“KAIST에 이상한 새가 나타났다고?”
KAIST 캠퍼스에 이상한 새가 출현했다는 소식을 접하고 KAIST 항공우주공학과를 찾았다. 이상한 새의 실체를 보여주겠다는 연구원들을 따라 오리연못 앞 잔디밭으로 갔다. 바퀴 달린 이동식 작업대엔 컴퓨터와 원격 조종기, 그리고 새 모양을 한 비행체가 실려 있다. 컴퓨터를 켜고 잠시 세팅을 하더니 새 모양의 비행체를 공중으로 힘껏 던진다. 비행체는 이내 날갯짓을 시작하더니 서서히 하늘로 솟구친다. 원격 조종기로 방향을 조작하자 비행체의 움직임도 변한다. 비행체의 움직임에 따라 모니터의 수치가 수시로 바뀐다. 시야에서 멀어지자 진짜 새와 구별이 안 갔다. 날갯짓은 물론 꼬리의 움직임까지 영락없는 새처럼 보인다. 그 때문일까. 인근 어은 동산에 서식하는 쇠백로 몇 마리가 비행체의 꽁무니를 뒤쫓는다.
새·곤충을 닮은 로봇 비행체
 캠퍼스에 출현한 이상한 새의 정체는 KAIST 항공우주공학과 ‘스마트 시스템 및 구조 연구실(SSSLAB)’ 한재흥 교수팀이 개발한 로봇새(SF-2)다. 한 교수팀은 새, 박쥐, 곤충 같은 자연계 동물들의 날갯짓 원리를 모방해 ‘생체 모방형 날갯짓 비행체’를 개발하고 있다.
캠퍼스에 출현한 이상한 새의 정체는 KAIST 항공우주공학과 ‘스마트 시스템 및 구조 연구실(SSSLAB)’ 한재흥 교수팀이 개발한 로봇새(SF-2)다. 한 교수팀은 새, 박쥐, 곤충 같은 자연계 동물들의 날갯짓 원리를 모방해 ‘생체 모방형 날갯짓 비행체’를 개발하고 있다.한 교수는 “새 날개의 유연성은 비행에 필요한 양력과 추력을 얻는 데 매우 중요하다”고 말했다. 한 교수는 이 점에 착안해 날개의 유연성 분포에 따른 날갯짓 비행체의 양력과 추력 특성 변화를 관찰했다. 새나 곤충은 단순한 날갯짓뿐 아니라 날개 비틀기(날개 뿌리를 중심으로 회전하는 운동), 날개 접기(날갯짓을 할 때 날개 관절을 중심으로 날개가 꺾였다 펴졌다 하는 운동)와 날개 단면의 곡률 변화가 결합된 움직임을 통해 양력과 추력을 얻는다. 연구팀은이런 특성들을 모사해 로봇새 날개를 설계했다.
한재흥 교수는 2005년부터 로봇새 연구를 시작했다. KAIST로 부임해 첫 번째 제자가 제안한 연구를 시작한 게 지금까지 이어졌다. 재미로 시작한 연구에 한 교수 자신도 점점 흥미를 느꼈다. 애초부터 새 모양의 플랫폼을 만든 건 아니다. 연구 목적에 따라 그 쓰임새와 모양이 달랐다. 순수하게 날려보는 게 목적인 플랫폼부터 센서나 카메라 같은 페이로드(탑재체) 장착용으로 만든 플랫폼도 있다.
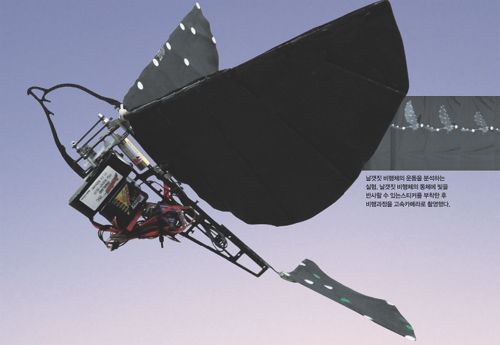
새 모양의 플랫폼을 갖추기 전까지는 풍동실험으로 비행 시뮬레이션을 대신했다. 로봇새 날개에 빛을 잘 반사할 수 있도록 수십 개의 원형 스티커를 붙여날갯짓을 할 때 어떻게 힘을 받아 날개가 변형되는지 실험했다.
한 교수는 현존하는 많은 소형 비행체가 풀어야 할 과제로 페이로드 탑재 능력을 꼽았다. 카메라나 비행 데이터 측정 장치 같은 페이로드의 탑재 능력에 따라 비행체의 임무가 확장되기 때문이다. 하지만 비행체 무게 이외의 추가적인 무게를 감당하는 게 아직까지는 과제로 남아 있다.
그는 “새가 먹이를 낚아채면 먹이가 새 전체 무게의 20~30%에 달해도 상황에 맞게 비행모드를 바꿔서 날 수 있다. 박쥐도 마찬가지다. 임신을 해서 새끼가 뱃속에 있어도 여전히 잘 날고 있다”고 설명했다.

앵무새 꼬리에서 비행 안정성 해법 찾아
오래전부터 동물학자들이 조류와 곤충의 움직임을 관찰해 왔다. 주로 해부학적이거나 운동학적 구조를 연구했다. 하지만 하늘을 날고 싶어 하는 인류의 욕망은 동물학자들의 연구를 바탕으로 생체를 모방하는 날갯짓 형태로 이뤄지지 못했다. 최초로 동력 비행에 성공한 라이트 형제는 현재 우리가 보는 형태의 비행체 구조로 비행실험을 했다.
최초의 동력 비행이 성공한 이후 100년이 지난 최근에서야 고성능 초소형 모터와 전자 기술의 발전으로 새처럼 날갯짓해 날아가는 생체 모방형 비행 기술에 관심을 두기 시작했다.
예를 들어 조류는 날개 근육과 뼈 관절을 비행 시 조절해 복잡한 형태의 날갯짓 운동을 할 수 있다. 주 날개에서는 비행에 필요한 양력과 추력을 발생시키고 꼬리를 통해서 비행 안정성을 유지한다. 반면 벌, 잠자리와 같은 곤충은 좀 다르다. 날개에 근육이 없는 대신, 그물막 형태의 얇고 유연한 날개가 몸통에 부착돼 몸통 자체의 진동으로 날개를 떨어서 비행을 한다. 또한 곤충은 새와는 달리 꼬리가 없기 때문에 날개를 8자 형태로 움직여서 비행 안정성을 유지한다. 한 교수팀은 이런 복잡한 비행원리를 모두 흉내 내기보다는 각 동물의 특징적인 비행원리를 소형 비행체에 적용했다.
날갯짓 비행체는 비행한다고 표현하지 않고 ‘유영’한다고 표현한다. 그만큼 비행체를 원하는 방향으로 움직이는 게 어렵다. 한 교수는 이런 어려움을 담은 동영상을 보여줬다. 한쪽은 실제 독수리에 웹캠을 설치해 찍은 영상이고, 다른 한쪽은 로봇새에 웹캠을 설치해 찍은 비행 영상이다. 결과는 참담했다. 독수리가 촬영한 영상은 흔들림이 거의 없는 반면, 로봇새가 촬영한 영상은 흔들림이 심해 사물을 구분하기 어려웠다.
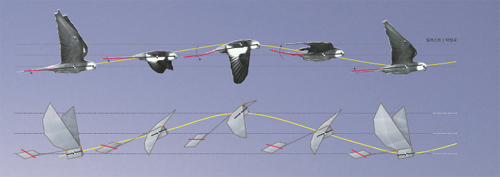
이는 하강할 때 드는 날갯짓의 힘과 상승할 때 드는 날갯짓의 힘 간에 발생하는 차이 때문이다. 이런 문제점을 고민하던 한 교수는 한 논문에서 고속카메라로 찍은 앵무새 영상을 접했다. 앵무새의 날갯짓을 옆에서 찍은 영상을 보니 몸체가 위·아래로 흔들리긴 해도 그 각도가 크지 않았다. 앵무새는 또 특이하게 날갯짓과 동시에 꼬리를 많이 흔들었다. 이 장면을 본 한 교수는 로봇새도 주 날개의 날갯짓에 일정한 꼬리 흔들림을 연결하면 효과가 있지 않을까 생각했다.
한 교수팀은 자체 개발한 ‘날갯짓 비행체 통합 비행 시뮬레이션 소프트웨어’를 이용해 날개의 유연성, 날개 운동에 따라 생성되는 공기역학적 힘, 꼬리날개 움직임 등을 고려해 날갯짓 비행체의 비행 궤적을 계산했다.
앵무새와 같은 자연계의 비행체는 날갯짓에 따라 주기적으로 꼬리날개를 움직여, 비행 시 고도 변화가 적고 안정된 시야를 확보하기 위해 비행자세각이 일정하게 유지된다는 사실을 알아냈다. 기존에 개발된 날갯짓 비행체는 상대적으로 고도 변화가 크고, 비행자세각의 변화가 크다. 연구팀의 로봇새 SF-2는 꼬리날개의 운동을 통해 안정적 시야를 확보하면서 비행할 수 있게 됐다. 바람이 불더라도 어느 정도 안정성을 유지하며 비행할 수 있는 것으로 확인됐다.
군사작전이나 화성탐사에 활용 가능
로봇새 비행체는 고정익 비행체와 회전익 비행체의 장점을 모두 갖췄다. 고정익 비행체인 정찰기는 일단 저속으로 비행하는 게 어렵고, 조그마한 틈으로 들어가지 못한다. 회전익 비행체인 헬기도 저속 비행은 가능하지만 대신 소음이 심하다. 날갯짓을 하는 비행체는 형태가 큰 경우 비효율적이지만 작은 크기일 경우 저속 비행에 가장 효과적이다. 새와 같은 형태를 갖고 있기 때문에 실제 군사작전에 투입될 때 완벽한 위장이 가능하다.
한 교수는 아직까지 정찰임무나 광역감시는 고고도 정찰기를 사용하지만 1km 반경에서 벌어지는 시가전이나 테러임무에는 조만간 날갯짓 비행체를 적용할 수 있는 것으로 내다봤다. 그는 “날갯짓 비행체는 움직이면 에너지가 소모되므로 정보를 전달할 때 건물 외벽에 붙어서 중계하는 게 좋을 것”이라고 설명했다.
기존의 화성 탐사는 바퀴가 달린 탐사 로봇으로 수행됐기 때문에 탐색 영역이 매우 한정됐다. 비행체로 탐사할 경우 좀 더 넓은 범위에서 임무를 수행을 할 수 있는데, 문제는 화성의 대기 밀도가 지구의 대기 밀도보다 80배 정도 작기 때문에 지구 대기 상에서 설계된 비행체가 화성에서 날기가 어렵다. 한 교수는 “대기의 밀도, 비행 속도, 비행체 크기가 작은 경우 항공우주공학에서는 저 레이놀즈 수 영역의 공기역학에 지배를 받는다”며 “저 레이놀즈 수 영역에서 효율적인 비행 방식으로 알려진 것이 바로 날갯짓 비행 형태”라고 설명했다.

날갯짓 비행체는 기본적으로 플랫폼과 페이로드에 대한 연구가 필요하지만 사용자와 비행체 간 원활한 교신 문제도 해결할 과제다. 실전에 배치하려면 원하는 방향으로 보낼 수 있는 조종성이 그만큼 중요하기 때문이다. 한 교수는 “궁극적으로 사용자는 고급 명령만 내리는 방향으로 로봇새를 연구하고 있다”며 “사용자가 아이폰 같은 휴대기기로 지도를 보면서 명령을 내릴 수준이 돼야 한다”고 말했다.