미국 에너지부 산하 북서태평양국립연구소가 도시의 교통 혼잡을 분석하는 새로운 기계학습 알고리듬을 개발했습니다. 그동안 교통공학자는 공공데이터로 제공되는 정보를 통해 도로교통 상황을 파악했지만, 수집할 수 있는 정보가 한정돼 있어 정확한 실시간 추정은 어려웠습니다.
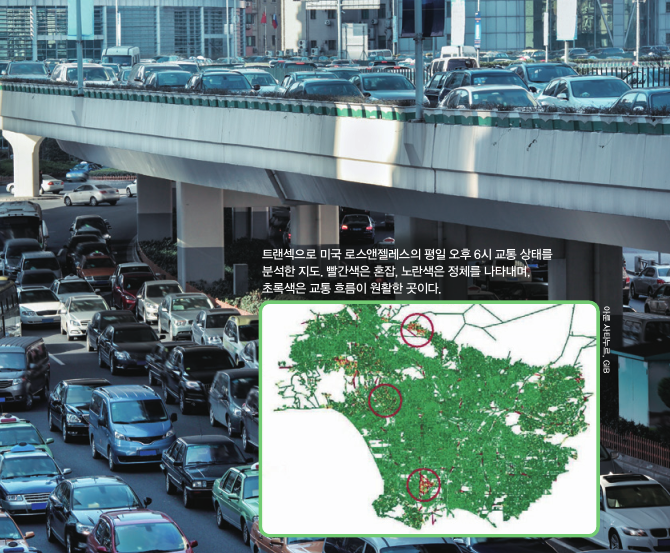
이를 보완하기 위해 아리프 칸 연구원팀은 ‘트랜섹(TranSEC)’이라는 새로운 기계학습 알고리듬을 고안했습니다. 트랜섹을 이용하면 누락된 정보를 채울 수 있어 실시간 도로교통 상황을 보다 정확하게 분석할 수 있습니다. 특히 그래프 이론 기반의 모형을 활용해 이동 시간과 경로를 모두 학습합니다. 그래프 이론이란 점과 선으로 이뤄진 그래프에서 연결관계를 연구하는 수학의 한 분야입니다. 트랜섹은 교통 데이터가 있는 도시지역 어디든 적용할 수 있어 활용도가 높습니다. 또 기계학습을 적용했기 때문에 시간이 지나 데이터가 쌓일수록 정확도가 높아집니다.
연구팀은 이 알고리듬을 활용해 차량 호출 서비스인 ‘우버’ 사용자로부터 실시간으로 수집한 미국 로스앤젤레스의 교통정보와 공공데이터를 바탕으로 도로교통 데이터를 지도로 나타냈습니다. 실시간 교통 정보를 정확하게 알려주는 이 지도를 이용하면 교통 혼잡을 관리하기 위한 의사결정을 빠르게 내릴 수 있습니다.
연구팀은 이 연구 결과를 2020년 8월 24일 미국 샌디에이고에서 열린 ‘SIGKDD 국제도시컴퓨팅워크숍’에서 발표했고, 12월 2일 북서태평양국립연구소 홈페이지에 소개했습니다.