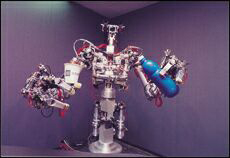
KIST가 94년부터 개발에 몰두해온 휴먼로봇 ‘센토’의 1차 모델이 공개됐다. 이번에 발표된 시스템은 오는 99년에 끝나는 1단계 계획 중 중간 결과물로, 로봇 상체, 보행기구, 원격제어의 3개 시스템으로 구성돼 있으며, 여기에 총 73개의 모터와 1백60개의 센서, 6개의 CPU 보드가 장착됐다.
말의 몸뚱이에 사람의 상체가 붙은 형상을 한 그리스 신화의 괴물 이름을 딴 센토는 네 발과 두개의 팔을 갖추고 있으며, 머리 부분에는 4대의 카메라가 달려 있다. 여기에 작업 현장에서 멀리 떨어진 곳에서도 로봇을 자유롭게 조종할 수 있는 원격 제어시스템을 갖추고 있다.
센토의 가장 큰 특징은 이전에 발표된 로봇보다 한결 움직임이 부드러워졌다는 점. 이를 위해 연구진은 새로운 운동 알고리즘을 개발하는 한편, 팔과 허리, 손의 구조를 인간의 관절 운동에 가깝게 설계해냈다.
제한된 환경에서 반복작업을 하는 산업용 로봇과 달리 자신이 처한 환경을 스스로 인식하고 판단해 자유롭게 움직이는 휴먼 로봇은 원자력발전소 내부나 해저 등의 극한 작업과 인력난이 심한 분야 등에 폭넓게 활용될 수 있다.
KIST는 센토의 개발이 완성되면 2단계로 인간의 지능과 감각을 흉내내는 '휴머노이드'(인간을 닮은 로봇)개발에 돌입할 예정이며, 또 수술용 로봇과 같은 마이크로로봇 개발에 도전할 계획이다.