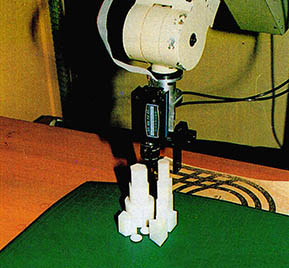
똑똑한 로봇이 하나 태어났다. 이름은 KAIROS(KAIST Advanced Industrial Robot System), 개발자는 과기원 변증남교수(전자공학과)와 제어시스템연구팀(김경진 장원 이채우)인데 팔에 눈이 달렸다는 특징을 가지고 있다.
그렇다면 KAIROS를 왜 똑똑하다고 할까? 그 이유는 과거의 로봇이 어떤 수준이었는지를 밝히면 금방 드러난다.
책상 위에 컵이 하나 있다고 치자. 종래의 로봇에게 이 컵을 들어올리라고 하려면 여러 단계의 명령을 해야 했다. 예컨대 좌로 10cm 가라. 밑으로 5cm가라. 물체를 잡아라. 위로 5cm 가라, 우로 10cm 가라 등등.
또 컵 대신에 상자를 옮기려면 전혀 새로운 명령을 구성, 로봇에게 입력시켜야 했다. 외부 상황의 변화를 로봇이 스스로 눈치채지 못하기 때문이었다.
그래서 외부 환경의 변화를 인식, 알아서 적응할 수 있는 로봇이 필요하게 되었다. 또 사람에게 주문하듯이 간편하게 로봇에게 명령할 수 있는 시스팀이 절실해졌다. 예를 들면 일단 컵을 가르쳐주고, '컵을 잡아라'하고 간단히 지시하면 되는 로봇의 출현이 요청된 것.
이렇게 지시하려면 로봇에게 우선 눈을 주어야 한다. KAIROS 이전에도 눈(카메라)을 가진 로봇이 국내에 있었다. 천정에 카메라를 고정시켜 놓은 로봇이었다. 따라서 카메라와 물체와의 거리가 멀었기 때문에 시력이 나쁠 수밖에 없었다. 게다가 더 결정적인 결점은 로봇의 팔과 카메라가 일직선 상에 있을 때, 카메라가 팔에 가려 아예 장님이 돼버리는 것.
KAIROS는 이같은 약점을 보완해주는 로봇으로 개발됐다.
KIAROS의 팔 끝에는 40˚~45˚를 볼 수 있는 카메라가 붙어있다. 그래서 손과 카메라가 동시에 움직인다. 이를 통해 반경 1m안에 있는 물체를 직접 보고, 스스로 알아서 작업할 수 있는 능력을 갖추게 된 것.
그래서 작업을 하면서 에러(error)가 나온 것은 교정할 수 있게 되었다. 즉 피드 백(feed back)이 가능해졌다는 얘기다.
가장 까다로운 거리 계산
그렇다면 로봇의 팔끝에 달린 카메라는 어떤 원리로 물체와의 거리를 계산해 낼까?
여기에는 광학(光學)의 기본원리가 적용된다. 예를 들어 가까이 있는 사람의 얼굴과 멀리 있는 산을 매우 근접한 두 지점에서 사진을 찍는다고 하자. 그러면 사진의 화면에 비친 사람의 얼굴은 많이 움직여 보일 것이다. 하지만 산을 찍은 두 사진은 움직임이 상대적으로 적어 보일 게 분명하다. 이같은 현상을 이용, 로봇의 거리측정이 이뤄진다. 따라서 로봇위 팔에 설치된 카메라는 2장 이상 사진을 찍어야 거리를 계산할 수 있다. 여러장 찍을수록 거리측정은 더 정확해진다. 2장 찍을 때의 오차는 cm범위 안, 앞으로 mm 수준으로 오차를 줄여나갈 계획이다.
아직 연구중이지만 카메라 2대를 동시에 로봇의 팔에 설치, 거리를 파악하는 방법도 있다. 측정하고자 하는 물체에 초음파를 쏘아 돌아오는 시간을 계산, 거리를 알아낸다는 것.
KAIROS의 또 하나의 장점은 소프트웨어가 참신하다는데 있다. 인공지능, 제5세대 컴퓨터용으로 개발된 로봇언어인 프롤로그(prolog)언어를 사용, 명령체계를 단순화시킨 것이다.
하지만 동시에 아직 많은 문제점도 안고 있다.
KAIROS 개발에 참여한 정원연구원은 "눈기능을 더 개선해야 한다. 거리 계산속도도 더 빨라져야 하며 좀더 복잡한 물체도 파악해내야 한다"고 진단한다.
현재의 거리계산속도는 10분의 1초인데, 앞으로 기능이 더 많아질 것에 대비, 속도를 높이는 일을 착수해야 한다는 것.
KAIROS를 완성한 후 변증남 박사는 "앞으론 사과 따는 로봇도 개발할 수 있어야 한다"며 강한 의욕을 엿보였다.