로봇이 물건을 집는 장비를 ‘그리퍼(Gripper)’라고 한다. 조규진 서울대 공대 기계공학부 교수팀이 사람의 손처럼 여러 물체를 한 번에 잡을 수 있는 그리퍼를 개발했다. 이 연구는 국제학술지 ‘사이언스 로보틱스’ 2024년 12월 12일 자에 실렸다. doi: 10.1126/scirobotics.ado3939
로봇 공학에서는 그리퍼를 만드는 연구가 활발하다. 하지만 사람의 손처럼 물건을 자연스럽게 집기는 쉽지 않다. 물건을 부서뜨리지 않으면서 들어 올릴 수 있는 적당한 힘을 가하기가 어렵고, 들 수 있는 양에도 한계가 있다. 그래서 거미 다리나 문어의 빨판을 응용하는 등 다양한 방식으로 그리퍼 개발이 시도됐다.
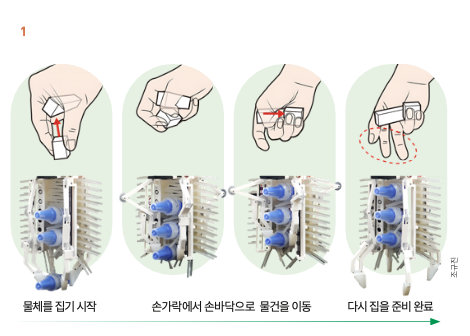
조 교수팀은 사람의 손에서 아이디어를 얻어 한 번에 여러 물체를 옮길 수 있는 그리퍼를 제작했다. 한 손으로 지우개 2개를 주워 옮긴다고 생각해 보자. 그러면 먼저 손가락으로 지우개 하나를 잡아 손바닥으로 쥐고, 다시 빈 손가락으로 지우개를 잡는다.
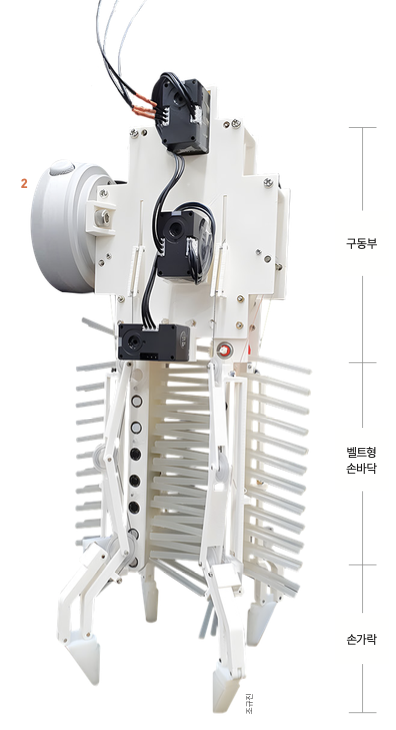
이 동작을 구현하기 위해 교수팀은 물체를 집는 ‘손가락’과 물체를 저장하는 ‘손바닥’을 분리한 그리퍼, ‘모그립(MOGrip)’을 만들었다. 모그립의 손가락은 4개로, 기존의 그리퍼처럼 물건을 집을 수 있다. 손가락 위에는 유연하고 긴 털이 컨베이어 벨트처럼 배열된 손바닥이 있다. 손가락이 물건을 잡고 손바닥으로 옮기면 털이 움직이면서 물건을 저장한다.
모그립은 다양한 형태의 물건이 쌓여 있는 ‘비정형 환경’에서 물건을 옮길 때 특히 효과적이다. 실제로 연구팀은 모그립과 기존 그리퍼가 8개의 물체를 옮기는 실험을 진행해 그 성능을 입증했다. 모그립은 단 두 번의 왕복만으로 8개 물체를 옮길 수 있었다. 한 번에 하나의 물건을 집고 옮기는 기존 그리퍼에 비해 시간은 34%, 이동 거리는 71% 줄일 수 있었다.
연구팀은 보도자료를 통해 “다품종 소량생산, 여러 물건이 어지럽게 쌓인 ‘빈 피킹’ 등 자동화가 이뤄지지 않은 다양한 공정에 이 기술을 적용할 수 있는지 검토 중”이라 밝혔다. 연구팀은 앞으로 벨트형 손바닥 디자인의 최적화 연구를 추가로 진행할 계획이다.