한 시간 만에 걷는 법을 배운 로봇이 나왔다. 펠릭스 루퍼트 독일 막스 플랑크 연구소 다이내믹 로코모션 그룹 연구원팀이 7월 18일 발표한 로봇 개 ‘모티’의 얘기다. doi: 10.1038/s42256-022-00505-4 개발 과정과 의의를 모티와의 가상인터뷰 형식으로 재구성했다.
Q.등에 있는 건 뭐예요?
가상 척수예요. 이건 사람의 척수와 같은 역할을 해요. 아기들은 처음 걸음마를 배울 때 척수반사에 의존해 뒤뚱뒤뚱 한 걸음씩 떼거든요. 넘어지려고 할 때 감각뉴런이 상황을 감지하고 척수로 신호를 보내면 척수에서 빠르게 운동뉴런을 조절하는 무조건 반사가 일어나요.
그러다 중추패턴발생기(CPG)가 발달하면서 자연스럽게 걸을 수 있어요. CPG는 척수에 있는 신경망이에요. 이 신경망은 뇌에서 움직이란 명령을 하지 않아도 사람이 걸음이나 수영처럼 패턴이 있는 움직임을 취할 수 있도록 하죠. 저도 아기처럼 가상 척수에 척수 반사와 CPG 발달 과정을 모델화했어요. 그리고 한 시간만에 스스로 걷는 법을 터득했죠.
Q.어떻게 한 시간 만에 걸었어요?
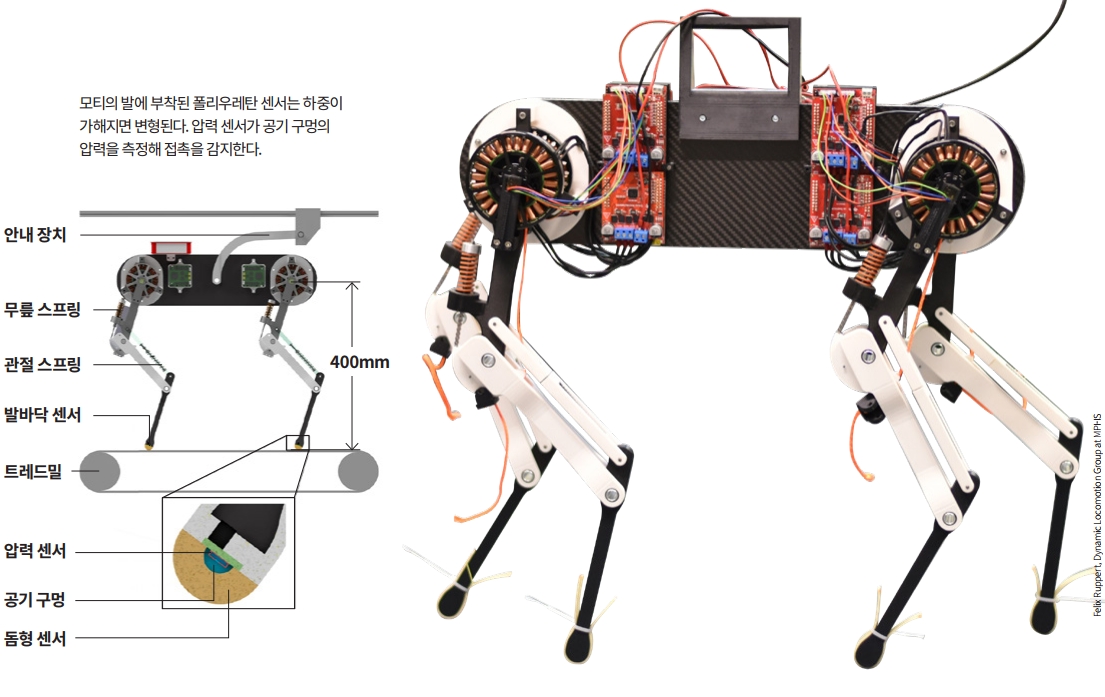
제 발에는 센서가 있어요. 제가 걸음을 옮길 때마다 감지된 데이터가 실시간으로 CPG에 입력돼요. CPG는 계속해서 제가 발을 내디딜 지점을 예상하고 입력받은 실제 지점을 비교하면서, 걸음 알고리즘을 최적화해요. 제가 1시간 만에 걷는 법을 배웠다는 말은 CPG가 1시간 만에 최적화됐다는 뜻이기도 해요.
Q.CPG 최적화, 어떻게 한 건가요?
똑바로 걸었을 때의 데이터만 활용했어요. 예를 들어 제가 균형을 잃었을 때는 내디딘 발의 센서에서 평소와 다른 데이터가 감지돼요. 이게 기존 패턴과 다르다는 점을 파악하고, CPG가 수정되지 않게 해요. 즉 휘청이며 걸었을 때 얻은 데이터는 학습하지 않는 거죠.
Q.모티는 어떤 의미가 있어요?
저는 로봇공학과 생물학의 교차점에 있어요. 절 만들어 준 알렉산더 바드리-스프뢰비츠 그룹 리더는 “살아있는 동물의 척수를 연구하는 것은 어렵지만 로봇에 척수를 모델링 할 수 있다는 것을 보여줬다”면서 “로봇 모델이 생물학만으로는 구하기 어려운 질문에 대한 대답을 내놓을 수 있다”고 평가했답니다.