로봇의 머리 몸 눈 팔 손에 해당하는 부위는 어떤 원리로 작동하나.
인간의 모습을 하고 인간처럼 행동하는 로봇은 예나 지금이나 꽤 인기가 있다. 실제로 인간을 많이 닮은 로봇에 대한 수많은 공상과학소설이 나왔다.
로봇을 주제로 한 첫 번째 소설은 메리 셀리가 지은 '프랑켄슈타인'이다. 1817년 영국에서 발표된 이 작품은 인조인간을 만들어내려는 프랑켄슈타인박사의 노력을 담고 있다. 이 소설은 큰 인기를 모아 영화화되기도 했다. 영속의 프랑켄슈타인이라는 괴물은 선의의 창조물이라는 본래의 의도와는 거리가 멀었다. 그 흉측한 인상은 수백만 사람들의 기억속에 자리잡아 로봇에게까지 이어졌다. 로봇 역시 미쳐 날뛸 수도 있다는 우려가 사람들의 마음에 심어진 것이다.
1910년 체코슬로바키아의 극작가 카렐 차펙의 연극 '로섬 만능로봇 제조회사'에서 로봇이라는 말이 생겨났다. 체코어로 '로보타'(robota)는 '일을 강요받는 노동자'(forced laborer) 또는 '노예노동자'(slave laborer)를 뜻하는데 영어로 번역되면서 로봇이 됐다.
이 연극은 뛰어난 과학자 로섬과 그의 아들이 원형질에 가까운 화학물질을 개발하면서 시작된다. 그들은 인간에게 무조건 복종하고 모든 육체적 노동을 대신해줄 로봇을 만들고자 했다. 여기서 차펙은 '인간의 형상을 갖고 인간의 두배 이상 열심히 일할 수 있는 기계'로 로봇을 묘사했다. 몇번의 거듭된 보완작업 끝에 마침내 완벽한 로봇을 완성한다. 그러나 점점 로봇은 일을 싫어하게 돼고 주인에게 반기를 든다. 결국 모든 인간을 죽이는 흉측한 '기계괴물'로 묘사되면서 막이 내린다.

다정하게 다가와
미국의 과학소설작가 아이작 아시모프는 1939년이래 로봇에 대한 많은 작품을 썼다. 우리가 로봇에 관한 학문을 칭할 때 사용하게 되는 '로보틱스'란 용어도 그가 만들어냈다. 그의 작품속에 등장하는 로봇은 정교하게 디자인된 안전한 기계이며 세가지 원칙에 따라 움직인다.
첫째 로봇은 절대로 인간을 해칠 수 없고 고의로 활동을 멈춰 인간에게 해를 주어서도 안된다.
둘째 첫 번째 원칙에 위배되는 경우를 제외하고는 인간의 명령에 거역할 수 없다.
셋째 첫째 둘째 원칙에 위배되지 않는다면 로봇은 스스로를 보호해야 한다.
텔레비전이나 영화를 통해 로봇은 참으로 다양한 모습으로 우리에게 다가왔다. 때로는 충성스런 하인, 때로는 친구의 모습으로 표현됐다.
1951년에 상영된 '지구가 멈추는 날'이라는 영화에서는 지구촌에 평화를 정착시키기 위해 비행접시를 타고 먼 외계로부터 오는 사절단이 등장한다. 탑승인은 단 두사람. 인간을 닮은 외계인과 전지전능한 로봇, '고트'다. 그 로봇은 우주의 평화수호자로 행동했다. 고트는 비록 지구에서의 임무를 완벽하게 수행하지는 못했지만 미래의 무기가 지닌 끔찍한 파괴력을 보여주는 데는 성공했다.
1968년에 제작된 영화 '2001'에 나오는 우주선 '오디세이'호에는 기계적 로봇은 출현하지 않는다. 대신 고도의 지능을 지니고 말을 할 수 있는 컴퓨터 할(HAL)이 등장한다. 이 컴퓨터가 맡은 임무는 우주선의 모든 계기들을 감시하고 제어해 목적지인 목성까지 무사히 도착하도록 하는 일이다. 또 탑승객들의 벗이 되어 주기도 한다.
그러나 여행이 계속되는 동안 할의 회로에 이상이 생겨 성격이 포악해진다. 할은 스스로를 보호하기 위해 인간동료들을 죽이기 시작했고, 남은 인간과의 마지막 싸움에서 결국 멈춰버리고 만다.
영화 '스타워즈'(Star Wars)시리즈는 다정하고 해가 없는 로봇을 묘사하는 데 성공했다. 등장하는 로봇 R2D2와 C3PO는 회전운동을 할 수 있고 고도의 지능을 갖췄으며 인간과 대화를 나눌 수 있다. 이 두 로봇은 코믹스런 모습을 하고 있다. 비록 영화속에서 중요한 역을 맡은 것은 아니었으나 관객들이 자비로운 그들의 행동을 보고 로봇에 대해 친근감을 갖게 됐다.
또 로봇이 제공하는 혜택이나 다른 진보적인 기술이 매우 유용한 것이며 결코 위협적인 것이 아니라는 생각을 갖게 해주었다.
적어도 6자유도는 확보해야
일반적으로 로봇은 그 응용분야에 따라 여러 형태로 나누어 생각할 수 있다. 그중 가장 주목받는 로봇의 형태는 공장 자동화 시스템(FA system)의 생산성 향상에 중추적인 역할을 하고 있는 산업용 로봇(industrial robot)이다. 지금부터 이 산업용 로봇의 구조, 종류 및 기능 그리고 동작원리 다시 말해 로보틱스 전반에 걸쳐 알아보자.
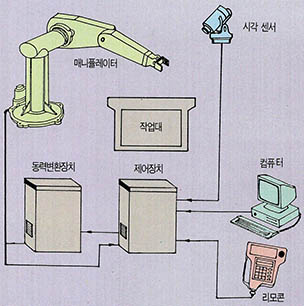
보통 산업용 로봇은 매니퓰레이터(manipulator) 센서(sensor), 제어장치(controller), 그리고 동력 변환장치(power conversion unit) 등 4개의 중요한 부분으로 구성된다. 이 4개의 부분은 서로 긴밀한 관계에 있을 뿐 아니라 각자의 독특한 기능을 갖고 있다.
매니퓰레이터는 사람의 팔에 해당되는 부분으로서 산업용 로봇은 이 매니퓰이터를 활용, 물건을 옮기거나 정교한 조립 작업을 한다. 이 매니퓰레이터는 기저부(base), 즉 바닥에 몸체(body)가 부착되어 있고 그 위에 팔(arm)이 연결되어 있다. 또 팔끝에는 손목(wrist)이 있으면, 손목에는 매니퓰레이터가 해야하는 작업에 맞게 설계된, 사람의 손에 해당하는 말단 효과장치(end-effector)가 장착돼 있다.
사람이 물건을 잡거나 옮기려면 어깨 팔꿈치 손목 손가락 등이 있어야 하는 것처럼 매니퓰레이터도 자유도(degree of freedom)라는 것이 필요하다. 자유도는 매니퓰레이터의 각 관절들(기저부와 몸체, 몸체와 팔, 팔과 손목 등)을 연결시키는 부위의 숫자와 동일한데, 공간상에서 자유롭게 움직이기 위해서는 최소한 6자유도가 필요하다.
그러나 매니퓰레이터는 항상 사람의 팔처럼 고정된 형태를 갖고 있는 것은 아니다. 이것은 공장 자동화시스템에 맞도록 설계되는데 여기에는 직교좌표형 원통좌표형 극좌표형 다(多)관절형 등이 있다. 그중 조립 용접 등의 생산라인(line)에 가장 널리 쓰이는 형은 원통좌표형과 극좌표형이다.
스스로 수정해 가면서
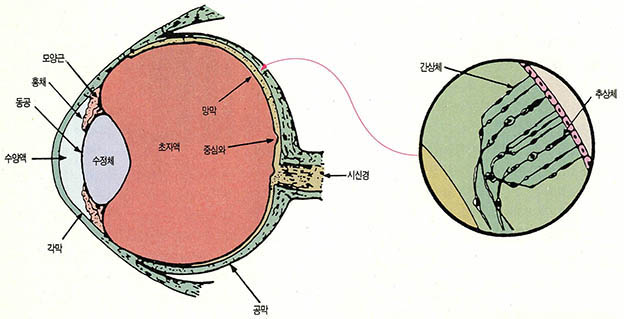
사람의 눈과 같이 외부로부터 정보를 받아들이는 부위가 바로 로봇의 센서다. 대표적인 센서로는 매니퓰레이터 자체의 상태를 감지하는 광학감지기(encoder), 위치계(potentiometer) 속도계(tachometer), 그리고 매니퓰레이터 주위의 상태를 살피는 CCD와 CID 카메라 등을 꼽고 있다. 이들중 광학감지기와 위치계는 매니퓰레이터 관절의 위치를 알아내는데 쓰이고, 속도계는 관절의 속도를 감지하는데 사용된다.
CCD나 CID카메라는 사실상 산업용 로봇시스템의 가장 중요한 부품중의 하나다. 산업용 로봇이 주변의 환경이나 현재 자신이 하고있는 일 등을 파악할 수 있는 유일한 수단이기 때문이다.
한편 제어장치는 로봇이 센서를 통해 받아들인 자료를 처리하는 기능을 갖고 있다. 만약 어떤 사람이 길을 가다가 주위환경 등을 보고 길을 잘못 들어왔음을 인식했다고 가정해 보자. 그러면 사람의 머리(뇌)는 순간적으로 올바른 길을 찾아 갈 수 있도록 두 다리에 명령을 할 것이다.
제어장치도 바로 이런 기능의 소유자다. 매니퓰레이터가 열심히 작업을 하다가, 매니퓰레이터 자체의 기계적인 특성 또는 외부로부터의 방해 때문에 올바른 작업을 하지 못할 경우도 있을 것이다. 이때 제어장치는 센서로부터 그 사실을 보고받아 매니퓰레이터가 올바로 작업할 수 있도록 한다. 요근래에는 마이크로프로세서(micro processor)의 발달로 매니퓰레이터의 아주 미세한 잘못까지도 빠르게 수정할 수 있는 제어장치가 속속 개발되고 있다.
산업용 로봇 '4인방' 중 하나인 동력변환장치(power conversion unit)는 매니퓰레이터가 움직이는데 필요한 에너지를 공급하는 곳이다. 알다시피 매니퓰레니터의 관절은 전기적인 모터(motor)에 의해 가동된다.
보통 AC모터 스테핑(stepping)모터 DC모터 등이 널리 쓰이고 있는데 이들은 저마다의 특징이 있다. 먼저 스테핑모터에 대해 알아보자. 이 모터는 제어를 간단히 할 수 있다는 장점이 있다. 그러나 매니퓰레이터의 작업도중 궤환(feedback)이 없는 개방형 모터이므로 잘못된 부분이 있을 때 이를 수정하기 곤란한 단점도 있다. 반면 AC모터는 부피가 크고 값이 비싸다는 치명적인 약점이 있다.
끝으로 DC모터는 제어하기는 다소 어려우나 값이 싸고, 소형이라는 점이 유리하다. 그리고 폐쇄형회로(closed loop)를 꾸밀수 있어 매니퓰레이터의 잘못된 작업을 쉽게 수정할 수 있다.
이들은 모두 전기적인 신호, 즉 전류에 의해 작동한다. 따라서 동력 변환장치는 제어장치에 의해 수정된 궤환신호를 전기적인 신호로 변환시켜주는 장치라고 정의내릴 수 있다.
이처럼 산업용 로봇은 4개의 기본적인 구성를 갖고 있으나 또 하나 절대 빼놓을 수 없는 중요한 부분이 있다. 바로 컴퓨터다. 미국의 RIA(Robotics Institute of America)에 따르면 산업용로봇은 '프로그램된 동작을 반복함으로써 다양한 임무를 수행하도록 설계된 기계적 매니퓰레이터'로 정의된다. 그러므로 산업용 로봇이 미리 짜여진 프로그램에 따라 어떠한 일을 하도록 명령해주는 부분이 있어야 하는데 이것이 바로 컴퓨터인 것이다.
컴퓨터가 로봇에게 하는 명령은 무작정 내려지는 것이 아니다. 다시 말해 산업용 로봇의 동작원리에 근거해 명령을 하달해야 한다.
이번에는 산업용 로봇의 동작원리를 알아보자. 매니퓰레이터가 공간상에서 작업할 때, 만약 어떤 물체 때문에 방해를 받는다면 매니퓰레이터는 이 방해물을 피해서 작업을 해야 할 것이다. 이렇게 공간상에서 매니퓰레이터의 말단효과장치(로봇의 손)가 가야 할 길을 정하는 일을 공간상에서의 경로선정이라고 한다.
보통 이 길들을 직선으로 잡아준다. 그러나 매니퓰레이터는 많은 관절(6개이상)들을 갖고 있으므로 '로봇 손'이 선정된 길을 착오없이 따라가는 문제는 상당히 어렵다. 이 문제는 전문적인 지식을 필요로 하는 학문분야인데 여기서는 아주 개략적으로만 살펴보자.
2000년대의 학문
선택된 길을 매니퓰레이터의 '로봇 손'이 정확히 찾아 가기 위해서는 매니퓰레이터의 관절들이 원활하게 움직여줘야 한다. 관절은 적어도 6개 이상인데(공간상에서 작업을 할 경우) 이들을 잘 조합하면 '로봇 손'은 주어진 길을 제대로 따라 갈 수 있다. 이때 역 기구학(inverse kinematics)이라는 학문의 도움을 받는다. '로봇 팔'이 가야만 하는 길의 위치와 방위(자세)가 주어졌을 때 이를 시행하기 위한 관절의 각을 역기구학을 활용할 산정해내는 것이다. 그러나 매니퓰레이터의 관절들은 모터에 의해 움직인다는 사실을 잊어서는 안된다. 관절들이 요구하는 만큼의 각을 얻기위해 모터에 어느 정도의 토크(torque, 모터에 주는 회전력)를 가해줘야만 하는지 알아야 한다. 이것은 보통 역동역학(inverse dynamics)을 이용하면 얻을 수 있는데, 간략하게 다음과 같이 표현할 수 있다.
원하는 관절각을 얻기위한 토크=관성×(원하는 관절 가속도)+(원심력+코리올리힘)×(원하는 관절속도)+중력으로 표시된다. 이 식에서 관성 원심력 코리올리힘(지구 자전에 의해 자전축의 회전방향으로 생기는 힘) 그리고 중력들은 모두 원하는 관절각의 함수로 돼 있다. 이렇게 하면 매니퓰레이터의 '로봇 팔'이 제대로 길을 가기 위한 관절들의 각을 얻을 수 있다.
하지만 매니퓰레이터는 기계적인 시스템이므로 그 특성상 오차가 발생할 수 있다. 요즘에는 이런 문제를 해결하기 위해 매니퓰레이터의 관절에 자체 모터가 달린 직접 구동방식의 매니퓰레이터도 등장하고 있다. 기존의 간접구동방식은 관절과 관절을 움직이는 모터가 체인이나 벨트에 의해 연결돼 있으므로 기계적 오차가 비교적 크게 발생한다.
그러므로 산업용로봇은 이 오차(요구되는 관절각과 실제 관절각과의 비교차)를 센서로부터 받아들인 뒤 이를 제어장치로 보낸다. 그러면 제어장치에서는 오차를 없애기 위한 새로운 토크를 발생시키는 운동제어를 한다.
운동제어의 방식에는 선형보상기와 같이 간단한 것부터 최적제어방식처럼 복잡한 것까지 여러 가지가 있다.
이처럼 산업용로봇은 복잡하고 어려운 과정을 거쳐야 비로소 동작을 하게 된다. 하지만 이런 산업용 로봇은 비교적 단순한 로봇이라고 말할 수 있다. 그만큼 오늘날의 로봇산업은 눈부신 발전을 하고 있다.
최근에는 산업용 로봇 뿐만 아니라 지능형 로봇까지 각종 전시회나 TV 매체 등을 통해 자주 접하고 있다. 그러나 이렇게 눈부신 발전을 하고 있음에도 불구하고 로봇은 지금 당장보다는 2000년대에 꽃필 수 있는 분야다. 로봇은 전자 기계공학은 물론이고 컴퓨터 재료공학 등이 집대성되어야 발전할 수 있다.
따라서 2000년대에 로봇산업의 선진화를 이루려면 무엇보다 로봇에 관계하는 여러분야의 연구가들이 상호 협력해 연구를 해야 한다. 끝으로 이 분야에 관심있는 학생들이 기초지식을 철저하게 습득, 21세기 로봇산업의 주역이 되기를 바란다.