“몇몇 로봇은 제한된 상황이라면 당장이라도 재난 현장에 투입할 수 있어 보입니다.”
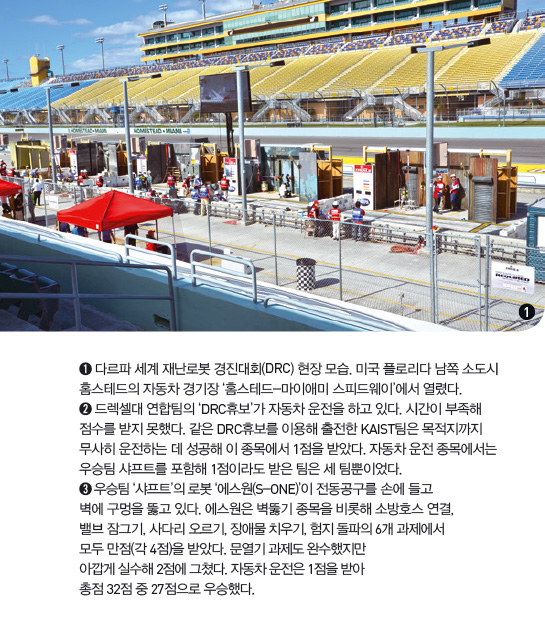
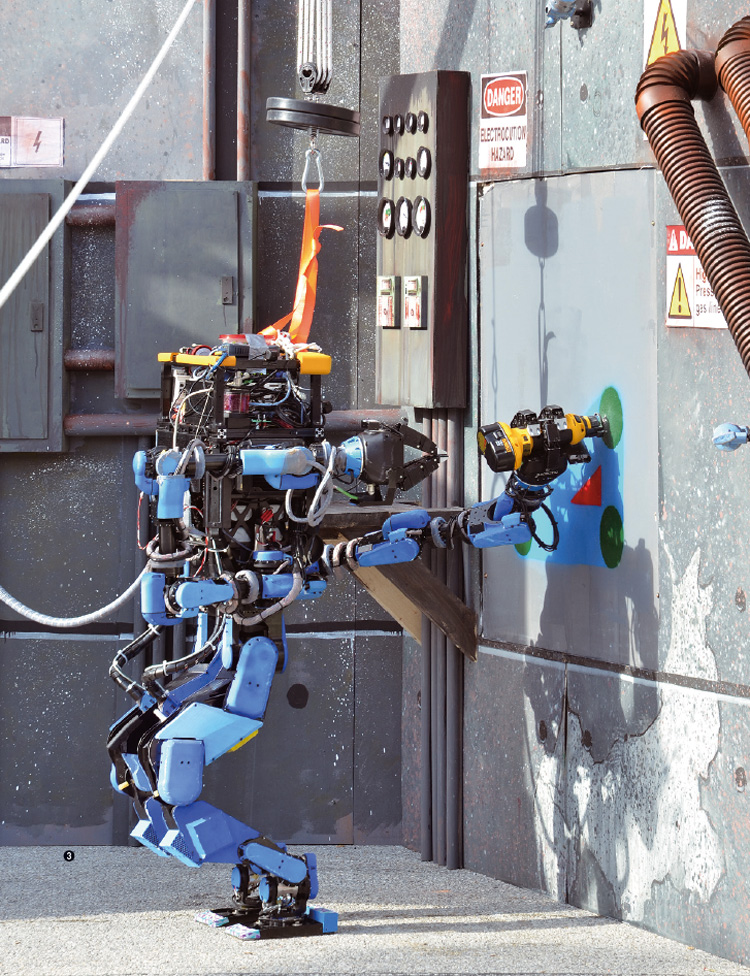
다르파 세계 재난로봇 경진대회(DRC)에 참가한 KAIST팀의 한 연구원이 일본 팀 샤프트가 내놓은 로봇 ‘에스원’이 험지를 내달리듯 주파하는 모습을 보며 말했다. 1등에 오른 샤프트는 그 정도로 압도적이었다. 사실 이번 대회는 처음부터 황당했다. 이런 과제를 정말 로봇이 할 수 있을까 싶었다. 하지만 현장에서 살펴본 재난로봇의 수준은 몇 년 전에 비해 부쩍 높아져 있었다.

로봇이 사다리 오르기도 척척
예를 들어 자동차 종목은 처음부터 난제 중의 난제로 꼽혔다. 첨단 센서와 카메라를 주렁주렁 매단 무인자동차도 사람 없이 혼자서 도로로 나가려면 부담스러운 게 현재의 기술 수준이다. 이런 무인 운전을 차에 탄 로봇이 해결해야 한다. 로봇이 사람 대신 운전을 마치면 1점, 차에서 걸어 내리면 1점, 주차구역을 걸어서 빠져나가면 1점을 받는다. 모든 것을 성공적으로 마치면 보너스 1점을 받는다. 대회 전 로봇의 자동차 운전은 불가능하다고 생각했지만 일본 샤프트와 KAIST, 토르 등 3개 팀은 그래도 1점을 받았다.
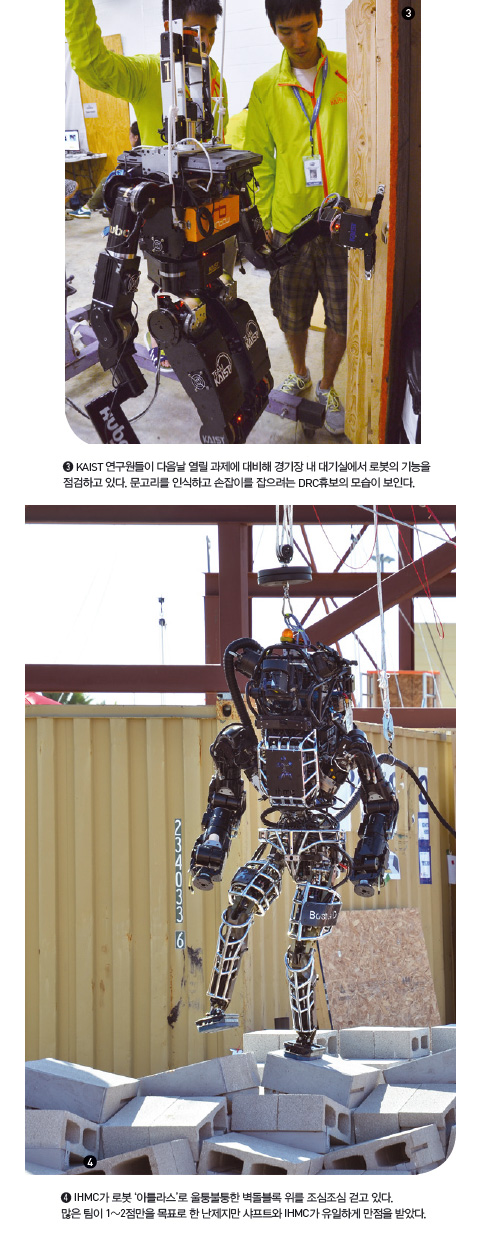
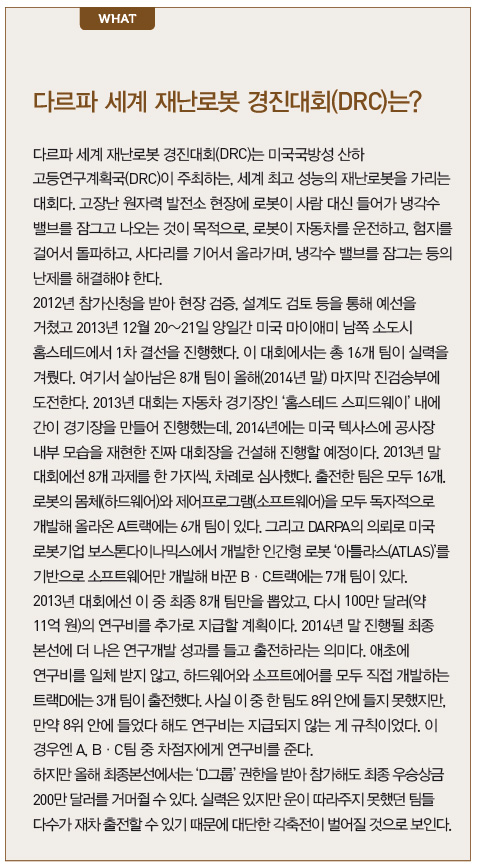
주행과 사다리 오르기도 쉽지 않은 과제로 통했다. 하지만 울퉁불퉁한 콘크리트 블록 무더기 위를 걷는 험지 주행에서 샤프트와 IHMC 팀이 만점을 받았다. 사다리 오르기도 샤프트와 KAIST, 두 팀이 만점을 받았다. 샤프트의 로봇 에스원은 큰 사다리를 계단처럼 성큼성큼 걸어 올라갔다. KAIST 팀은 로봇의 긴팔을 뒤로 돌려 사다리 양쪽 손잡이를 붙잡고 뒷걸음질을 치며 올라가, 사다리를 기어서 올라간 최초의 로봇으로 기록됐다. 쉬운 과제라고 생각했던 벽 뚫기, 밸브잠그기 등에서 0점을 받는 팀이 속출했다.
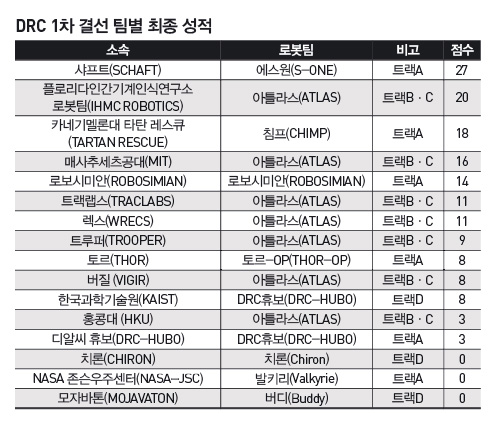
이번 대회에는 7종의 로봇이 경연을 벌였다. 한국인의 관심을 끌었던 건 역시 우리나라 로봇 휴보와 똘망이었다. KAIST 팀은 로봇 휴보를 개조한 ‘DRC휴보’를 들고 나갔다. 시합 전에는 ‘우승 후보’라는 말을 들었는데 첫날 문 열기, 장애물 제거, 벽 뚫기 등 3개 종목에서 0점을 받고, 소방호스 연결과 밸브 잠그기 등 나머지 2개 종목에서도 각각 1점을 받는 데 그쳐 아쉬움을 남겼다. 발목센서 고장이 원인이었다. KAIST팀은 밤새 고장난 부품을 교체했지만 다음날 남은 종목은 3개뿐이었다. DRC휴보는 두 번째 날사다리 오르기에서 4점 만점, 험지 돌파와 자동차 운전에서 각각 1점을 땄다. 공식 순위는 11위였다.
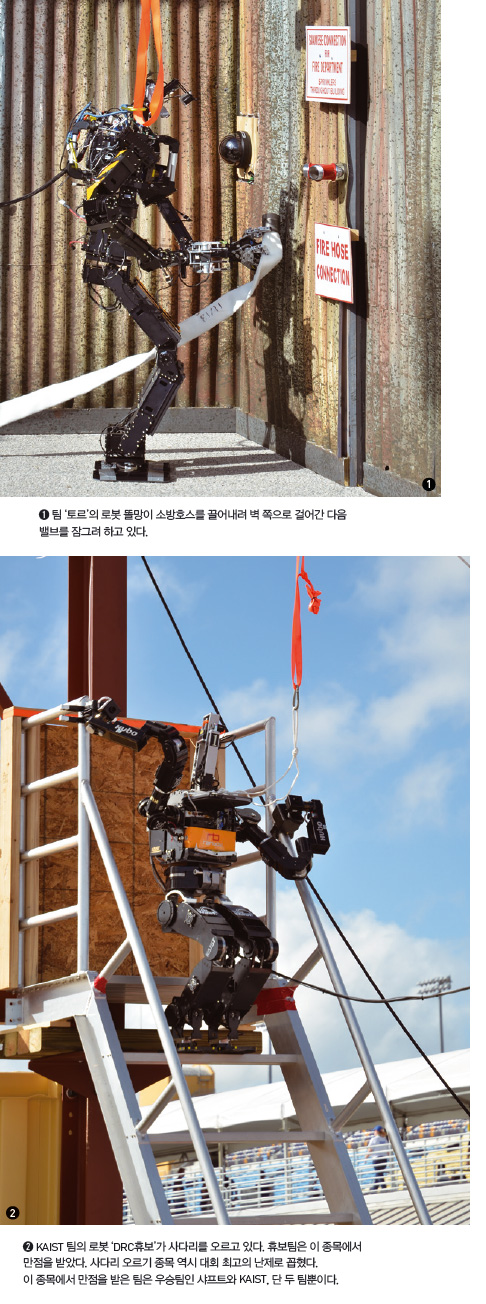
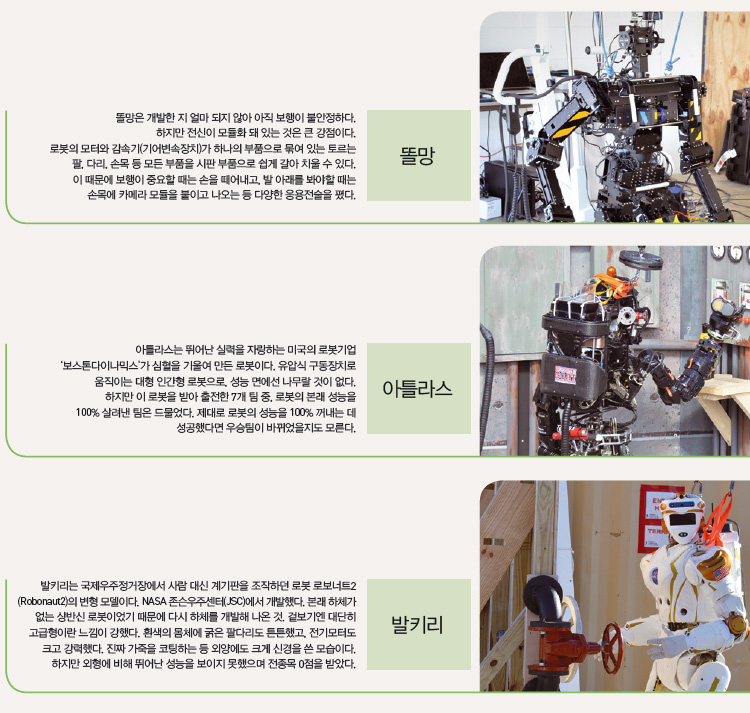
한국계 미국인 데니스 홍 교수가 이끄는 팀 ‘토르’도 한국인이 주축인 팀이다. 본래 미국 해군 연구과제로 개발하던 선박용 소방수로봇 ‘사파이어(SAFFiR)’를 대회용으로 다시 개발해 참여하려 했다. 그러나 제어기능이 완성되지 않아 상반신만 같은 ‘토르 OP(오픈플랫폼)’, 일명 똘망을 갖고 참가했다. 똘망은 한국기업 로보티즈가 개발했다. 똘망은 문 열기, 소방호스 연결, 밸브 잠그기 등에서 부분점수를 받아 총점 8점으로 KAIST 팀과 동점을 받았다. 다만 중간에 사람이 개입한 횟수가 KAIST보다 적어 공식 순위는 9위를 기록했다. 내년에 토르 원형을 갖고 나온다면 부족한 걷기 성능이 보완되면서 한층 높은 점수를 받을 수 있을 것이다.
현장에서 만난 데니스 홍 교수는 “아쉽게 9위를 했다. 추가 연구비를 받지 못하더라도 내년 최종 결선에는 꼭 도전할 생각”이라고 말했다. 오준호 KAIST 기계공학과 교수는 “어려운 점이 많았지만 이번 대회를 통해 불가능할 것처럼 보이던 재난 로봇의 가능성을 발견했다”며 “최선을 다해 내년 최종 결선을 준비할 생각”이라고 말했다.