꿀록 탐정과 개코 조수는 휴가차 그리스 코린토스로 떠났어요.
“탐정님, 이것 좀 봐요! 이게 말로만 듣던 그릭요거트인가 봐요!”
그릭요거트를 맛있게 먹으며 길을 걷던 꿀록 탐정과 개코 조수의 귓가에 ‘드르륵’ 하며 무거운 물체를 끄는 소리가 들렸어요. 이어 누군가가 애타게 부르는 소리가 들려왔죠.
“여보시오, 탐정 양반! 제발 나 좀 도와주시오!”

동화마을에 무슨 일이?
시시포스의 끝없는 형벌
“마침 잘 오셨습니다. 나는 수십 년 동안 돌을 날랐지요. 이젠 너무 지쳤어요.”
기진맥진한 표정과 간절한 눈빛으로 다급하게 사연을 말하는 아저씨를 보고 꿀록 탐정은 고개를 끄덕이며 말했어요.
“한때 이곳 코린토스의 왕이었던 시시포스군요. 신들을 기만하고 세상의 질서를 어지럽혔다는 죄로 신들의 왕인 제우스로부터 영원한 형벌을 받고 있죠? 죄를 지은 만큼 그에 마땅한 죗값을 치르셔야죠!”
꿀록 탐정이 차갑게 대하자 시시포스는 억울하다는 듯이 말했어요.
“물론 제가 저를 찾아온 죽음의 신 타나토스를 속이고 지하실에 가둔 건 사실입니다. 죽음의 신이 사라져 죽음이 없어진 세상이 혼란에 빠지기도 했죠. 그래서 제우스는 저 때문에 피해를 본 여러 신들의 요청을 받아들여, 제게 죽을 때까지 바위를 산으로 나르는 벌을 내렸습니다. 하지만 이 형벌을 받기 시작한 지 수십 년도 넘게 지났어요. 이제 더는 체력이 버티질 못한다고요.”
시시포스는 거대한 바위로 앞을 막아서며 자신을 도와줄 때까지는 비켜주지 않을 심산이었어요.
“음, 나보다 10배는 더 큰 바위를 내가 대신 옮겨줄 수는 없을 것 같고….”
거대한 바위를 쳐다보며 고민하던 꿀록 탐정의 머릿속에 아이디어 하나가 번뜩였어요.
“아하! 이 바위를 더 쉽게 옮길 수 있게 도와드리면 어떨까요?”


통합과학
개념 이해하기
마찰력을 줄여라!
마찰력은 접촉한 두 물체의 운동을 방해하는 힘입니다. 시시포스는 바위를 밀어 앞으로 나아가려고 했지만, 바위와 땅 사이에서 발생한 마찰력이 진행 반대 방향으로 작용하여 이동을 방해했던 거죠.
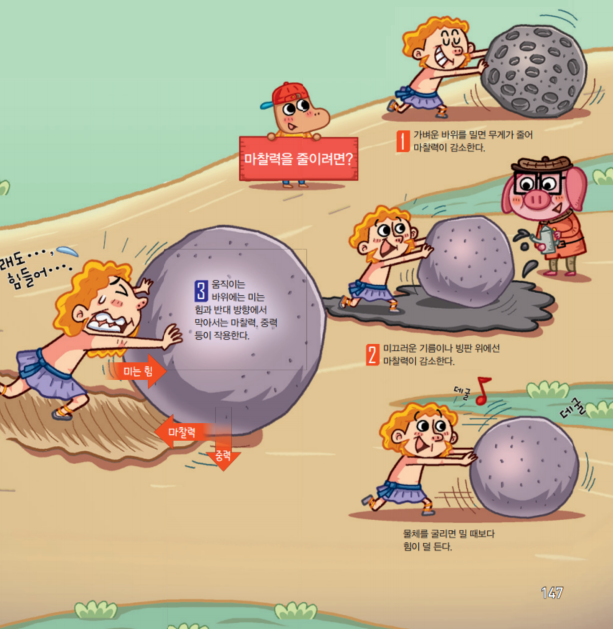
바위를 밀 때 마찰력의 크기는 접촉면의 성질과 물체의 무게에 따라 달라져요. 접촉면이 거칠거나 뻑뻑할수록 마찰력이 크며, 평평하고 매끈할수록 마찰력은 작아집니다. 미끌미끌한 유리 위에서는 마찰력이 작고 뻑뻑한 고무에서는 대체로 마찰력이 크지요.
또한, 물체가 무거울수록 마찰력이 커집니다. 교실에서 의자를 밀 때보다 무거운 책상을 밀 때가 힘이 더 많이 드는 것처럼요.
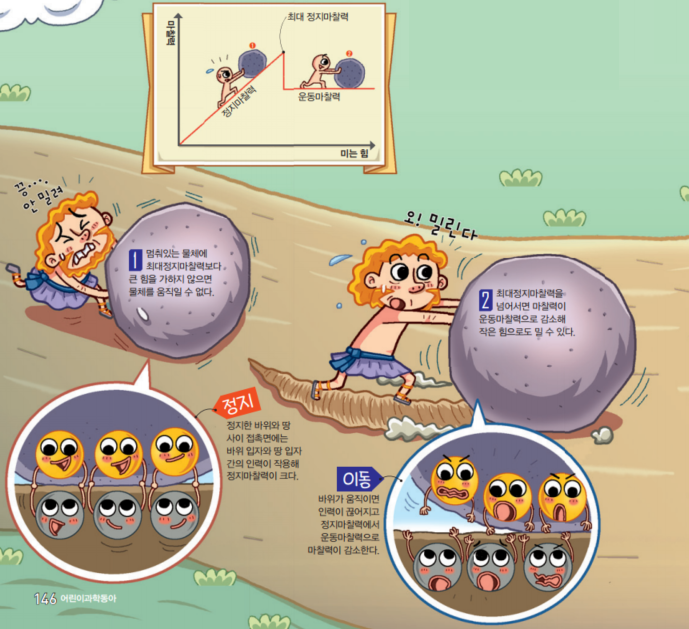
마찰력은 멈춰 있을 때는 ‘정지마찰력’, 움직일 때는 ‘운동마찰력’으로 구분돼요. 정지마찰력의 최댓값인 ‘최대정지마찰력’을 넘어서는 힘을 가해야 비로소 물체를 움직일 수 있어요. 이때 최대정지마찰력은 운동마찰력보다 큽니다. 주차된 자동차를 밀 때, 처음엔 잘 안 밀리다가 어느 순간 자동차가 움직인 이후엔 힘을 덜 들이고 밀 수 있는 것도 이 때문이죠.
최대정지마찰력이 운동마찰력보다 큰 이유는 입자 간 끌어당기는 힘인 인력 때문이에요. 물체와 바닥의 접촉면을 들여다보면 물체와 바닥 사이의 입자가 전자를 공유하며 인력이 발생합니다. 정지 상태에선 두 물체 간 인력이 충분히 발생하기 때문에 마찰력이 많이 생기죠. 물체가 최대정지마찰력을 넘어서 움직이는 순간 접촉면의 인력이 끊어지고, 계속해서 움직이면 인력이 부족해 마찰력이 줄어들어요.
마찰력을 줄이기 위해선 기름이나 얼음 등의 미끄러운 표면 위에서 물체를 미는 방법이 있어요. 물체의 무게를 줄여도 마찰력을 감소시킬 수 있죠. 또한, 물체가 둥글다면 미는 것보다 굴리는 편이 더욱 수월합니다.
마찰력은 운동의 진행을 방해하는 힘이지만 꼭 필요한 힘이기도 합니다. 우리가 미끌어지지 않고 걸어갈 수 있는 것도, 지우개로 틀린 글씨를 지울 수 있는 일도 모두 물체를 잡아주는 마찰력 덕분이에요.
통합과학 넓히기
미끄러운 물체도 척척, 도마뱀 로봇손 등장!
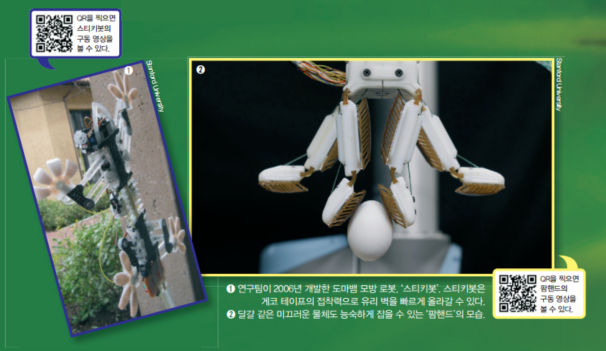
작년 12월, 미국 스탠포드대학교의 생체모방조작연구소가 도마뱀 발바닥을 모방한 로봇 손 ‘팜핸드’를 공개했습니다. 팜핸드는 영상에서 미끄러운 물체도 능숙하게 집고 옮기는 모습을 보여줍니다.
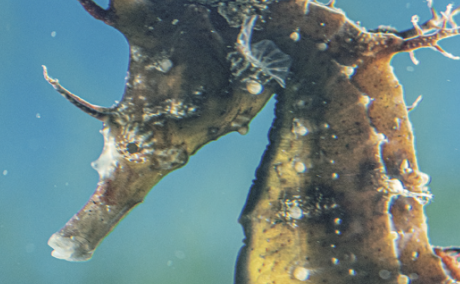
지난 2006년, 연구팀은 도마뱀붙이(게코)의 발가락 구조에서 영감을 얻어 접착 물질 없는 ‘게코 테이프’를 만들었어요. 도마뱀붙이의 발바닥을 자세히 들여다보면 길이 50∼100μm(마이크로미터), 지름 5∼10μm의 강모●가 수백만 개 배열돼 있습니다. 이렇게 엄청난 수의 강모는 도마뱀붙이 발바닥의 표면적을 증가시키면서 발바닥과 접촉면 사이의 인력을 크게 만듭니다. 덕분에 도마뱀붙이는 미끄러운 벽면에도 쉽게 달라붙을 수 있어요. 연구팀은 인공 섬모를 이용해 도마뱀붙이의 발바닥 구조를 따라한 게코 테이프를 만든 거죠.
생물을 본떠 만든 기술을 생체모방이라고 해요. 2006년, 연구팀은 게코 테이프를 활용해 생체모방 로봇 ‘스티키봇’을 만들었습니다. 스티키봇 발바닥 섬모의 끝부분을 한 방향만 보게끔 경사 처리하면 표면적이 증가해 마찰력이 엄청나게 커져요. 그 때문에 스티키봇은 유리 벽에서도 떨어지지 않고 지탱할 수 있죠.
이후 연구팀은 게코 테이프의 성능을 꾸준히 향상시키고 로봇 손 관절의 미세한 조작 능력을 연구하여 최근 팜핸드를 완성시켰습니다. 기존의 로봇 손은 물체를 집을 때 강약 조절을 하기 힘들었어요. 그 때문에 로봇 손은 종종 물체를 망가뜨렸죠. 반면 팜핸드는 게코 테이프의 접착력 덕분에 적은 힘으로도 달걀, 사과 등 강도가 약한 물체를 훼손하지 않고 여러 각도에서 잡을 수 있습니다.
윌슨 루오톨로 박사 과정 연구원은 “팜핸드의 미세한 힘 조절을 활용한다면 농장에서 로봇 손으로 과일이 다치지 않게 수확하는 등의 도움이 될 것”이라고 말했답니다.
●강모: 절지동물이나 파충류 등의 뻣뻣하고 억센 털.
에필로그
기존의 바위와 크기는 같지만, 구멍이 숭숭 뚫려 가벼운 바위를 가져온 시시포스. 이어서 바닥에 기름칠을 하고 바위를 밀어 봅니다.
“아니, 이렇게 편할 수가 있다니?!”
시시포스는 마찰력이 한껏 약해졌음을 느끼자 흥겹게 바위를 밀며 나아갔어요. 바로 그때, 하늘에서 벼락 같은 목소리가 들려옵니다.
“꼼수를 부리면 쓰나, 시시포스!”
모든 모습을 지켜보던 제우스가 길바닥과 시시포스의 돌을 원상복구 시켰어요.
그 모습을 지켜보던 꿀록 탐정이 개코 조수에게 속삭였어요.
“역시 사람은 정직하게 살아야 해~.”


개념 퀴즈
물체가 움직일 때 발생하는 마찰력은 정지한 상태의 마찰력보다 항상 크다.
( O , X )