태권V는 지구를 지키기 위해 악당들과 싸운다. 필살기인 이단옆차기는 악당에게 치명타를 입힌다. 56m의 큰 키에 몸무게 1400톤이나 되는 거대로봇이 어떻게 이단옆차기를 할 수 있을까. 해답을 구하기 위해 먼저 고려해야 할 점이 있다. 싸우는 장소가 ‘지구’라는 것이다.
지구에 있는 모든 물체는 뉴턴의 운동법칙을 따른다. 지구의 모든 물체는 지구 중력가속도의 지배를 받고 공기의 영향 속에 있다. 중력은 모든 물체를 무한정 높이 솟지 못하게 붙잡고 공중에 솟은 것을 땅으로 끌어내린다. 이런 물리법칙에 따라 지구의 모든 생물이 진화했고 인간이 만든 도구도 이에 거스르지 않도록 설계되고 공학적으로 완성됐다.
걸음은 진자를 거꾸로 매단 것
천리 길도 한 걸음부터. ‘걸음마’부터 생각해 보자. 걷는다는 의미를 물리학적으로 해석해 보자.
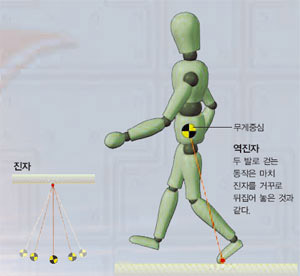
실에 추를 달아 놓은 것을 ‘진자’라고 한다. 벽걸이 시계에서 흔히 볼 수 있는 것 말이다. 사람을 거꾸로 뒤집어 발을 천정에 붙여 놓았다고 가정해 보자. 물론 생물학적으로는 피가 머리로 쏠리는 아픔을 감수해야 한다. 하지만 물리학적으로는 훌륭한 진자 실험이 된다. 다리는 진자의 실이 되고 몸은 추로 생각할 수 있다. 만약 이 장면을 물구나무서서 본다면 사람이 천정을 딛고 있는 것처럼 보일 것이다.
이족보행을 하는 인간이 한 발로 서 있으면 마치 땅에 거꾸로 매달아 놓은 진자 같다. 이런 모델을 ‘역진자’라고 하는데, 매우 불안정하기 때문에 자연스레 쓰러지게 된다. 사람이 서 있다가 쓰러질 때 다른 한 발을 내딛는 동작을 반복하면 비로소 걷게 된다. 역진자 상태를 계속 되풀이 하는 것이다.
이제 조금 복잡한 계산에 도전해 보자. 여기 등장하는 대부분의 계산은 고등학교 물리 교과서에서 쉽게 볼 수 있다. 먼저 걷는 속도를 생각해 보자. 걷는 속도는 걸음 빈도(얼마나 빨리 발을 바꾸는가)와 보폭에 비례한다. 즉 걸음빈도와 보폭을 곱한 값이 걷는 속도가 된다. 보폭과 걸음 빈도는 중력과 키에 따라 결정된다.
로봇 ‘휴보’를 만든 KAIST의 휴머노이드로봇연구센터(Hubo lab)에서 실험한 결과 인간이 걷는 자연스러운 빈도(R)는 비례상수(k)와 고유진동수(f)의 곱으로 나타났다(R=k·f). 여기서 R은 1초당 걸음 빈도(단위 : Hz)고 f는 걷기를 진자 운동으로 볼 때 진자의 고유진동수다. k는 걸음 형태에 따라 보통 2(천천히 걷기)와 6(빨리 걷기) 사이 값으로 결정된다.
고유진동수를 결정하기 위해서는 중력가속도(g=9.8m/sec²)와 땅에서부터 무게중심까지의 거리(ℓ)가 사용된다($f=\frac{1}{2π}\sqrt{\frac{g}{l}}$). 그리고 보폭(D)은 실험을 통해 얻은 수치에 비례상수와 키(H)를 곱한 값(D=0.12k·H)으로 나타낸다.
예를 들어 사람의 키가 1.7m일 때 무게 중심은 대략 배꼽 위치에 있으므로 발바닥부터 무게 중심까지의 거리는 약 1m(l=0.6H)다. 이 경우 고유진동수(f)는 약 0.5Hz가 된다. 보통 실외에서 걸을 때 k를 3.3 정도로 생각하면 걸음 빈도는 초당 1.65회가 되고, 보폭은 0.67m다. 그러므로 걷는 속도는 시속 4km 정도가 된다(V=R·D=1.65회/초×0.67m=1.1055m/s=3.9798km/h).
태권V의 걸음 속도는 어떻게 될까? 애니메이션에 나온 태권V의 신체조건처럼 키 56m, 무게중심까지의 거리를 33.6m라고 할 때 고유진동수는 0.086이 되고 1분에 18회를 걸으며 23.6m의 보폭에 시속 25.6km로 이동한다.
사람의 걸음 속도 공식에 따르면 걷는 속도는 키의 제곱근에 비례한다. 이 공식을 태권V의 달리기에 그대로 적용하면 사람보다 33배 큰 태권V는 사람(시속 4~20km)의 6배 정도인 시속 25km (k=3.5)~ 120km(k=8)로 빨리 달릴 수 있을 것이다.
만약 태권V가 더 빨리 달리려고 하면 운동학적, 동역학적 문제뿐 아니라 매우 큰 공기저항에 직면하게 된다. 아무리 빨리 달려봤자 고속도로의 제한 속도를 조금 넘을 뿐이니 태권V가 가는 길은 정말 멀고도 험하다.
빨리 달려야 시속 120 km
태권V는 적을 제압하기 위해 특기인 이단옆차기를 한다. 애니메이션에 등장하는 유도 로봇이나, 펜싱 로봇들도 태권V의 이단옆차기 앞에서는 한방에 무너지고 만다. 태권V가 그런 무시무시한 이단옆차기를 하려면 얼마나 큰 힘이 필요할까.
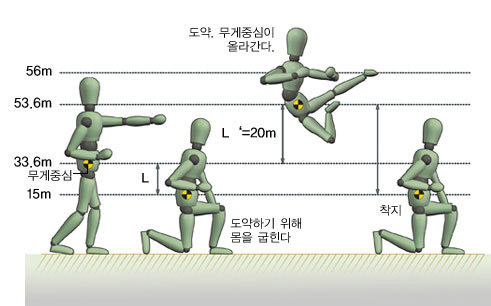
이단옆차기는 몸의 무게중심을 눈 높이 정도로 띄워올리면서 몸을 지면과 수평자세로 만들고 다리를 쭉 펴면서 발로 차는 동작이다. 착지 전에는 몸의 균형을 잡기 위한 준비를 마쳐야 한다.
먼저 도약속도와 공중에 머무는 시간을 구해보자. 이 값들은 도약 높이에 따라 결정된다. 도약 높이(L')를 무게중심에서 눈 높이까지의 거리로 대략 20m라고 하면, 도약속도(u)는 자유낙하운동 공식($u=\sqrt{2gL'}$)에 따라 19.8m/sec다. 이 속도를 얻기 위해서는 무릎을 완전히 굽혔다가 힘차게 몸을 위로 솟구치게 뻗어야 한다. 즉 무게중심을 15m 높이까지 낮췄다가 원래 높이인 33.6m까지 위로 가속시킨다.
이때 도약 속도를 얻기 위한 가속도(a)를 계산해 보면 10.54m/sec²가 된다($a=\frac{{u}^{2}}{2L'}$). 이를 필요한 힘으로 환산해 보면 도약력(F)은 2886톤이 돼(F=m(a+g) (N)=1400000(10.4+9.8)/ 9.8(kg)= 2886톤) 원래 무게 1400톤의 약 2배 힘이 필요하게 된다.
체공시간(T)은 몸이 상승하는 시간 2.02초($\frac{\sqrt{2L'}}{g}$), 몸이 바닥까지 떨어지는 낙하시간이 2.8초($\frac{\sqrt{2(L'+L)}}{g}$)로 이단옆차기의 경우 단 4.82초 만에 모든 동작이 완성돼야 한다. 체공시간을 늘리기 위해서는 도약 높이를 증가시켜야 하고 그러기 위해서는 더욱 큰 도약력이 필요하다.
2002년에 발사한 우리나라 최초의 액체추진로켓 KSR-Ⅲ의 경우 추력이 13톤이었다. 태권V가 이단옆차기를 하려면 KSR-Ⅲ 로켓이 222개 이상 필요하다.
다른 효과적인 발차기 공격에는 옆차기와 돌려차기가 있다. 옆차기와 돌려차기 동작도 이단옆차기에서와 비슷한 계산으로 유추해 볼 수 있다. 하지만 이 동작들은 몸을 회전해야 하기 때문에 몸의 ‘회전관성 모멘트’를 알아야 한다.

돌려차기는 회전관성 모멘트 알아야
회전관성 모멘트란 회전하는 물체가 그 모양이나 질량에 따라 회전하는 속도가 달라지는 것이다. 피겨스케이팅 선수가 회전할 때 손과 발이 그리는 모양에 따라 회전하는 빠르기가 달라지는 것도 이 때문이다.
태권V와 사람은 비슷한 무게 분포를 갖고 있으므로 각각 같은 비례의 질량과 회전관성 모멘트를 갖는다. 따라서 자연스러운 동작을 위해 걸음걸이와 마찬가지로 키의 제곱근(√33≒6)에 비례하는 시간인 2~6초(사람의 경우 0.3초~1초)가 필요하다.
태권 동작을 2~6초에 마치려면 약 1g(≒10m/sec²)의 가속도를 내야 한다. 만약 동작이 중력과 같은 방향인 경우 중력만큼의 하중이 추가 된다. 이 정도의 구동력은 적절한 구동기(Actuator)와 구동원(Power source)만 갖춘다면 충분히 가능하리라 본다.
태권V가 발차기를 하기 위한 물리적인 계산을 해 봤다. 머리가 조금 복잡해도 지구의 평화를 지키기 위해 참자. 하지만 문제가 하나있다. 이 거대한 로봇을 ‘어떻게’ 움직여야 할까.
사람이 어떤 동작을 하려면 크게 두 요소를 결합해야 한다. 하나는 미리 계획된 동작 패턴에 따라 다리, 발목, 팔을 움직여 동작의 기본형을 만드는 것(동작 경로 계획)이고, 다음은 매 순간 몸의 각 부분을 미세하게 움직여 지속적으로 동적 안정성을 유지하는 것(자세 안정화)이다.
전자는 동작 전에 미리 익혀야 하는 과정(Off-line 또는 Batch process)이고 후자는 동작을 하면서 실시간(On-line 또는 Real time control)으로 계산해야 한다.
움직여라 태권V
태권도도 먼저 기본 동작을 익힌다. 그리고 부단한 연습을 통해 연속동작이 몸에 배게 한다. 또한 실전에서는 이런 동작을 조금씩 변형해 효과적인 공격과 방어를 한다. 이때 예측하지 못한 뜻밖의 상황에서도 항시 몸의 중심을 유지하는 것이 매우 중요하다.
로봇의 경우도 마찬가지다. 태권 동작은 미리 프로그램 돼 로봇이 기억해야 한다. 이런 기본 동작패턴을 ‘모션 프리미티브’(Motion Primitive)라고 한다.
일단 모션 프리미티브가 완성되면 로봇은 앞차기, 돌려차기 같은 독립적인 명령을 이해하고 수행할 수 있다. 태권도 경기에서 감독이 선수에게 동작 지시를 내리는 것과 비슷하다. 동작 명령이 전달되면 로봇은 동작을 수행하게 되고 이를 실제 공격 또는 방어효과가 있는 동작으로 만들기 위해서는 로봇 스스로가 판단해 움직이면서 자세를 안정시키고 정확한 공격점을 공략해야 한다.
이렇게 상황에 따라 실시간으로 제어하기 위해서는 큰 힘을 내면서 매우 빠르고 정확하게 작동하는 구동시스템과 로봇의 자세를 정확히 인식할 수 있는 정밀 관성센서, 힘/모멘트 센서들이 필요하다. 또한 실시간으로 사물과 사물의 속도, 거리 등을 인지할 수 있는 인공지능 알고리듬도 개발해야 한다.
매우 역동적으로 움직여야 하기 때문에 동적 안정성을 유지하는 것은 매우 중요하다. 거대 로봇은 한번 넘어지면 엄청난 충격을 받기 때문에 쓰러지지 않도록 항상 중심을 유지해야 한다.
사전 동작요소 프로그램 기술과 실시간 환경대처 자세제어 기술을 구현하는 데는 아직 기술적 제한이 많다. 로봇도 사람과 마찬가지로 스스로 학습능력이 있어야 한다. 또 사람과 유기적이고 효과적인 의사전달을 위해서는 최근 한창 연구 중인 뇌과학 기반 인공지능 기술이나 뇌파-로봇 동기 기술, 학습제어 기술이 로봇제어기술과 결합돼야 한다.

달려라 달려 로보트야~ 날아라 날아 태권
애니메이션 태권V를 보면 첫 부분에 가수 최호섭이 부른 태권V 주제가가 나오면서 제작진 소개가 나온다. 그 중 눈에 띠는 이름이 ‘왕호체육관 유승선 사범’이다. 40년 넘게 태권도와 인연을 맺은 유 사범은 우리나라 태권도 역사와 일생을 함께 한 인물. 1970년대 초 체육관 관장을 하면서 서울 수유리 근처 산에서 ‘유수회’라는 이름으로 사람들에게 태권도를 지도했다. 참가한 사람들 중에 신상옥 영화감독의 ‘신필름’ 관계자가 있어 배우들 무술 지도를 맡게 됐고 자연스럽게 태권V까지 맡게 됐다.
“태권V를 제작할 때 문화공보부에서 태권도를 등장시키려면 정통 태권도사범의 지도를 받으라는 지시가 있었어요. 액션영화 무술지도를 했던 제게는 큰 영광이었죠.”
태권도가 국기로 인정받아 국기원이 설립된 때는 1972년. 태권도를 만화영화로 표현하는 것 역시 많은 관심을 모았다. 이에 유 사범은 직접 시범을 보이며 태권V의 동작을 만들어 갔다.
“태권도 기본자세를 보면 하나하나 의미가 있습니다. 주먹을 말아 쥔다든지 손끝에 힘을 줘 구부리는 동작은 힘을 더 크게 만들고 주먹이나 발도 회전시켜 힘을 짜낸답니다.”
태권V는 주인공인 훈이와 서로 교감하며 태권도로 악당을 제압한다. 하지만 진정한 교감을 한 주인공은 유 사범이 아닐까. 그런 점에서 태권V의 태권도 실력은 유 사범과 같을 것이다.