“오오, 꺾는다! 꺾어!”
8월 15일, 탐험대학 교실에 쏘카 매니저인 장혁 멘토와 자율주행차 팀 학생 다섯 명의 목소리가 울려 퍼졌어요. 이들 앞에는 학생들이 만든 자율주행차가 종이 도로 위 커브를 자동으로 달리고 있었지요. 장혁 멘토도 “학생들이 만든 자율주행차가 이렇게 잘 달릴 줄 몰랐다”며 놀랐어요. 비결이 뭘까요?
백문이 불여일견! 자율주행차를 타보다
탐험대학 자율주행차 팀의 첫 수업이 열렸던 건 8월 2일이었어요. 팀을 이끈 장혁 멘토는 “영상 통화로 사전미팅을 했을 때 여러분이 자율주행차를 직접 만들고 싶어 해서 깜짝 놀랐다”며, “다양한 기술이 적용돼 굉장히 어렵겠지만, 마지막 수업에 자율주행차를 만들어 보자”는 말로 포문을 열었어요. 이 말에 학생들은 기뻐 환호했지요.
장혁 멘토는 2015년 ‘폴라리언트’라는 IT기업을 창업해 GPS 위치 정보를 알기 어려운 실내주차장에서 자동차가 자율주행하는 기술을 개발한 뒤, 2019년부터 차량공유기업 ‘쏘카’에서 일하고 있어요. 어릴 적 과학동아에서 사막개미가 편광*을 활용해 방향과 위치를 찾는다는 기사를 보고, 이를 적용해 실내주차장 자율주행 기술을 개발했지요. 장혁 멘토는 “나처럼 과학잡지를 보며 꿈을 키우는 어린 공학자들을 만나고 싶었다”며 탐험대학에 함께한 이유를 밝혔어요.
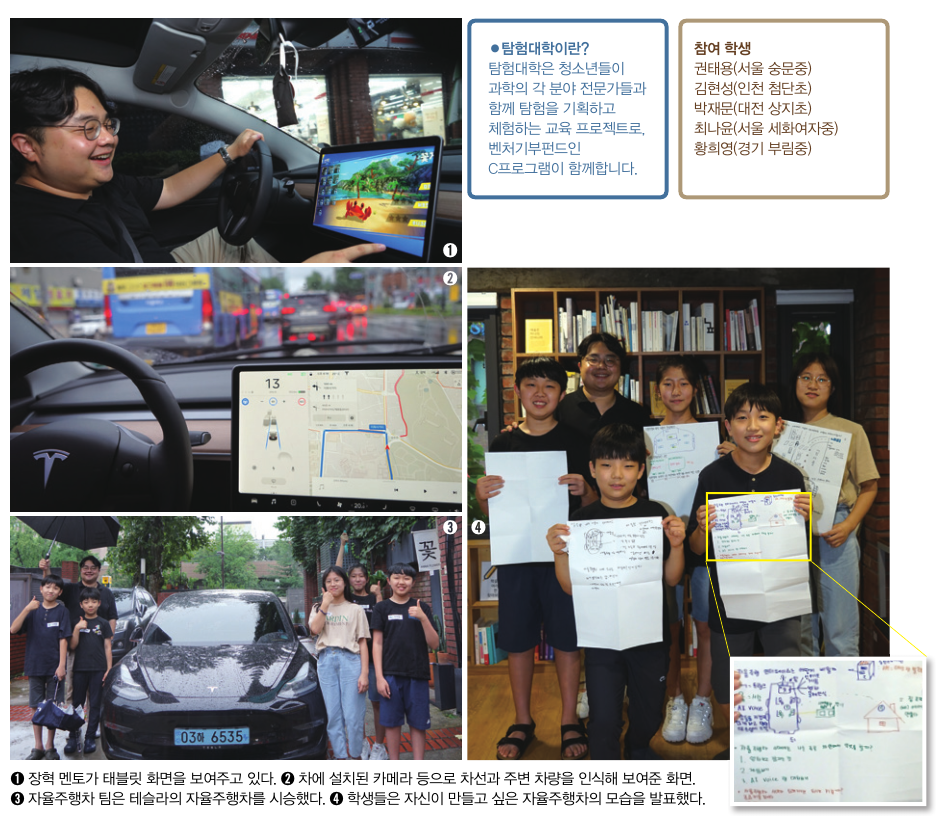
첫 수업의 하이라이트는 장혁 멘토가 준비한 3단계 자율주행차를 직접 타보는 거였어요. ‘3단계 자율주행’이란 일부 도로에서만 자율주행을 하고, 나머지는 운전자가 직접 운전을 하는 단계예요. 그런데 웬걸? 멘토가 시동을 걸어도 차는 ‘부르릉’ 소리를 내거나 진동이 느껴지지 않았어요. 장혁 멘토는 “이 차는 전기로 엔진을 켜는 전기자동차”라며, “엔진을 작동시키기 위해 기름에 불꽃을 튀길 때 나는 시동 소리가 없다”고 설명했어요.
드디어 학생들이 탄 자동차가 큰 도로로 나갔어요. 운전대 옆 태블릿 화면엔 자율주행 기능을 실행할 수 있다는 신호가 떴지요. 자율주행 모드로 전환한 자동차는 자동으로 앞 차와의 간격을 조절하며 주행했어요. 장혁 멘토는 “차선이 분명하거나 앞에 주행하고 있는 차가 있을 경우 자율주행 기능을 사용할 수 있다”고 말했지요. 자동차가 차선을 인식해서 도로를 파악하고, 앞 차와의 간격으로 속도를 조절할 수 있기 때문이랍니다.

공학자와 과학자의 차이는 무엇?
자율주행차를 만들기로 한 8월 22일, 기자는 다시 탐험대학 학생들을 만나 그동안 배운 것 중 어떤 게 가장 도움이 될 것 같은지 물었어요. 김현성 학생은 “공학자가 갖춰야 할 태도”라고 답했어요. 실제로 장혁 멘토는 “공학자의 탐험은 과학자와 달리 관찰하는 데서 그치지 않고 제품 등을 실제로 만들어내야만 한다”며, “장애물을 뚫고 완성해 내는 게 공학자의 태도”라고 강조해왔지요.
한편, 황희영 학생은 “자율주행차가 주변을 인식할 때 사용하는 기술 중 레이더와 라이더의 차이가 기억에 남는다”고 말했어요. 레이더는 전자기파를 쏘아 차량 등에 부딪혀 반사된 뒤 돌아오는 전자기파로 장애물의 존재를 알아내는 기술이에요. 라이더는 레이더와 원리는 비슷하지만 파장*이 짧고 하나의 파장으로만 이뤄진 레이저를 사용해요. 파장이 짧으면 물체의 작은 굴곡도 인식할 수 있어 장애물의 형태까지 자세히 파악할 수 있어요. 하지만 비싼 데다 빗방울도 장애물로 인식한다는 단점이 있지요.
장혁 멘토는 첫 수업에서 전 세계 공학자들이 자율주행차에 라이더를 쓸지, 아니면 레이더와 카메라로 주변 환경을 인식할지를 두고 경쟁하고 있다고 설명했어요. 그러면서 “공학에서 정해진 답은 없으며, 먼저 완성된 기술이 사용되는 것”이라며 공학의 특징을 강조했지요.
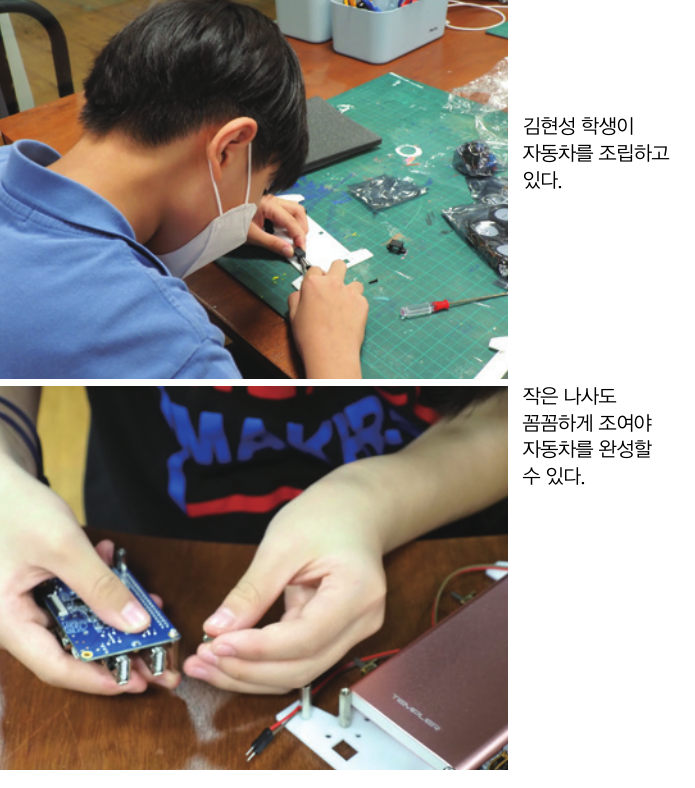
학생들은 카메라만을 이용해 주변 환경을 인식하는 ‘미니 자율주행차’를 만들기로 했어요. 작은 컴퓨터인 ‘오렌지 파이’로 인공지능을 학습시킬 수 있는 교육용 키트를 사용했지요. 학생들은 두 팀으로 나뉘어 작은 나사를 끼우고, 얇은 전선을 끙끙대며 연결해 자동차를 조립했어요. 권태용 학생은 “조그만 전선과 나사를 다룰 때 정말 힘들었다”고 말했어요.

고치고 또 고쳐, 마침내 성공하다!
이제 자율주행차를 학습시킬 차례예요. 학생들은 먼저 자율주행차가 달릴 도로를 만들었어요. 차선이 분명하게 보이도록 하얀 종이에 까만 테이프를 붙였지요.
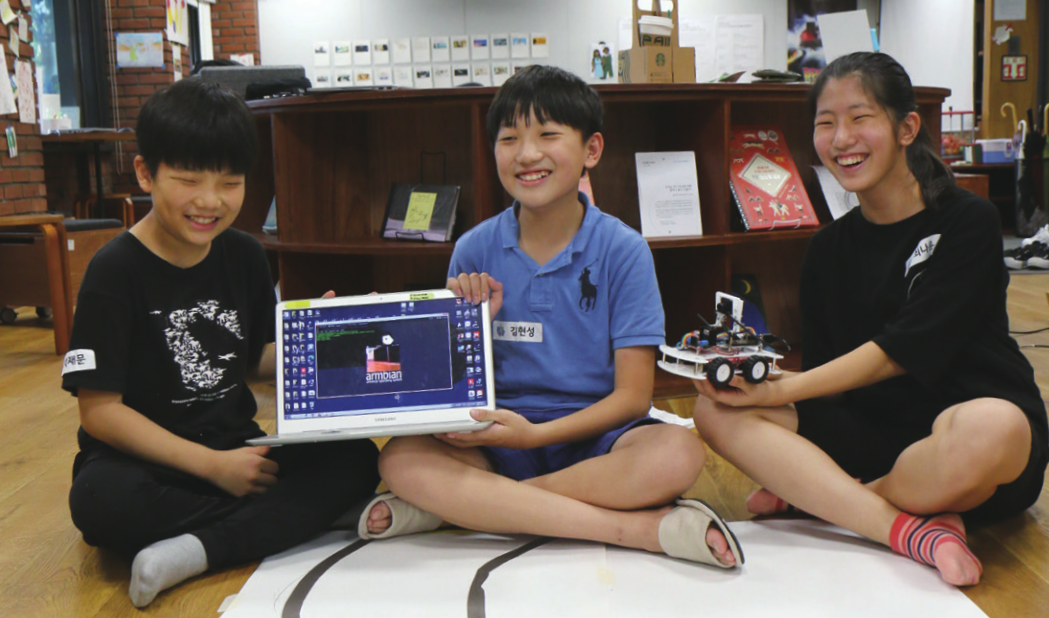
학습 데이터를 쌓기 위해 학생들은 자율주행차의 오렌지 파이에 모니터를 연결하고 인공지능을 학습시킬 수 있는 운영체제를 설치했어요. 노트북에는 자율주행차를 조종할 수 있는 원격 제어 프로그램을 깔았지요. 자율주행차를 수동으로 움직이며 카메라로 도로를 찍어 인공지능을 학습시킬 계획이었어요. 주행 훈련에는 최나윤 학생이 나섰어요. 미리 만들어둔 종이 도로에 자동차를 올리고, 왼쪽과 오른쪽 화살표를 누르며 운전했지요. 그런데 자동차가 자꾸 도로 밖으로 나갔어요.
“아! 도로의 커브가 너무 많이 꺾였나 봐요!”
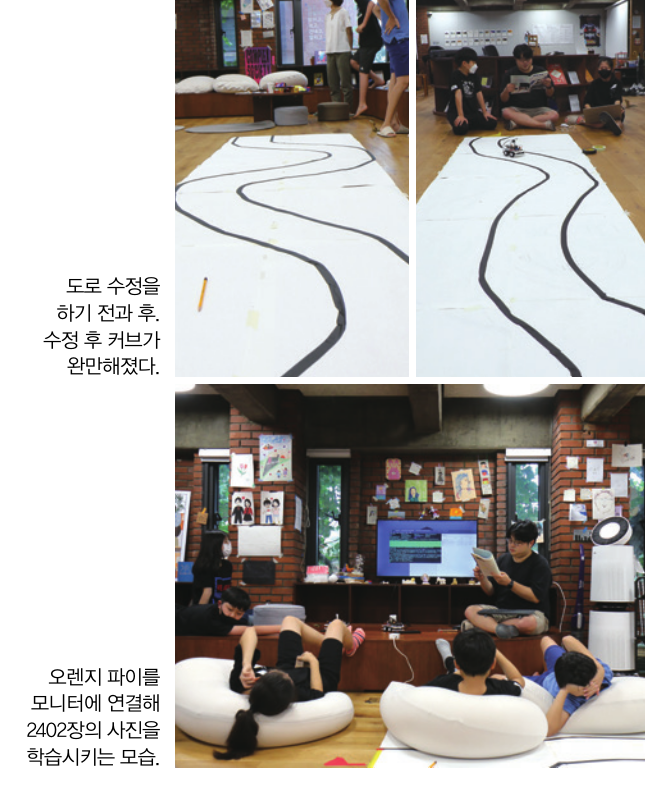
학생들이 소리치며 도로 공사를 시작했어요. 그런데 검정 테이프를 붙이다 보니 차선의 너비가 처음보다 넓어졌어요. 장혁 멘토는 “자율주행차는 두 차선을 동시에 인식해야 하는데, 이렇게 도로가 넓으면 불가능하다”고 문제점을 지적해 주셨죠. 학생들은 멘토의 도움으로 도로를 반복해서 수정했어요. 자율주행차를 위한 도로는 어때야 하는지 몸소 깨닫는 시간이었지요.
도로를 고치자 자율주행차를 수동으로 운전하는 게 훨씬 쉬워졌어요. 수동 주행을 십여 번 마치고 자동차의 오렌지 파이를 모니터에 다시 연결하자, 총 2402장의 사진이 찍혀있었어요. 장혁 멘토와 학생들은 이 데이터로 오렌지 파이의 인공지능을 학습시켰어요. 그리고 도로 주행을 다시 시작하자 자동차는 조종하는 사람이 없는데도 도로를 벗어나지 않고 주행을 완료했지요. 박재문 학생은 “실제로 자율주행을 성공시켜 뿌듯하다”고 소감을 말했답니다.
용어정리
*편광 : 빛이 진동하는 방향이 일정하게 고정되거나 규칙적으로 바뀌는 것.
*파장 : 파동이 한 번 진동하는 동안 이동한 거리. 빛은 파장이 짧을수록 에너지가 크다.