다가 펴면서 헤엄친다. 연구팀은 가오리를 해부해 근육의 배열과 근육이 움직이는 메커니즘을 분석했다. 그리고 가오리의 해부학적 구조를 본뜬 수많은 소프트로봇을 만들어 실험했다. 최종적으로 두 개의 평평한 실리콘 층 사이에 금으로 만든 골격을 넣은 샌드위치 형태의 로봇을 선택했다. 이렇게 만든 로봇은 길이가 16mm, 몸길이 21mm, 무게는 10mg으로 100원짜리 동전보다 작았다.
파커 교수는 로봇을 제어하는 방법도 딸에게서 영감을 얻었다. 딸이 걸음마를 배울 때 레이저포인터로 바닥을 비춰주던 기억을 떠올려 ‘빛에 반응하는 근육’ 아이디어를 얻었다. 연구팀은 쥐의 배아에서 심근세포를 채취한 뒤, 뇌의 전기 자극 대신 파란색 빛에 반응하도록 유전자를 변형했다. 그리고 앞서 실리콘으로 만든 가오리로봇에 이 유전자 변형 심근세포 20만 개를 부착했다.
가오리로봇은 파란색 빛을 비추자 지느러미를 움직였다. 빛을 쪼인 심근세포에서 근육을 수축․이완시키는 칼슘이 나오고, 이 자극이 다른 심근세포로 순차적으로 전달되면서 지느러미가 움직였다. 연구팀은 가오리로봇이 방향을 바꿀 수 있도록 두 개의 광원을 각각 좌우 지느러미에 비췄다(위 그림 참조). 빛을 빠르게 깜박거리면 지느러미의 펄럭임을 빠르게 할 수 있으며, 양쪽 지느러미의속도가 다르면 로봇의 방향을 돌릴 수 있었다. 최고속도는 1초당 3.2mm 였다.
과거에도 동물세포로 로봇을 움직이려는 시도는 있었지만, 속도와 방향까지 자유자재로 조종할 수는 없었다. 가오리로봇은 이점을 극복했다. 물론 갈 길이 멀다. 가오리로봇은 영양분이 풍부한 용액 속에서만 작동하며, 용액의 온도는 쥐의 체온 수준을 항상 유지해야 한다. 가오리로봇을 실제로 응용하려면 자연에서 접할 수 있는 다양한 환경에서 움직여야 한다.
로봇의 인공근육과 소프트로봇을 연구하고 있는 최혁렬 성균관대 기계공학부 교수는 “실제 동물처럼 스스로 에너지원을 섭취해서 움직이는 게 아니기 때문에 동력원 문제를 해결했다고 보긴 어렵다”며 “소프트로봇은 보통 힘이 약하고 움직임을 지속적으로 반복하지 못하는데, 가오리로봇 역시 이런 한계점을 넘어야 할 것”이라고 말했다.