대형 건설현장에 가면 커다란 기중기와 포크레인이 마치 로봇처럼 움직이고 있는 것을 본다. 이 장비들이 자율성(지능)을 갖추고 초월적 이동성(뛰고, 날고, 땅속으로 파고들어 갈 수 있는 능력)을 확보하면 특정한 형태의 거대로봇이 될 것이다.
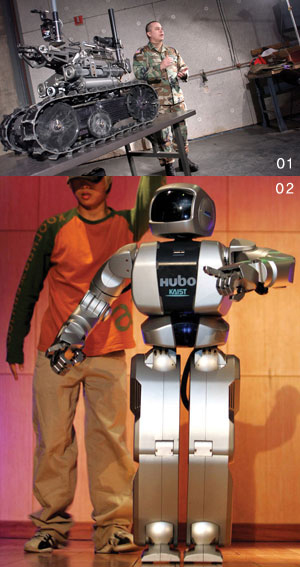
전투 현장에서는 이미 많은 무인 무기가 사용되고 있으며 곧 무인 탱크와 무인 자동차가 전장을 누빌 것이다. 이미 현대전은 로봇과 컴퓨터를 이용한 싸움이라 볼 수 있다. 앞으로 보병의 임무도 로봇이 대체할 것이다. 과연 이들을 압도할 수 있는 궁극적인 형태의 거대로봇은 구현 가능하며 꼭 필요한 것인가.
거대로봇의 전투
거대로봇의 장점은 로봇이 낼 수 있는 어마어마한 힘이다. 인간이 우주 식민지를 건설하고 깊은 해저나 지하에 도시를 건설하는 시대가 오면 인간의 노동력을 대신해 구조물을 지을 거대로봇이 필요할 것이다. 또 생화학전이나 핵전쟁에서 엄청난 파괴력을 바탕으로 다양한 작전을 펼칠 수 있는 거대로봇은 전략적으로나 전술적으로 높은 평가를 받을 것이다. 이런 시대가 오면 거대로봇 간의 전투도 일상 뉴스가 되지 않을까.
이런 필요성 때문에 언젠가는 거대로봇이 출현할 날이 오리라고 기대해 본다. 지금까지 등장한 가장 큰 로봇은 1985년 미국 오하이오주립대의 맥기 교수가 개발한 ASV라는 로봇이었다. 6개의 발이 달려 있었으며 무게는 3t, 사람이 직접 타고 조종했다. 당초 군사 목적으로 개발했으나 너무 크고 움직임이 느려 실용화엔 실패했다.
현재 한국과학기술원(KAIST)에서 개발한 휴보 FX-1은 자체중량이 150kg이며 무게 100kg인 사람을 태우고 시속 1.5km까지 걸을 수 있다. 사람을 태우면 키가 약 2m 정도 된다.
머지 않은 미래에 1~2t 정도의 실용적인 대형 로봇이 등장해 건설, 군사용, 위험 작업 등에 쓰일 가능성이 있다. 다만 현대의 로봇 연구는 기술의 한계와 시장의 요구에 맞춰 생활 공간에서 사람과 상호작용이 편리한 중소형 로봇에 집중돼 있는 실정이다. 그렇다면 거대로봇을 구현하기 어려운 점은 무엇이며 필요한 기술은 무엇일까.
거대로봇은 괴로워
사람의 키와 덩치가 지금의 10배로 커진다면 무슨 일이 일어날까 생각해 보자. 사람이 1/10로 줄어든다면 어떤 현상이 일어날까. 벼룩은 자기 키보다 60배 이상을 뛰어 오를 수 있으며 개미는 자신 몸무게의 수백 배 이상을 들어 올릴 수 있다. 왜 사람이나 다른 동물들은 그렇게 할 수 없을까.
이 질문에 대답하려면 먼저 크기와 무게에 따른 힘의 관계를 생각해 봐야 한다. 몸집이 커지면 질량은 키의 세제곱에 비례해 증가한다. 한편 힘을 내는 근육의 단면적은 키의 제곱만큼 커지는데 그친다. 예를 들어 1mm 크기의 벼룩을 1000배로 키워 키를 1m로 만들면 무게는 ${10}^{9}$배로 증가하나 근력은 ${10}^{6}$배 정도만 늘어나게 된다. 다시 말해 체중에 대해 상대적으로 힘이 1/1000로 줄어드는 것이다. 이렇게 되면 벼룩은 자기 몸무게도 지탱 못할 정도로 비대한 단백질 덩어리에 불과할 것이다. 사람도 마찬가지다. 키가 줄어들면 상대적으로 힘이 매우 세져서 자기 몸무게의 몇 배를 들어 올릴 수 있게 되지만 거인이 되면 골격이나 근육이 자기 무게도 지탱하지 못할 정도로 허약해진다.
로봇도 매우 유사하다. 먼저 근육에 해당되는 구동원에 대해 살펴보자. 로봇의 크기가 H만큼 커지면 무게는${H}^{3}$이 되고 이를 움직이기 위한 관절 모멘트(힘×거리)는 ${H}^{4}$가 된다. 여기에 만약 로봇이 크기에 비례해 움직이는 속도도 증가하기 원한다면 필요한 단위시간당 에너지는 ${H}^{5}$가 될 것이다. 즉 키(H)가 커지면 체중 증가량 보다 최소 H에서 ${H}^{2}$배 사이의 구동력이 더 필요하다.
로봇을 지탱하는 구조물(뼈대)에서도 크기에 따른 문제가 예상된다. 구조물의 수직방향 내구력은 ${H}^{2}$에 비례하고 굽힘 강성은 H에 비례해 증가하는데 그친다. 즉 로봇의 크기가 커지면 같은 재료를 사용한다고 했을 때 수평 방향으로 견디는 힘이 확 줄어든다. 따라서 거대로봇의 뼈대는 소형 로봇보다 훨씬 더 두꺼워야 한다.
거대로봇을 설계하려면 소형 로봇에 사용되는 일반적인 방법을 적용할 수 없고 현재와 미래 기술이 접목된 매우 진보적인 방법을 동원해야 한다.
먼저 재질의 무게를 획기적으로 줄이는 것이 급선무이다. 나노 기술을 이용한 다공성 재질과 초고강도섬유 복합재료 또는 초합금 등을 채택해 재료의 무게(비중)를 1/5 이하로 줄인다. 구조적으로는 강성 위주의 설계보다 우주왕복선의 로봇팔과 같은 유연한 구조를 갖도록 한다. 유연한 구조체를 제대로 움직이려면 자가학습 능력이 있는 인공지능을 갖추는 것이 필수이다. 필요하면 구조체에 마이크로 구동기를 삽입해 구조물의 강성과 감쇄를 증가시킬 수 있는 스마트 구조물을 도입하도록 한다.

불가능에 도전하다
거대로봇을 만들려면 질량을 효과적으로 배치해야 한다. 몸체로부터 상대적으로 큰 운동을 하는 팔과 다리를 효과적으로 움직이고 이런 운동에서 나오는 관성력을 최소로 줄이려면 동력원과 구동기 등 무거운 부품은 운동량이 적은 가슴이나 복부 안에 두도록 한다.
거대로봇구동에는 많은 에너지가 소모된다. 50t 정도의 로봇을 구동하려면 5000마력 이상의 파워가 필요하리라 본다. 이 파워를 내연기관이나 연료전지로 공급할 경우 너무 많은 연료가 소모되고 연료무게, 소음과 배기도 큰 문제가 된다. 그러므로 소형원자로, 핵융합 등 새로운 에너지 기술이 이용될 것이다. 거대로봇의 겉모습은 어떻게 바뀔까. 먼저 이동성에 근거해 바퀴굴림형과 다족보행형으로 나눌 수 있다. 대부분은 바퀴형으로 개발될 것이다. 그러나 바퀴로 접근이 어려운 45도 이상의 경사와 절벽 오르기 등의 목적으로는 다족보행형이 유리하다. 몸체는 방호와 공격이 쉽도록 다양한 모습이 등장할 것이다.
현재의 기술로는 크기 약 6m, 무게 6t 정도의 2족 보행 로봇이 가능할 것이다. 구동원으로는 유압장치를, 동력원으로는 300마력 디젤기관을 사용하면 시속 10km의 속도를 낼 수 있다. 4~5년 내에 더욱 빠른 걸음, 비포장 험로 보행, 급경사 오르기가 가능할 것이다.

태권V 2006
이런 모습의 ‘2006년 태권V’가 날 수 있을까? 현재 수직 이착륙이 가능한 영국의 해리어 전투기(자체중량 6t, 최대 무게 11t)는 추력(들어올리는 힘)이 11t인 제트엔진을 탑재하고 있다. 해리어의 제트 엔진을 로봇에 달면 수직 이착륙과 자유 비행이 가능하리라 본다.
거대로봇의 설계에서 가장 신경 쓸 부분은 무게와 강성이다. 강성을 증가시키면 무게가 늘어나고 무게를 줄이려 하면 강성이 줄어들어 로봇이 허약해진다. 최대한 강성을 유지하며 무게를 줄일 수 있는 최적 설계기법을 사용해야 한다.
로봇의 재질은 티타늄, 강철, 알루미늄, 탄소 복합재료 등을 사용한다. 구조물은 탄소섬유 복합재료와 티타늄, 내부 부품과 연결부 등은 두랄루민과 강철을 기본으로 한다. 무게를 줄이기 위해 가능한 많은 부분을 탄소섬유 복합재로 만들고 그 다음은 두랄루민으로 한다. 강도와 내열이 필요한 부분은 티타늄을 쓰고 가능한 강철의 사용을 줄인다.
로봇은 하체는 2족 보행형으로(태권V니까!) 하고 상체는 무기 종류와 용도에 따라 맞춤형으로 설계하는 것이 바람직하다. 로봇의 한 팔은 공격용으로 다른 팔은 방어용으로 한다. 즉 한쪽 팔은 로켓포, 기관총 등의 무기를 탑재한 상태에서 자유 자재로 공격이 가능하게 한다.
로봇의 전신을 방탄으로 설계하면 무게와 부피가 지나치게 커지기 때문에 다른 팔은 공격을 막을 수 있는 방호, 방탄 시스템으로 활용하는 것이 좋다. 방호용 팔은 튼튼한 재질로 돼 있어 근거리에서는 이를 휘둘러 공격할 수도 있다.
로봇의 머리는 되도록 작게 만들어 레이더, 통신, 적외선 카메라, 레이저 감시장치 등을 설치하고 로봇의 무게 중심에 해당하는 조종실은 가슴이나 복부에 둔다. 안구 센서나 모션 센서를 장착해 조종사의 시선과 손가락의 움직임에 따라 운전하도록 해 가능한 한 운전자의 정신적, 육체적 피로를 덜도록 한다. 이런 모습이 현실 가능한 ‘2006년 태권V’가 될 것이다.
▼관련기사를 계속 보시려면?
태극전사 로보트 태권V
1. 반갑다, 태권로보트야!!
로봇을 통해 휴머니즘 그리고파
2. 거대로봇 가능할까
3. 태권V 10대기술
4. 한반도 지키는 태권 거인