2022년 기준 전 세계에서 가장 바쁜 공항은 미국 애틀랜타 국제공항이라고 합니다. 2022년 한 해에만 약 72만 건의 항공기 이착륙을 처리했다고 하는데요. 이것은 하루 동안 이착륙이 약 1800번 이뤄진다는 뜻입니다. 수많은 비행기가 공항 주변을 둘러싼 가운데, 비행기들은 어떻게 충돌하지 않고 차례대로 활주로에 안전하게 착륙할 수 있을까요? 비행기는 높고 빠르게 움직이는 까닭에 각 비행기의 조종사가 육안으로 상황을 파악하기란 불가능합니다. 따라서 이 모든 상황을 파악하고 각 비행기 간의 이동을 조율해주는 존재가 필요하죠. 바로 관제탑입니다.
비행기 n대로 늘면 충돌위협 제곱(n2)으로 증가
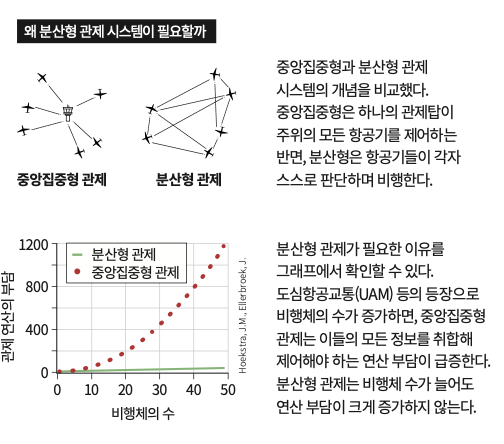
관제탑은 관제소 근처 모든 항공기의 정보를 모아 운항을 관리합니다. 모든 항공기를 관제하려면 그 정보를 전부 알아야하므로, 관제소 업무의 복잡도는 항공기 수의 제곱으로 커지죠.
예를 들어 항공기 두 대가 있을 때, 항공기 간 충돌위험이 발생할 수 있는 경우의 수는 1, 즉 두 항공기의 충돌입니다. 세 대라면 어떨까요? 경우의 수는 1-2번, 2-3번, 1-3번 항공기의 충돌, 총 3으로 늘어납니다. 네 대라면 경우의 수는 6, 다섯 대면 10이 되죠. 이를 일반식으로 표현하면 n대의 항공기가 있을 때 가지의 충돌위협을 계속 감시해야한다는 뜻이 됩니다.
즉 관제탑이 신경쓸 업무는 비행기 대수에 정비례하지 않고, 제곱항(n2)에 비례합니다. 단순화된 계산이므로 이 공식이 관제탑의 정확한 업무량을 대변하진 않습니다. 그럼에도 항공기 대수가 늘면 관제탑의 처리 용량이 금세 한계에 부딪힌다는 점만큼은 분명히 보여줍니다.
그런데 이젠 항공기뿐만 아니라 다른 유형의 비행체도 우리의 일상으로 새로 들어오고 있습니다. 바로 에어택시와 같은 도심항공교통(UAM)인데요. 이들은 항공 교통의 밀도를 더욱 크게 높일 것으로 예상됩니다. 관제탑의 업무 부담도 폭증할 것입니다. 이 문제를 어떻게 해결할까요? 기존의 관제 패러다임이 어째서 이런 한계에 부딪혔는지, 보다 본질적인 질문을 던질 필요가 있다는 것이 이번 논문 주제의 출발점입니다.
중앙집중형 시스템 vs. 분산형 시스템
현재의 관제탑처럼 모든 정보를 취합해 하위 존재들을 제어하는 방식을 중앙집중형 시스템(Centralized system)이라고 합니다. 중앙집중형의 장점은 필요한 모든 정보를 파악해 전체 시스템의 관점에서 최적의 결정을 내릴 수 있다는 것이죠. 하지만 앞서 언급한 사례처럼 관리 대상이 많아지면 부담이 급증합니다. 더욱이 정보가 집중된 중앙시스템의 안정이 전체 시스템의 안정과 직결되므로, 제어의 부담이 큰 상태에서 높은 신뢰도까지 달성해야합니다. 매우 까다로운 조건이죠. 관제탑 사례에서 본 문제는, 중앙집중형 시스템의 고유한 특징이기도 합니다.
그렇다면 반대로 비(非)-집중형 시스템, 즉 분산형 시스템(Decentralized system)을 생각해볼까요? 분산형은 전체를 관장하는 중앙의 존재를 걷어내고, 시스템을 이루는 각각의 하위 개체들이 자신의 행동을 직접 판단하는 방식입니다. 관제탑은 사라지고 각 비행기가 알아서 비행하죠. 분산형의 장점은 시스템이 커져도 각 개체들이 자신의 상황을 해결하는 덕분에, 전체 시스템의 연산 부담도 분산된다는 것입니다. 만약 연산 오류가 발생해도 그 오류는 해당 비행기에 한정되므로, 개별적 오류가 전체 시스템 붕괴로 이어지지 않는다는 특징도 중요합니다.
여기서는 ‘어떻게’ ‘각자의 판단’만으로 전체 시스템의 안정을 추구하느냐가 관건입니다. 각 비행기가 인지 가능한 정보엔 한계가 있습니다. 전체 시스템의 상황을 모르고 개별 비행기가 판단하면, 모두의 안정을 달성하긴커녕 파괴할 가능성마저 있습니다.
마주한 두 비행기가 회피하는 상황을 예로 들겠습니다. 서로 반대로 선회하면 충돌을 피하겠죠. 하지만 불운히도 같은 쪽으로 선회해버리면 충돌할 수 있습니다. 복도에서 마주친 사람들이 서로 비켜주려다 오히려 부딪힐 뻔한 상황과 같습니다. 이런 문제를 해결하면서 각자의 판단에 의존하는 관제가 가능할까요?
희망은 있습니다. 분산형 시스템은 사실 주변에서 아주 쉽게 볼 수 있어요. 길을 걷거나 운전을 하는, 우리의 모습입니다.
각자의 판단이 모이는 지점, 내쉬균형
우리가 번잡한 쇼핑몰을 돌아다니거나 꽉 막힌 출퇴근길에서 운전할 때 서로 접촉 내지 충돌하는 경우는 의외로 드뭅니다. 이때 걸어다니고 운전하는 모든 행위는 중앙의 지시를 받지 않습니다. 우리 각자가 판단, 결정하죠. 즉 보행과 주행 모두 이미 분산형 시스템의 일종입니다. 우리는 분산적으로 판단, 행동하며 전체적 관점에서도 꽤 효율적인 사회적 선(善)을 이뤘죠.
어떻게 우리는 분산적으로 안정한 이 시스템을 만들었을까요? 각 개체의 판단, 선택이 전체 시스템에도 이로우려면 개체들 간의 합의점이 필요합니다. 합의점은 ‘서로 만족스러운’ 지점입니다. 분산형 시스템에선 각 개체가 자신에게 이로운 쪽으로 행동을 바꿉니다. 합의점이 ‘서로 만족스럽다’는 것은, 바로 각 개체가 자신의 행동을 바꿔도 더 나은 이득이 없는, 최선의 행동임을 뜻합니다.
게임이론(Game theory)은 개별 개체들 간의 상호작용을 연구하는 분야입니다. 이 게임이론에서 말하는 내쉬균형(Nash equilibrium)은 위에서 말한 각자에게 최선인 행동의 집합, 즉 합의점을 뜻합니다. 내쉬균형에선 개별 개체가 자신의 선택을 유지하므로, 이 균형은 개체들이 이룬 사회적 상태를 상징하죠.
내쉬균형은 각 개체의 행동규범이 모여 어떤 사회적 상태가 될지 예상하는 데 매우 유용합니다. 게임이론이 이 균형의 수학적 조건을 잘 정리한 이유죠. 각자의 행동(xi개체 i의 행동)과 그에 따른 각자의 이득을 설명하는 함수를 효용함수(Ui(xi , x-i))로, 각 개체별 효용함수의 최대점들이 모이는 지점을 내쉬균형으로 정의합니다.
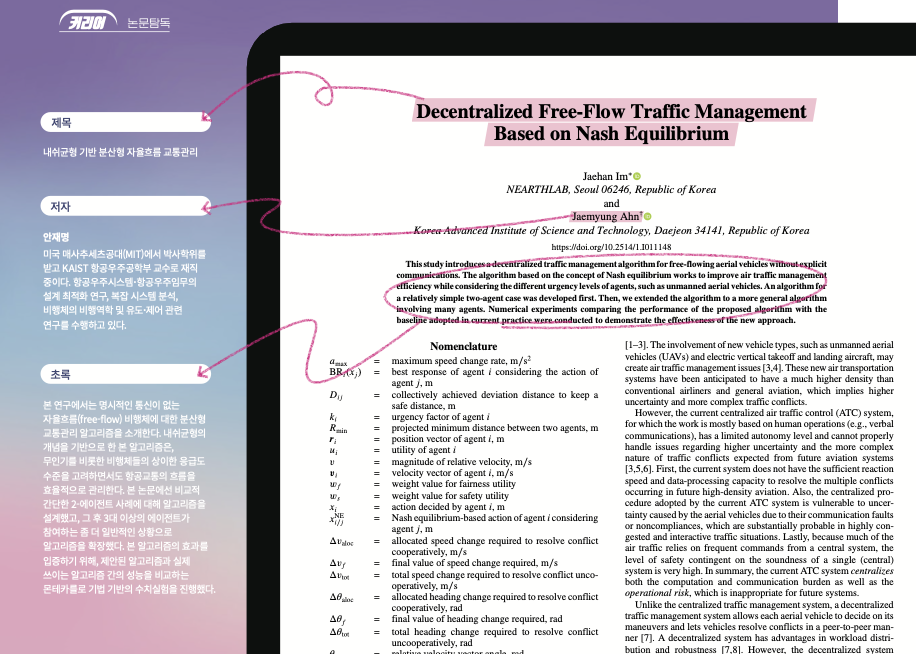
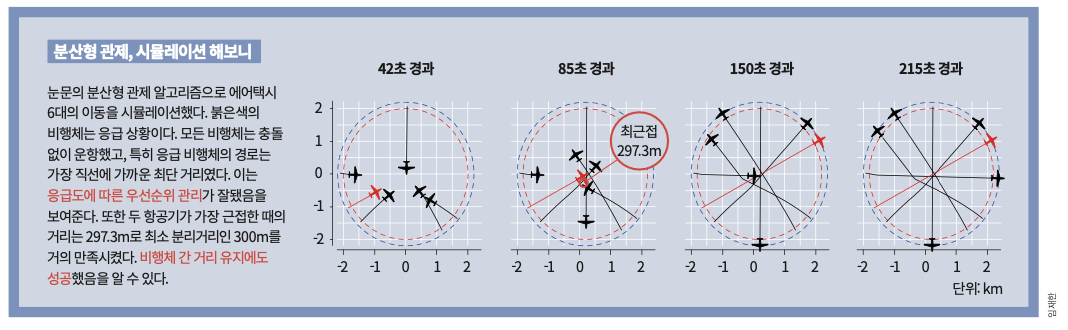
내쉬균형을 계산할 수 있으면 원하는 사회적 현상을 이루기 위한 개별 행동규칙을 설계하는 역방향의 접근도 가능합니다. 이번 연구는 비상 항공기에 길을 터주는 ‘응급도 관리’, 관제탑의 핵심인 ‘충돌 방지’ 기능의 분산형 관제시스템을 제안합니다.
이 연구는 내쉬균형에서 응급도 관리, 충돌 방지가 이뤄지는 효용함수부터 제안합니다. 여기에 간단한 동역학 모델을 통합해, 움직이는 교통수단에 내쉬균형을 실질적으로 적용할 수 있는 수식을 유도하죠. 내쉬균형이 각 개체에 적용되면, 이것들이 주변 개체들의 위치 정보와 응급도 정보를 전달받고 유도된 수식에 따라 행동함으로써 분산형 관제시스템이 구현됩니다.
다함께 해결하는 복잡한 미래
이번에 소개한 논문은 수많은 임의의 시나리오로 시뮬레이션을 실행해 그 성능을 통계적으로 검증했습니다. 각 개체들 간의 명시적 의사소통 없이도, 해결이 힘든 항공교통 상황에서 충돌 회피와 응급도 관리를 성공적으로 할 수 있음을 보였죠. 또한 이 분산형 관제가 항공기는 물론 열차, 드론, 자율주행차량에도 적용 가능하며, 이때 보행자의 행동 양식까지 모사함을 확인했습니다.
물론 분산형 관제시스템도 여러 과제가 있습니다. 실제 항공교통 상황에 맞는 현실적인 효용함수를 설계해도, 이 효용함수에 적절한 내쉬균형이 있는지 보장할 수 없다는 점이 그중 하나입니다. 효용함수의 특성에 따라 내쉬균형이 아예 없거나, 복수의 내쉬균형이 있습니다. 단일한 내쉬균형이 존재하더라도 현실에 적용하려면 보다 엄밀한 수학적 성능 검증이 필요합니다.
그럼에도 이번 연구는 분산형 관제라는 새 패러다임의 가능성을 분명히 시사합니다. 어쩌면 미래의 하늘길은 항공기들이 서로 적당히 눈치를 보며 요리조리 나는 모습이 될 수도 있습니다. 마치 사람들이 복작거리는 길거리를 능숙하게 걷듯이 말이죠.