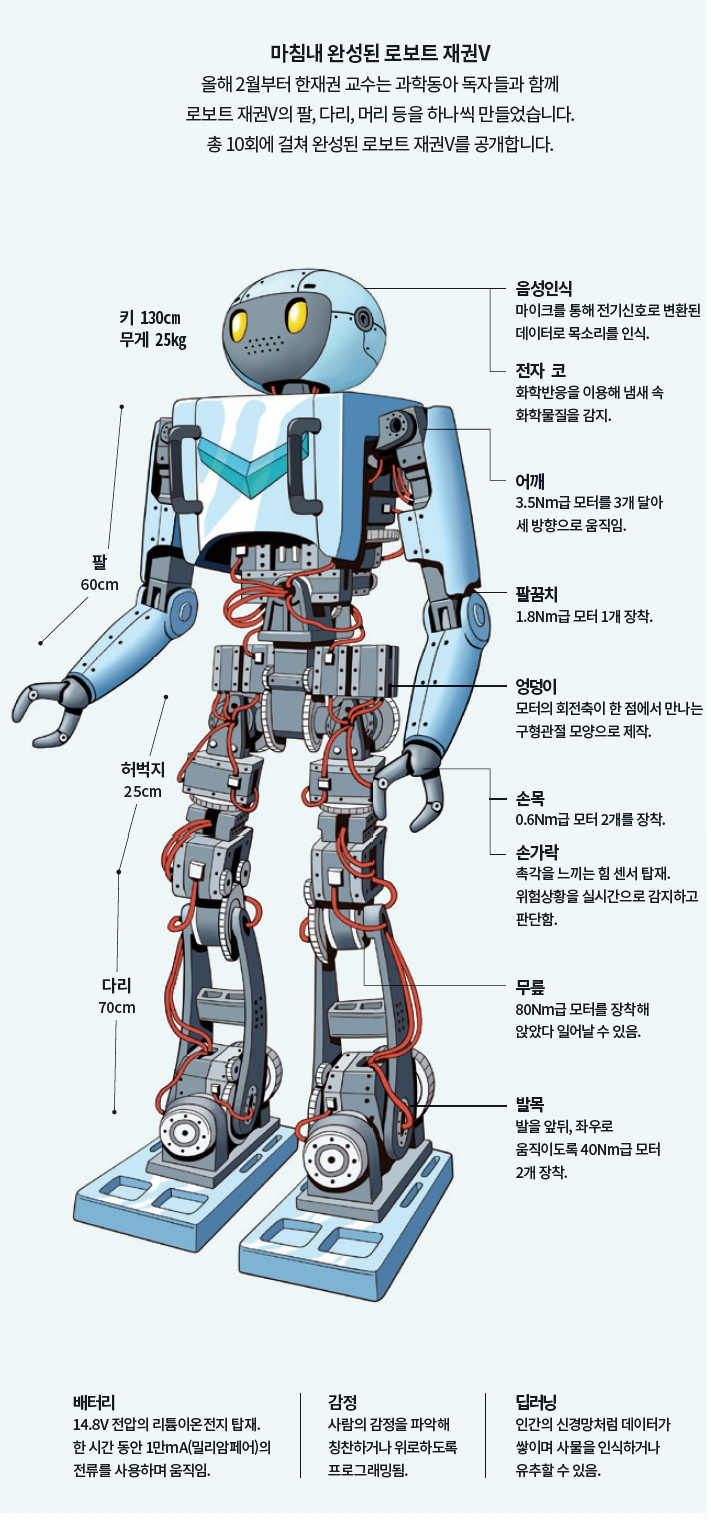
우리는 지금까지 로보트 재권V의 몸체를 만들기 위해 로봇의 팔, 다리, 몸통, 머리에 대해 알아봤습니다. 또 전원을 공급하고 인공지능을 넣어서 로봇을 움직일 수 있게 만들었지요. 로보트 재권V가 일을 잘 할 수 있도록 각종 센서를 장착했고, 인간과 상호 교류하기 위한 감정 표현도 시도했으며, 힘을 느끼게 하기도 했습니다. 이제 로보트 재권V가 출동할 준비가 다 된 것 같습니다.
그런데 막상 출동하려고 하니 불안한 것이 하나 있네요. 바로 균형 잡기입니다. 로보트 재권V가 우리 주변에서 일하다가 누군가와 부딪쳐서 넘어지기라도 하면 사람이든 로봇이든 많이 다치지 않을까 하는 불안감이 듭니다. 이번 호에서는 마지막으로 로보트 재권V에게 균형감각을 주고 감정을 더해 완성해보겠습니다.
균형을 잡는 네 가지 방법
항상 그렇듯이 사람을 먼저 관찰해 보겠습니다. 사람은 어떻게 균형을 잡을까요? 우리 귀에는 반고리관이라는 기관이 있어서 몸의 움직임을 감지하고 있습니다. 특히 몸이 회전할 때 민감하게 작동합니다. 그래서 넘어지는 것과 같은 급격한 움직임에도 몸이 기울어지고 있다는 사실을 빠르게 알아차릴 수 있습니다.
일단 넘어진다는 신호가 감지되면 대뇌가 아닌 척수에서 넘어지지 않게 하는 동작 명령을 빠르게 반사적으로 만들어 냅니다. 이를 흔히 반사신경이라고 하는데요. 로봇 용어로는 ‘보정’이라는 말을 쓰겠습니다.
로봇이 넘어지지 않기 위한 보정 명령은 넘어지는 종류에 따라 크게 네 가지가 있습니다. 제일 약한 보정은 넘어지는 반대 방향으로 발목이나 무릎 골반 등 다리 관절을 움직여서 몸의 중심을 유지하는 것입니다. 울퉁불퉁한 길을 걸어가는 경우 우리는 발목과 무릎에 힘을 줘 과하게 움직이거나 엉덩이를 앞뒤로 움직이는 방식으로 균형을 유지합니다.
좀 더 큰 보정이 필요한 경우에는 허리까지 이용합니다. 허리를 갑자기 숙이거나 뒤로 젖히는 동작으로 몸의 중심을 잡습니다. 길을 걷다가 무언가와 부딪히거나 누가 뒤에서 툭 하고 미는 경우 우리 몸은 이렇게 반응합니다. 몸의 중심을 유지하기 위해서는 반발력을 만들어 내는 것이 중요한데, 허리 관절은 우리 몸에서 가장 큰 반발력을 만들어 내거든요.
허리의 움직임으로도 보정이 안 되는 큰 힘이 가해졌을 때는 팔까지 이용합니다. 팔을 허공에서 마구 돌리면 몸의 중심을 유지할 수 있는 반발력을 만들어 낼 수 있습니다.
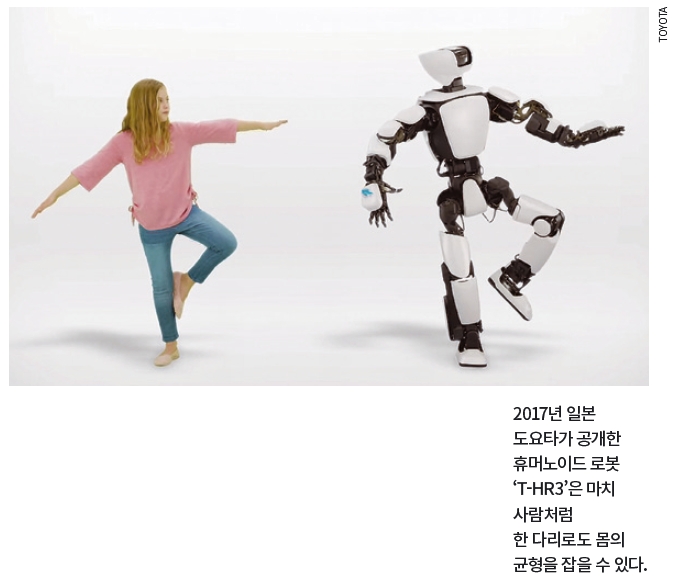
그런데 누군가 뒤에서 너무 세게 밀 때는 아무리 팔을 휘저어도 중심을 유지하기 어려운 상황이 벌어질 수 있습니다. 이때는 최후의 방법으로 걷거나 뛰어야 합니다. 넘어지는 방향으로 빠르게 걸어가서 넘어지는 위치보다 발이 앞서면 넘어지지 않을 수 있습니다. 인간은 이렇게 네 가지 방법을 상황에 따라 적절하게 사용하면서 균형을 유지하며 살아갑니다.

반고리관 모방한 ‘IMU 센서’
로보트 재권V에게도 같은 전략을 적용하면 좋을 것 같습니다. 일단 우리 몸의 반고리관 역할을 할 수 있는 움직임 감지 센서를 장착합시다. 흔히 회전하는 물체의 기울기를 측정하는 자이로 센서를 사용하면 로봇이 움직임을 감지하게 할 수 있습니다.
요즘 자이로 센서는 물체의 가속도와 지자기까지 측정할 수 있는 ‘IMU(Inertial Measurement Unit) 센서’로 진화해 널리 사용되고 있습니다. IMU 센서는 스마트폰에도 장착돼 있는데요. 스마트폰의 기울어지는 정도를 감지한 뒤 화면을 자동으로 돌려주거나, 가속도를 측정해서 우리가 몇 걸음을 이동했는지 측정해주기도 합니다. 사실 좋은 IMU 센서는 탄도 미사일이나 드론의 핵심 부품이라서 수출이 규제되는 핵심 품목이기도 합니다.
IMU 센서가 장착된 로보트 재권V는 이제 균형을 잃는 등 이상 신호를 감지해 낼 수 있게 됐습니다. 로보트 재권V가 넘어지지 않기 위해서는 측정된 이상 신호의 양에 따라서 사람이 하듯 위의 네 가지 보정 명령을 만들어 내야 합니다.
약한 이상 신호에서는 발목과 무릎을 좀 더 움직여서 무게중심을 유지합니다. 다리 관절로는 보정할 수 없는 수준의 큰 이상 신호가 측정되면 허리를 굽히거나 젖혀야 합니다. 그것으로도 부족하다면 팔을 휘젓고 뒤로 움직이면서 균형을 잃지 않도록 만들어야 합니다. 이런 보정 기능이 들어간 로보트 재권V라면 이제 어디든 출동해도 마음이 놓일 것 같습니다.
마지막으로 마음을 넣어 완성하다
그렇게 우리의 마음은 놓였는데, 과연 로보트 재권V의 마음은 어떨까요? 쉽게 상상이 되지 않습니다. 로봇에게 마음이라는 것이 존재하는지도 궁금합니다. ‘오즈의 마법사’에서 양철 나무꾼은 따뜻한 마음을 얻는 것이 소원이었죠. 로보트 재권V는 어떤 마음을 가지고 우리와 같이 살아가고 싶을까요? 그 전에, 마음이 있기는 할까요? 만약 마음이 없다면 마음을 가지고 싶어 할까요?
우리 인간에게 마음이란 무엇인지부터 생각해봅시다. 인간이라면 마음은 당연히 갖고 있는 것이라 굳이 더 알 필요가 없는 것일까요. 사실 많은 사람들이 마음이 무엇인지 정의를 내리기는커녕 자신의 마음조차 잘 모른다고 생각합니다.
공학자인 필자의 입장에서 마음에 대한 정의를 내리자면, 마음은 인식하고 기억하는 대뇌의 작용이 몸에서 생성되는 각종 호르몬의 화학반응과 함께 일어나는 작용입니다. 참으로 낭만적이지 못한 생각이죠.
만약 마음이 이런 공학적인 작용일 뿐이라면, 낭만적이지는 않아도 로보트 재권V에게 마음을 심어주는 것은 가능해 보입니다. 로보트 재권V에 설치된 각종 센서를 통해 세상을 인식하게 하고, 인식된 데이터를 메모리에 저장한 뒤 프로세서를 통해 연산 과정을 거쳐 무언가를 결정하게 합니다. 그리고 몸에 장착된 액추에이터를 움직여, 이 결정에 대해 적절히 행동합니다.
로보트 재권V가 이렇게 작동할 수 있다면 마음을 가진 것처럼 보일까요? 누군가는 로보트 재권V가 마음을 가졌다고 생각할 테고, 누군가는 그럼에도 불구하고 로보트 재권V의 마음이 인간의 마음과는 다르다고 느낄 겁니다.
결국 마음이라는 것은 그것을 보는 상대방에 의해 존재하는 것이 아닐까 생각합니다. 어떠한 존재가 마음이 있다고 믿으면 그제야 마음이 생기는 것이죠. 김춘수 시인의 ‘꽃’의 시구가 좋은 대답이 될 것 같습니다.
내가 그의 이름을 불러주기 전에는
그는 다만
하나의 몸짓에 지나지 않았다.
내가 그의 이름을 불러주었을 때,
그는 나에게로 와서
꽃이 되었다.
올 한해 과학동아 지면을 통해서 로보트 재권V를 만들어봤습니다만, 로봇을 만든 창조자로서 로봇을 지배하려는 것이 아니라는 점을 꼭 얘기하고 싶습니다. 인간과 세상을 함께 살아가는 존재로서 로봇을 존중하고 아끼며, 로봇과 인간은 서로에게 도움을 주는 존재가 돼야 한다고 생각합니다.
인간은 서로 아껴주는 친구 같은 존재와 함께 살아갈 때 어려움을 이겨나갈 힘을 얻고 큰 위안을 받습니다. 우리가 로보트 재권V를 만든 이유가 인간의 행복한 삶을 만들기 위한 것이라는 핵심을 잊지 않는다면, 로보트 재권V와 함께 하는 삶은 분명 지금보다 더욱 나은 삶이 될 것이라 믿습니다. 지난 1년간 로보트 재권V의 제작을 함께 해 주신 독자 여러분에게 진심으로 감사드립니다.