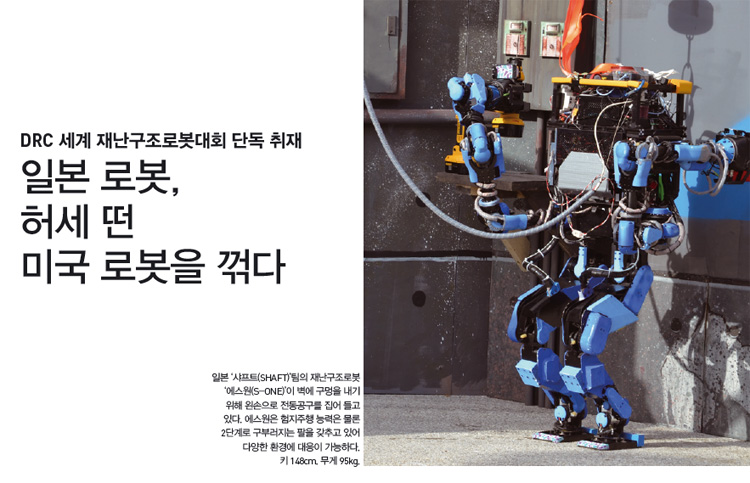
기술력의 일본로봇이 허세로 가득한 미국로봇을 꺾었다. 12월 20~21일(현지시간) 이틀동안 미국 플로리다 주, 마이애미-데이드(Miami dade) 카운티 홈스테드(Homestead) 시에 자리한 자동차 경기장 ‘마이애미 스피드웨이’에서 열린 세계 재난구조로봇 경진대회 ‘다르파 로보틱스 챌린지(DRC)’에서 로봇 에스원(S-One)을 내세운 일본팀 ‘샤프트(SHAFT)’가 최종 우승자로 확실시 된다.
반면 세계 최고의 기술력을 호언장담했던 미국 로봇 중 일부가 최악의 성적을 내며 탈락해 실망을 안겼다. 이번 행사에 참여한 나라는 모두 세 곳. 한국과 일본, 미국이다. 실제로 인간형로봇을 개발할 수 있는 나라도 세계에서 이들뿐이다. 이번 행사엔 중국이 참가신청을 했지만 대회 현장에도 나타나지 않아 빈축을 샀다.
우승로봇 에스원, 혼다 ‘아시모’와 사촌
로봇 에스원은 예행연습에서 다른 팀들이 거의 시도조차 포기한, 콘크리트 블록을 산처럼 쌓은 험지를 내달리듯 돌파해 혀를 내두르게 했다. 20일 대회에선 장애물 치우기, 밸브 잠그기 등 다양한 과제도 과제당 최고 점수인 4점을 척척 따 냈다. 21일 최종 결전을 남겨 두고 있지만 20일 첫째 날 과제만으로도 전체 24점 만점(보너스 점수 8점 포함) 중 18점을 획득해 사실상 우승을 확정지었다. 보행알고리듬 전문가로 KAIST팀 멤버로 합류한 김정엽 서울산업대 교수(전 휴머노이드로봇 연구센터 연구원)는 “일본 로봇이 걷는 모습을 살펴보면 사람이 개발한 거라는 생각이 들지 않는다”며 “기본인 걸음걸이가 안정돼 있으니 모든 미션을 손쉽게 해치우는 것 같다”고 말했다.
로봇 에스원은 세계최고 인간형 로봇으로 꼽히는 일본 혼다자동차의 ‘아시모’와 같은 혈통이다. 에스원을 개발한 샤프트는 최근 구글에 팔려 호평받고 있는 기업으로, 관련 기술은 일본 산업기술연구소(AIST)에서 이전받았다. AIST 연구팀은 오래전부터 인간형로봇 HRP시리즈를 개발하며 기술력을 쌓은 곳으로 유명하다. 그리고 아시모를 개발한 혼다는 AIST와 기술협력을 한 바 있다. AIST는 다시 이 로봇을 거의 그대로 ‘HRP-1’이라는 이름으로 발표했다. 그 후 두 연구팀은 제각각 인간형 로봇을 개발해 왔다.
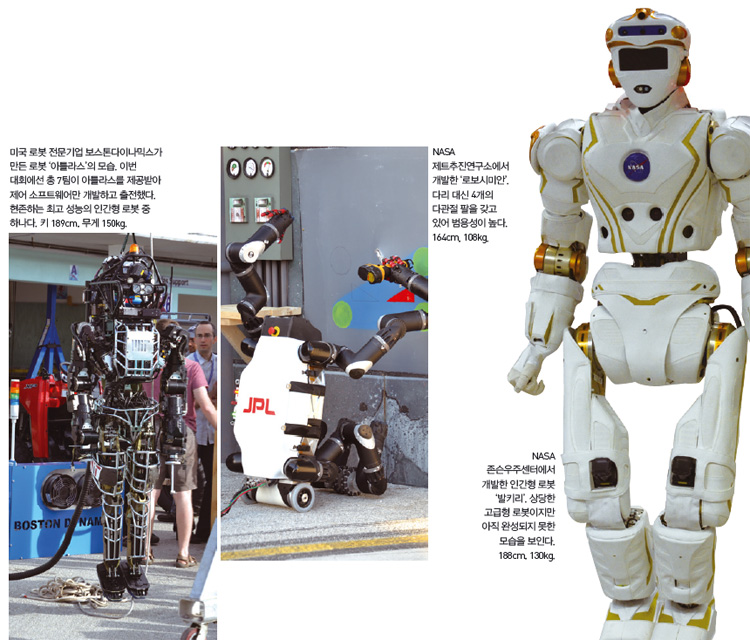
유튜브 동영상을 통해 경악할 만한 운동성능을 자주 보여주며, 일본 아시모에 견줄 만한 세계 최고 수준의 인간형로봇이라 는 평가를 받던 로봇 ‘아틀라스’도 이번 대회에 출전했다. 미국 기업 ‘보스톤다이나믹스’에서 개발한 로봇인데, 같은 몸체를 두고 로봇을 제어하는 소프트웨어만 참가 팀에게 맡겨 경쟁하는 방식이다(트랙 B·C). 하지만 결과는 실망스러웠다. 수십 대 일의 경쟁률을 뚫고 선정된 7개 팀이었지만 짧은 개발기간 때문인지, 아틀라스가 가진 강력한 힘과 특징을 10분의 1도 살리지 못한 경우가 많았다. 대부분의 팀은 주저주저 움직이다가 최저 점수를 받는 경우가 많았다. 다만 가장 기술력이 뛰어난 팀으로 인정받던 미국 MIT 팀은 첫째 날 12점을 얻어 2위에 오르는 등 선전했다. 이 밖에 팀 트랙랩(TRACLabs), IHMC로보틱스팀 등이 상위권의 성적을 보여 체면을 유지했다.
미국항공우주국(NASA) 팀이 자존심을 걸고 개발한 인간형로봇 ‘발키리(북유럽 신화에 나오는 신의 이름)’도 부진했다. 발키리는 NASA 산하 존슨우주센터(JSC)에서 개발한 로봇으로, 국제우주정거장에서 이미 사람 대신 계기판 조작을 담당하던 상반신 로봇 ‘로보너츠’에 하반신을 만들어 붙인 것이다.
NASA 존슨우주센터는 행사 시작 며칠 전에 화성탐사용 로봇으로 활용할 수 있다며 대대적으로 발키리를 공개하기도 했다.
의외였던 점은 발키리는 겉으로 보기에도 대단한 고급형 로봇이란 느낌이 강했다. 흰색의 몸체에 굶은 팔다리도 튼튼했고, 전기모터도 크고 강력한 것을 썼다. 로봇 외부에는 진짜 가죽을 코팅하는 등 외양에도 크게 신경을 쓴 모습이다. 하지만 이렇게 많은 연구비를 투자해 개발한 발키리는 막상 대회에선 수준 이하의 성능을 보였다. 19일 최종연습 때부터 실망을 안겨 주던 발키리는 서너 발자국을 채 걷지 못하고 대부분의 과목에서 0점을 받는 치욕을 당했다.
다만 같은 NASA의 제트추진연구소(JPL)에서 출전한 팀 ‘로보시미안(Robosimian)’은 같은 이름의 개구리형 로봇 ‘로보시미안’을 이용해 중간 정도 성적을 유지했다.
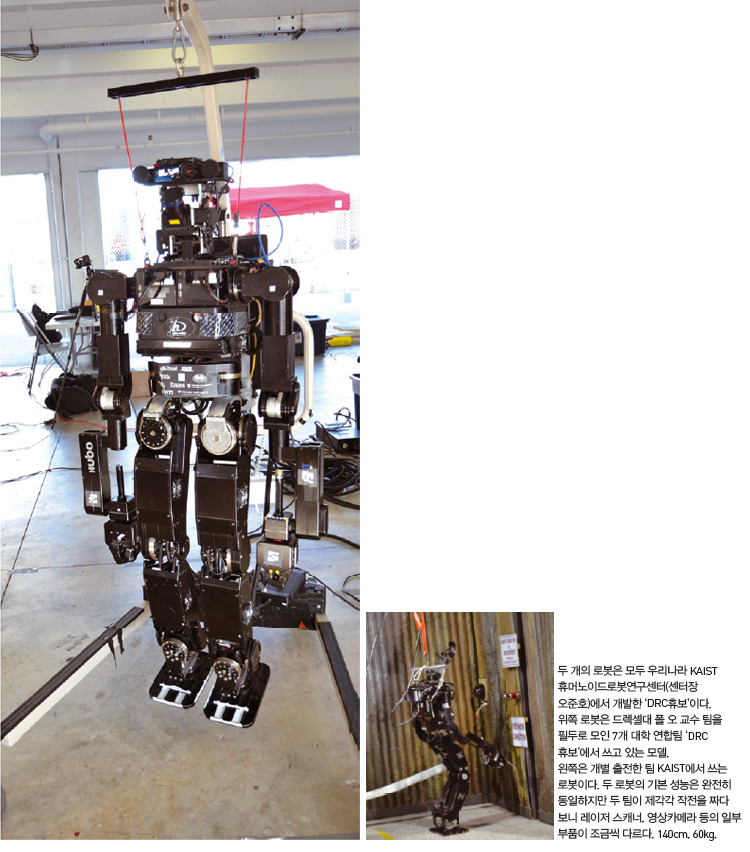
한국팀도 고군분투하고 있다. 이 대회에서 한국인 기술진이 참여한 팀은 세 팀이다. 첫 번째 팀은 ‘DRC휴보’. 미국 드렉셀대가 필두다. 미국 대학이지만 팀 리더는 한국계 미국인인 폴 오 교수가 맡고 있다. 특히 이 팀이 쓰는 로봇은 우리나라 KAIST 휴머노이드로봇 연구센터에서 개발한 재난 구조용 로봇 DRC휴보(DRCHubo)를 이용한다.
KAIST도 같은 DRC휴보를 가지고 독자적으로 참가했다. 일체의 연구비를 받지 않는 그룹(트랙 D)으로 경합 현장에 뛰어든 것이다. 트랙D 참가팀은 연구비 지원이 없는 대신, 2013년 참가는 경험을 쌓는다는 측면이 강하다. 등수와 관계없이 2014년 말에 열리는 최종 결승전에 참가할 수 있다. 두 팀은 첫째 날 성적이 총점 2점 정도로, 계속되는 센서고장 등 불운이 겹쳐 다소 부진한 모습을 보였다. 하지만 둘째 날에는 사다리 오르기, 벽에 구멍내기 등 연습 때 높은 성적을 올린 종목이 배정된 만큼 이를 만회할 수 있을 걸로 보고 있다.
한국계 미국인인 데니스 홍 버지니아텍 교수(2014년 UCLA로 이직 예정)가 이끄는 팀 ‘토르(THOR)’도 8개 팀에게만 주어지는 2014년도 최종 예선 진출이 유력해 보인다. 토르 팀은 두 대의 로봇을 동시에 개발해 왔다. 한 대는 인공근육형 고성능 하체를 가진 로봇 토르, 또 한대는 한국 로봇기업 ‘로보티즈’와 공동 개발한 로봇 ‘토르op(한국명 똘망)’다. 데니스 홍 교수는 토르 개발을 기한 안에 끝내지 못해 좀더 빨리 완성됐던 토르op를 들고 대회에 참가했다. 데니스 교수는 “올해는 예선통과가 목표고 내년에는 토르를 완벽히 개발해 우승을 노릴 생각”이라고 말했다.
로봇공학 한계 실험했던 자리
현장에서 살펴 본 DRC는 재난 현장에서 직접 활약할 수 있는 로봇기술을 확인하는 자리였다. 원자력발전소 사고 같은, 인간이 접근할 수 없는 위험지역에 로봇을 투입해 밸브를 잠그고 소방호스를 연결하는 등의 최소한의 기본적인 복구 작업을 벌이도록 하고, 임무 달성도를 채점해 서로의 역량을 실험하는 자리다. 로봇이 인류를 구할 수 있는지, 그 역량을 살펴보는 첫 번째 각축전이 벌어진 것이다.
경합은 8개다. 초기 기획 단계부터 여러 차례 내용과 미션이 수정됐지만 결국 다음과 같이 최종 결정하고 진행 중이다.
▲장애물을 피하며 자동차를 운전한 다음, 내려서 걷는다 ▲경사길, 계단, 울퉁불퉁한 험지를 보행한다 ▲(각목 등의)장애물을 제거하면서 앞으로 나아간다 ▲손잡이를 비틀어 문을 열고 들어간다. 문은 3개로, 밀어서 여는 문, 당겨서 여는 문, 저절로 닫히는 문을 각각 차례로 통과해야 한다 ▲사다리를 기어 올라간다▲전동공구를 이용해 벽 일부를 삼각형 형태로 잘라낸다 ▲소방호수를 뽑아내 벽에 연결한다 ▲오염물질 유출을 막기 위해 3가지 모습의 밸브 3개를 모두 잠그는 것이다.

참가팀을 가장 골치 아프게 한 건 자동차 운전이다. 현재 기술로는 각종 첨단 센서를 주렁주렁 매단 무인자동차도 홀로 자율주행에 나서기가 꺼려진다. 이런 일을 자동차에 올라탄 로봇 한 대가 해결하라는 건 거의 불가능에 가깝다. 대부분이 시동을 걸어 주행하고 자동차를 세우면 받을 수 있는 기본점수(1점)만을 목표로 했다.
험지 주행도 쉽지 않은 과제였다. 언덕, 계단식, 울퉁불퉁한 산 등 다양한 경사면을 로봇이 걸어서 통과해야 한다. 샤프트 팀을 제외하면 험지 주행을 끝까지 완수한 팀은 한 곳도 없었다. 사다리 역시 까다로운 과제다. 그나마 문을 열거나 장애물을 치우고, 밸브를 잠그거나 소방호스를 연결하는 작업은 ‘도전해 볼만한 과제’로 꼽혔다. 물론 모든 일을 순식간에 해치울 수 있는 로봇은 없었다. 과제마다 15분의 준비시간과 30분의 실행시간 안에 이런 8개의 미션을 모두 완료해야 하는데, 로봇과의 통신속도가 수시로 달라지고, 심지어 통신이 끊어지는 악조건에서 실행해야 한다.
DARPA는 21일까지 행사를 진행한다. 2014년 말 열리는 최종 결선 진출이 확보되는 팀은 모두 8개로, 22일 이후 발표할 계획이다. 트랙D로 KAIST팀이 추가로 출전할 것을 감안하면 2014년말에는 모두 3개의 한국팀이 200만 달러의 최종 우승 상금에 도전하게 될 것으로 보인다.
오준호 KAIST 교수(휴머노이드로봇연구센터장)는 “충분한 경험을 얻었으니 내년 말에는 더 좋은 성적을 보여 줄 수 있을 것”이라며 “특히 내년에는 8개의 과제를 따로 따로 하지 않고 그대로 한 번에 진행해 성공여부를 가리는 ‘진검승부’를 벌인다는 점에서 과학적으로도 큰 의미가 있다”고 말했다.