기다란 막대기를 손바닥 위에 올려놓고 쓰러뜨리지 않고 오랫동안 세우는 놀이를 해본 적 있으신가요? 2~3초 동안 세우기도 쉽지 않습니다.
다리 하나로 균형을 유지한다는 것은 막대기 세우기 놀이와 비슷합니다. 다리 두 개로 이동한다는 것은 기술적으로 정말 대단한 도전입니다. 움직이기 위해 다리 하나를 위로 들어올리는 순간 나머지 다리 하나가 몸 전체의 균형을 유지해야 하니까요.
그런데도 우리 인간은 건강에 어려움만 없다면 매일 두 다리로 걸어 다니고 있습니다. 아주 당연하다는 듯이 말이죠. 매일 하고 있다 보니 별로 어렵지 않다고 생각하는 것 같기도 합니다. 하지만 발목을 삐끗하는 등 조금이라도 다리에 문제가 생겼을 때는 두 다리로 걷는 일이 얼마나 어렵고 동시에 대단한 일인지 새삼 깨닫게 됩니다.
그렇다면 왜 이 어렵고도 대단한, 두 다리로 걷는 일을 로봇에게 시키는 걸까요? 강아지나 고양이처럼 네 다리로 다니면 더 쉬울 텐데 말입니다. 로봇공학자인 필자가 다리 두 개로 걷는 이족 보행 로봇을 좋아하고, 또 이를 위해 도전을 멈추지 않는 이유는 명확합니다. 로봇이 인간 사회에서 더욱 잘 적응하고 유용하게 쓰였으면 하는 바람 때문입니다.
만약 로봇을 산이나 들 같은 험한 환경에서 사용해야 한다면 필자도 다리 네 개 달린 로봇을 선택할지도 모르겠습니다. 그러나 로봇이 도시 환경에서 활동해야 한다면, 더구나 우리가 살고 있는 집안이나 사무실에서 써야 한다면, 다리 두 개 달린 휴머노이드(Humanoid) 로봇이 더 유용합니다.
잠시 글 읽기를 멈추고 눈을 들어서 주변 사물들을 한번 보세요. 얼마나 많은 사물이 우리 인간이 사용하기에 편리하도록 만들어졌는지요! 의자, 책상, 책장, 싱크대, 찬장, 문, 손잡이, 계단…. 이들의 구조를 잘 들여다보면, 의자 등받이 각도부터 책상 높이, 손잡이의 휘어진 정도까지 각각의 모양과 디자인에 다 이유가 있습니다.
그래서 이 모든 것을 잘 사용하는 로봇을 만들려면 마찬가지로 로봇이 인간을 닮을 수밖에 없습니다. 다리 네 개보다 다리 두 개인 로봇이 의자에도 앉을 수 있고, 키가 커서 높은 곳에 놓인 물건도 집을 수 있습니다. 얇은 몸은 좁은 공간도 지나갈 수 있지요. 결국 로봇이 우리 사회에서 더 많은 일을 해내기 위해서는 이족 보행이라는 어려운 일을 할 수 있어야 합니다. 그럼 이제 차근차근 로보트 재권V의 다리를 설계해 보겠습니다.
로봇 다리는 무릎부터 설계
3월호에서 로보트 재권V의 팔을 ‘자유도 6’으로 설계했습니다. 자유도 6을 선택한 이유는 3차원 공간에서 모든 곳에 닿을 수 있는 최소 숫자가 6이기 때문이었지요(자유도에 대한 자세한 설명은 과학동아 2019년 3월호 ‘로봇 팔을 달까, 말까?’ 참조).
이와 마찬가지로 다리도 자유도 6, 즉 6개의 관절로 설계하겠습니다. 물론 더 많은 자유도의 다리를 만든다면 더 자연스러운 걸음걸이를 구현할 수 있습니다. 하지만 이렇게 되면 모터의 개수가 많아져 다리가 무거워지고 제어도 복잡해지는 만큼 일단 최소 숫자인 6으로 결정해봅시다.
사실 로봇 중에는 자유도 5로 만들어지는 작은 로봇들도 있습니다. 이 로봇들은 걸음걸이가 상당히 제한돼 아주 부자연스럽게 걸을 수밖에 없습니다. 가령 30cm급 상업용 로봇이 그렇습니다. 그런데 로보트 재권V는 키가 1m가 훨씬 넘는 큰 로봇이기 때문에 아무리 양보해도 최소한 자유도 6은 돼야 합니다.
자유도를 결정했으니 이제 본격적으로 다리를 설계해 봅시다. 다리 관절 중에서 가장 먼저 설계해야 할 관절은 어디일까요. 엉덩이? 무릎? 발목?
필자의 경우 무릎을 가장 먼저 생각합니다. 로봇의 다리 자유도가 6밖에 되지 않아 움직일 때 무릎에 힘이 가장 많이 들어가기 때문입니다. 그리고 이 부분이 로봇과 사람의 관절 사이에 가장 큰 차이점이기도 합니다.
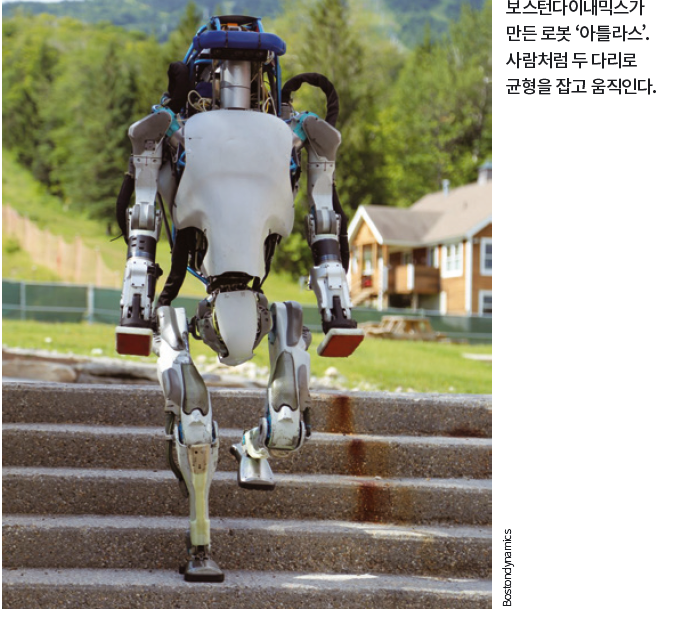
혹시 휴머노이드 로봇들이 무릎을 구부리고 구부정하게 걷는 동영상을 본 적 있으신가요? 일본의 ‘아시모(Asimo)’ 한국의 ‘휴보(Hubo)’ 같은 유명한 휴머노이드 로봇들도 사람과는 다르게 무릎을 구부린 채 힘들게 걷습니다. 이 모든 것이 사람의 다리처럼 자유도가 많지 않은 상태에서 2족 보행을 하기 때문입니다. 그래서 무릎에 많은 힘이 집중됩니다. 이 때문에 가장 먼저 무릎 관절에 쓸 모터를 신중하게 선정해야 합니다.
무릎 모터를 선정할 때 일차적인 기준은 앉았다 일어나는 동작을 소화할 수 있어야 한다는 겁니다. 무릎을 움직일 때 이 동작보다 더 큰 힘이 필요한 동작이 거의 없기 때문입니다. 그래서 많은 로봇공학자들이 로봇을 만든 뒤 처음 동작 시험을 할 때 앉았다 일어나는 동작을 반복하게 합니다.
로보트 재권V는 초등학교 3학년 정도인 키 130cm 로봇인 만큼 다리 길이는 그 절반보다 약간 긴 70cm 정도면 되겠네요. 그리고 허벅지의 길이는 다리의 절반보다 작은 25cm 정도면 적당할 것 같습니다. 그리고 몸무게는 25kg보다 가벼운 것을 목표로 만들고 있으니, 무릎의 토크는 25kgX0.25m=6.25kg·m가 필요합니다. 표준 토크 단위(Nm)로 환산하면 대략 61.3Nm의 토크입니다.
토크에서 약간의 여유분까지 고려해야 하므로, 로보트 재권V의 무릎 모터는 80Nm급의 출력을 낼 수 있는 것으로 선정하겠습니다. 상당히 힘 센 모터를 구매해야 하겠네요. 이렇게 큰 힘을 낼 수 있는 좋은 모터를 구매하다 보니 로봇 만들 때 재료비가 많이 들 수밖에 없습니다.
발목에는 무릎 절반 힘 가해져

이제 다리와 몸통을 잇는 엉덩이 부분을 설계해봅시다. 엉덩이는 많은 동작을 자유롭게 소화할 수 있어야 합니다. 그래서 자유도 3으로 설계하겠습니다. 3개의 모터가 한 점을 중심으로 움직이는 효과를 내기 위해 모터의 회전축이 한점에서 만나게 만드는 구형관절(spherical joint) 모양으로 만들겠습니다.
엉덩이는 다리를 좌우로 비트는 동작을 구현하는 관절을 제외하고는 무릎 수준의 토크가 가해지기 때문에, 다리를 앞뒤로 흔드는 방향의 모터와 다리를 옆으로 벌리는 방향의 모터는 각각 80Nm급으로 선정하겠습니다. 다리를 좌우로 비트는 방향의 모터는 이 토크의 절반 정도면 충분한 만큼 40Nm급으로 정하면 적당할 것 같습니다.
이제 발목 모터를 정해 볼까요. 사실 발목은 걷는 동작에서는 그렇게 큰 힘이 들어가지 않습니다. 그런데 앉았다가 일어나는 동작에서는 무릎의 절반에 해당하는 힘이 들어갑니다. 이를 고려하면 발목 모터는 40Nm급으로 선정하면 좋겠습니다.
만약 로보트 재권V가 태권도 옆차기 같은 동작을 구현해야 한다면 발목에 힘이 많이 들어갈 텐데요. 로보트 재권V는 ‘로보트 태권V’가 아니고 친한 친구 같은 로봇이라서 그렇게 과격한 동작을 필요로 하진 않을 것 같습니다. 그러니 로보트 재권V의 발목에는 발을 앞뒤로 움직이는 방향과 발목을 좌우로 움직이는 방향 총 2개의 모터를 40Nm급으로 선정하도록 하겠습니다.
이제 팔과 다리에 들어갈 모터 선정이 끝났네요. 이로써 신체적인 골격은 어느 정도 갖춘 것 같습니다. 이제는 로보트 재권V를 똑똑하게 만들 때가 됐습니다. 다음 호에서는 요즘 각광 받고 있는 로봇의 인공지능(AI)에 대해 알아보고, 로보트 재권V가 움직일 수 있도록 프로그램을 만들어 보겠습니다. To be Continued. 
한재권
한양대 로봇공학과 교수다. 휴머노이드 로봇 개발을 비롯해서 인간과 로봇간의 상호작용 연구를 활발하게 수행하고 있다.
jkhan@hanyang.ac.kr