
로봇이 거울 앞에서 다양한 움직임을 수행하면 알고리즘은 전면 카메라로 녹화된 이미지를 분석한다. 로봇은 이 과정을 반복해 나가며 스스로 동작을 만들어 나간다.
거울에 비친 모습을 통해 스스로 동작을 교정하는 로봇이 등장했다. 미국 콜롬비아대 창의적기계연구소 소속 호드 립슨 교수팀은 카메라를 통해 자신의 움직임을 관찰하며 신체 구조와 운동을 익힌 뒤 어떤 행동을 취할지 스스로 정하는 로봇을 공개했다.
대부분의 로봇은 기존 설계대로만 행동한다. 이에 로봇 공학자들에겐 로봇의 물리적 특성과 움직임, 주변 환경 등 여러 변수를 사전에 계산해야 하는 어려움이 따른다. 또한 로봇은 시뮬레이션으로 무수히 반복 학습을 거친 후에야 특정 동작을 수행한다. 이후에도 로봇의 잘못된 행동을 수정하기 위한 재프로그래밍 과정이 필수다.
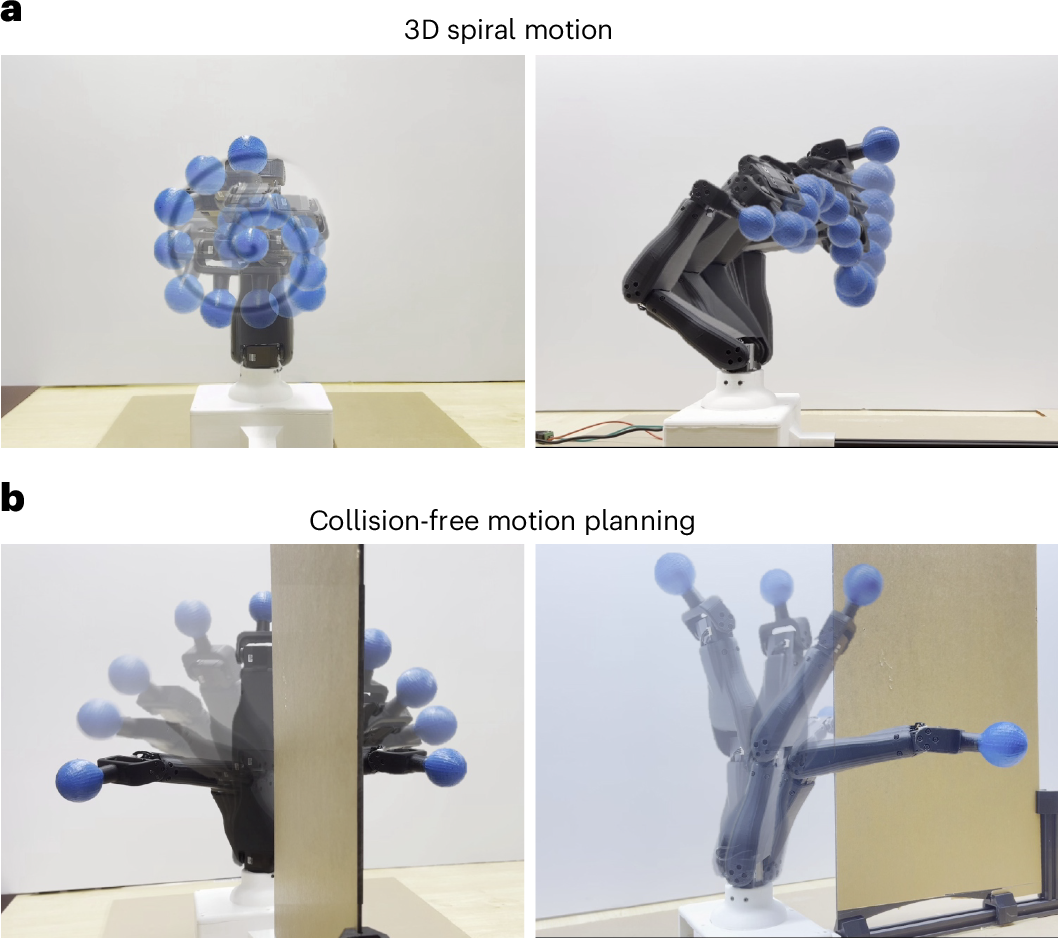
이런 한계를 극복하기 위해 연구팀은 ʻ자기 지도 학습’을 통해 혼자서 학습하는 로봇을 고안했다. 연구팀이 개발한 로봇은 전면에 설치된 카메라 한 대의 영상으로 자신의 동작, 운동 등을 알아서 조정한다. 마치 사람이 거울을 보면서 자신의 자세를 가다듬는 모습과 유사하다.
연구팀은 이런 자기 지도 학습을 적용하기 위해 ʻFFKSM(Free-Form Kinematic Self-Model)’ 이라는 알고리즘을 개발해 로봇에 탑재했다. 로봇이 거울 앞에서 다양한 움직임을 수행하면 알고리즘은 전면 카메라로 녹화된 이미지를 분석한다. 알고리즘은 분석한 데이터를 바탕으로 입체적인 움직임을 예측하는데, 로봇은 이 과정을 반복해 나가며 스스로 동작을 만들어 나간다.
또한 로봇은 자기 몸의 손상을 감지하고 복구까지 해냈다. 연구팀이 로봇 팔을 일부러 구부리자 로봇은 구부리기 전의 움직임과 비교하며 손상을 성공적으로 감지했다. 이후 추가적인 학습을 통해 손상된 상태에서도 최적의 움직임을 찾아 냈다. 로봇이 최적의 움직임을 다시 찾아내기까지 불과 몇 초밖에 걸리지 않았다.
향후 이 기술은 제조업, 의료, 가정용 로봇 등 다양한 분야에서 활용될 수 있을 것으로 기대된다. 공장에서 로봇 팔이 오작동하더라도 스스로 복구해 작업을 지속하거나 가정용 로봇이 실내 가구 변화에 맞춰 자동으로 적응할 수 있는 식이다. 연구팀은 휴머노이드처럼 더 복잡한 형태의 로봇에도 이 기술을 적용하기 위해 연구를 이어 갈 계획이다. 이번 연구는 국제 학술지 ʻ네이처 머신 인텔리전스’에 2월 25일 게재됐다. doi: 10.1038/s42256-025-01006-w











