1920년에 체코의 작가 '칼 차팩'에 의해 현대문명을 풍자한 희곡, RUR(Rossum's Universal Robots)에서 로봇이란 말이 나온 이래 로봇의 활용은 현 산업사회의 필수적 구성요소로 등장했다.
이러한 로봇의 역사는 기원전에서 부터 시작, 15C 이후 유럽에서의 자동인형들, 18C경 일본의 조종형 인형들에서 찾아볼 수 있다. 특히 1940년대 이후에는 원자력발전소를 중심으로 실용화되기 시작한 매직 핸드(Master-Slave Manipulator, 방사성물질과 같은 위험한 물체의 취급에 사용됨) 작업을 하는 원격조종로봇(Tele-Operator)이 쓰이기 시작했다. 이것이 바로 산업용로봇의 시초라 할 수 있다.
1970년대부터는 산업사회의 요청으로 용접 도장 조립 등을 행하는 산업용로봇이 곳곳의 공장에서 쓰이기 시작했다. 최근에는 전자공학의 발달과 함께 산업용로봇뿐아니라, 해저탐사 우주개발 서비스산업 등의 특수작업을 할 수 있는 지능을 갖춘 로봇의 개발에도 많은 관심을 갖게 되었다.
산업적으로 널리 쓰이는 산업용로봇에 관해 먼저 알아보고 지능로봇의 개념과 종류, 그리고 그 장래에 대해 조명해보자.
산업용로봇에서 지능로봇으로
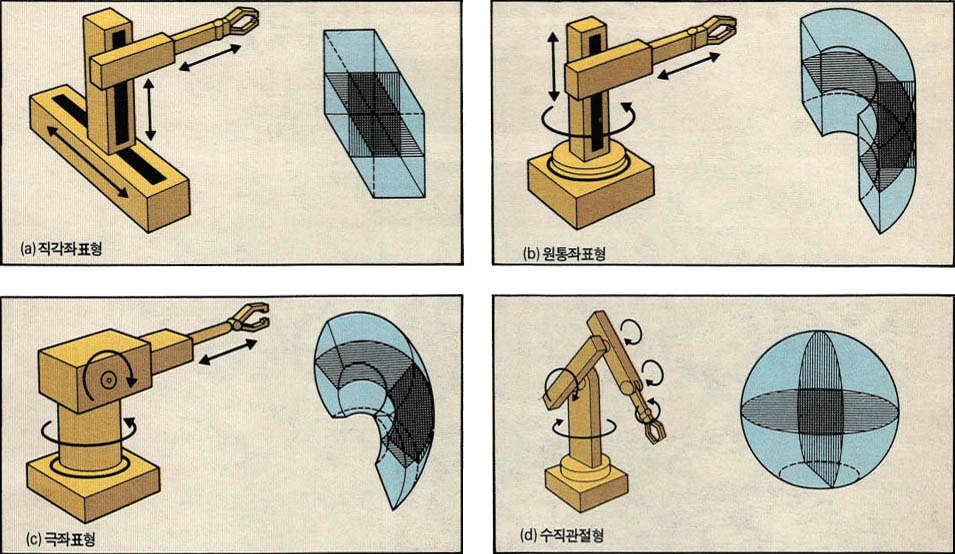
로봇은 오래전 부터 인간의 구조를 닮게 만들어졌다. 특히 산업용로봇은 인간의 작업을 흉내내면서, 보다 빠르고 정확하게 주어진 일을 수행시키기 위해서 인간의 팔과 비슷한 구조로 만들어져 있다. 이와 같은 산업용로봇의 형태를 분류하여 보면 (그림 1)과 같다.
(a)는 직각좌표형 로봇으로 종 횡 높이의 3차원 공간내에서 작업이 가능하도록 돼있다. 구조가 간단하면서도 동작제어가 쉬우며 작업 정밀도도 높다.
(b)는 원통좌표형으로 옆으로는 허리와 같이 회전하도록 되어있다. 허리부분의 상하 굴절운동은 없지만 직각좌표형과 마찬가지로 상하운동으로 그 방향의 작업이 가능하다.
(c)는 극좌표형 로봇을 나타내고 있다. 이 로봇의 팔은 대포의 포신의 움직임을 닮았고 그 동작영역이 넓으며 사각방향으로의 작업이 쉬워서 스폿용접 등에 이용된다.
(d)는 수직관절형 로봇이다. 모든 방향을 자유로 움직이면서 작업을 할 수 있기 때문에 그 용도가 다양하다. 또한 공장에서 부품의 조립 이동 등에 잘 쓰이도록 최근에는 수직 다관절형 로봇이 개발되고 있는 추세이다.
산업용로봇 시스팀과 그 내부구조를 다관절형 로봇을 통하여 알아보자. 로봇은 그 본체와 옴직임을 지령하는 제어장치로 되어 있다. 또한 로봇에 동작순서를 가르쳐 주기위한 교시판이 제어부분에 붙어 있으며, 로봇 본체에는 관절을 움직이기 위해 모터가 그 관절의 수만큼 사용되고 있다. 그리고 움직임을 정확히 하거나 부드럽게 하기 위해 내부센서들이 각 관절수만큼 모터쪽에 붙어서, 모터의 회전각도 속도 등을 측정하고 있다.
로봇의 각 관절의 독립적 움직임을 자유도라고 부르며, 하나의 자유도는 굴절이나 회전 신축 등의 한 움직임을 나타낸다. 자유도가 많을수록 복잡하고 자유로운 움직임이 가능하지만 그만큼 제어는 곤란하게 된다. 일반적으로 다관절 산업용 로봇은 5~6개의 자유도를 가지고 있어서 7개의 자유도를 가진 인간의 팔과 같은 역할을 하고 있다.
이와 같은 산업용로봇은 실제로 여러분야에 응용되고 있으며 전자산업 등에서 운반 조립은 물론 자동차 산업에서의 용접 도장 등에 널리 쓰이고 있다.
스스로 작업환경을 이해
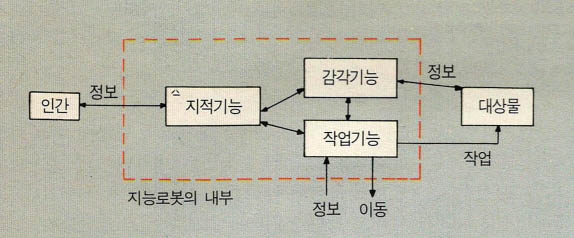
지능로봇이란 "감각 기억 또는 사고 등의 기능을 어느정도(?) 이상 갖추고 주어진 작업을 계획하고 수행할 수 있는 로봇"이라고 정의할 수 있다. 이러한 지능로봇의 구성을 보면 (그림 2)와 같다. 즉 지능로봇이란 감각기능 등을 통해 작업환경을 이해하고, 이를 로봇 자신이 가지고 있는 지식과 경우에 따라서는 인간으로부터 얻은 정보 등으로 판단하여 작업을 계획 수행하는 자율적 로봇이라고 말할 수 있다.
지능로봇은 단순작업을 하는 산업용로봇과는 달리, 적어도 손(매니풀레이터) 다리 센서 계산기 등의 하드웨어와 손과 다리의 제어, 시각 촉각센서 등의 처리작업, 인공지능(AI)등의 소프트웨어를 갖추고 있어야 한다. 지능로봇에 관한 연구는 최근에 와서 관심이 고조됐으나 일부에서는 연구개발 단계에서 벗어나 실용화단계에 접어들만큼 급속히 발전하고 있다.
지능로봇은 그 외부 형태가 인간의 모양을 닮지 않았다 하더라도 이상과 같은 내부구조를 가지고 특수한 목적의 작업을 지능적으로 수행할 수 있도록 설계돼 있다고 보면 틀림없다.
원자력발전소의 로봇부터 낚시로봇까지
지능로봇은 많은 경우 아직은 연구개발단계에 있지만 분야에 따라서는 특수작업을 위한 전용지능 로봇으로 실용화되고 있다. 이제부터는 현재 개발 중이거나 실제 사용되고 있는 지능로봇들을 알아보자.
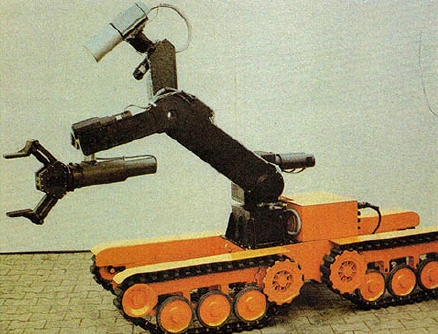
지능로봇중 초기의 대표적인 작품은 서독 국립 원자력연구센터와 '블로허 모터'(Blocher Motor)사가 개발한 것으로 방사능 위험물 장애물 등 나쁜 환경 하에서 작업이 가능하도록 설계된 '원격조절로봇'(Manipulator Vehicle MF system)이다(사진참조).
이 로봇은 완전히 자율적으로 움직이지는 않지만 원격조작을 통해 주어진 명령에 따라 여러모양의 이동을 한다. 작업수행은 텔리비전카메라를 통해 감독이 가능하다. 지난번 소련의 체르노빌 원자력발전소화재 때에도 유용히 사용된 바있다.
또한 특징있는 지능로봇 중의 하나가 자동적으로 낚시를 하는 낚시로봇이다. 내장된 컴퓨터로 배의 흔들림 속도, 그리고 물고기의 크기 무게를 감지하여 마치 사람과 같이 낚시를 행한다. 이 로봇은 가로 30cm, 세로 36cm에 높이는 60cm이며 중량이 약 65㎏으로 여기에 3~4m의 낚시대가 연결되어 있다. 참치 등의 물고기가 걸리면 이를 감지 판단하여 유압조절로 낚시대를 들어올리게 된다.
맹인의 안내를 위한 특수로봇도 있다. 이른바 맹도견(盲導犬)로봇. 맹인의 명령에 따라 직진 회전으로 안내를 하며, 장애물이 있을 경우에는 맹인에게 이를 알려주면서 멈추게 되어있다. 그리고 맹인과 약속된 정보를 상호 전달할수 있는 '인간-기계 인터페이스'(man-machine interface)기능을 갖추고 있다.
길에 표시된 마크를 따라서 주어진 영역 내를 이동해 나가기 위해서 이를 검지하는 센서가 밑면에 부착되어 있으며, 어느정도 그지역의 지도 정보도 가지고 있어 교차점 확인 등에 이를 이용할 수도 있다. 그리고 장애물감지 등에는 여러개의 초음파 센서를 이용하여 이를 정보화하여 맹인과 교신할수 있게 되어있다.
우리 생활주변에서 효율적으로 활용할 수 있는 지능로봇을 하나더 소개한다면 주어진 영역을 자율적으로 청소하는 청소로봇을 들 수 있다. 이 로봇은 마이크로컴퓨터의 명령에 따라 센서로 작업환경을 감지하여 밑면에 있는 차륜으로 이동하면서 브러쉬로 청소작업을 하도록 되어있다. 초당 50cm이상의 주행속도를 가지고 분당 20㎡의 청소능력을 가지고 연속 5시간 이상 작업을 할수 있다. 또한 자율적으로 작업을 행하기 위해서는 미리 작업환경에 관한 내용이 내장된 컴퓨터에 수록되어 있어야 한다.
이 외에도 고층빌딩의 유리창이나 벽면을 자동으로 청소하는 로봇이나 석유탱크의 침전물을 제거하는 로봇 등이 실용화되어 쓰이고 있다.
원자력발전소가 널리 보급됨에 따라 핵연료의 운반, 핵반응부분의 보수등에는 인간의 오염문제가 있어 가까이 갈 수 없으므로 이를 위한 지능로봇이 필요하게 된다. 이 분야의 지능로봇은 이제껏 행하던 기계식 '마스터-슬레이브'의 운반보수와는 달리, 주어진 환경내에서 작업을 행할 수 있는 자율적 기능을 가진 로봇으로 연구되고 있다. 그 외에도 원자로내의 벽면을 이동하면서 청소작업을 하게 되는 지능 벽면이동 로봇도 실용화되고 있다.
로봇언어도 필요
지능로봇의 구성에서 가장 중요한 기능은, 인공지능(AI) 기법 등을 이용하여 외부환경을 인식해가면서 주어진 작업을 자율적으로 수행하는 데에 중추적인 역할을 하는 지적기능 부분이라 할 수 있다.
이러한 지적기능은 다른 기능 등에서의 정보를 토대로 그 내부에 가지고 있는 지식을 중심으로 판단 결정하여 원하는 결과를 내게 된다.
이를 위해서는 인공지능 분야의 하나인 전문가 시스팀(expert system)등의 지원으로 외부환경에 관한 이해는 물론, 경로를 선정하며 경우에 따라서는 그 레벨에서의 의사를 결정하기도 한다. 그리고 더욱 지적수준이 높아지면 주어진 작업과 환경을, 보유하고 있는 지식과 함께 비교 수정해 가면서 고도의 계획을 세우는 자율성까지도 가지게 된다.
즉 이와 같은 일련의 지적기능을 발휘하기 위해서는 주위환경을 각종 센서 등을 통하여 종합적으로 이해할 수 있는 환경모델이 잘 설정되어야 하며, 환경 작업내용과 같은 각종지식의 습득 내지는 이용, 표현이 가능해야 하며, 경우에 따라서는 맨-머신 인터페이스도 잘 이루어져서 자연언어 처리까지도 가능한 로봇 언어도 개발되어야 한다.
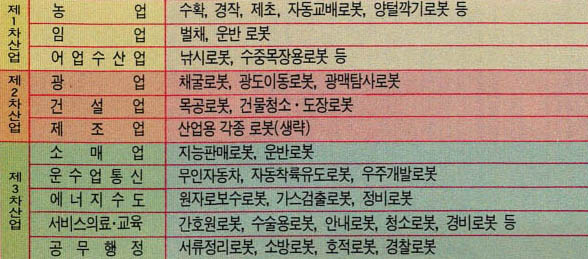
최근에는 여태까지의 산업용 로봇과 같은 단순 기능의 로봇에서 지능을 갖춘 로봇에 관한 연구에 많은 관심을 가지게 되었다. 그러나 아직까지는 각 기능의 연구만이 개별적으로 이루어지고 있는 경우가 대부분이다. 앞으로는 각 기능이 집대성 되어 하나의 작업을 수행할 수 있는 시스팀화 된 지능로봇의 연구가 필요하게 되리라 본다. 이러한 지능로봇이 실제로 산업에 이용될 수 있는 연구분야를 알아보면 (표1)와 같다.
표에서도 알 수 있는 바와 같이 앞으로의 지능로봇은 각 산업의 특성에 맞게 전문화되어 가면서 특수한 작업성을 가지게 된다. 이를 위해서는 로봇이 주어진 작업을 이해할 수 있는 전문적인 지식 베이스를 갖출 수 있게끔 설계되어야 하며, 이를 위해서는 전술한 바와 같은 각 기능, 특히 지적기능에 관한 연구도 많이 필요하게 되리라 본다.
이러한 지능로봇의 개발은 산업분야 곳곳에 응용될 뿐 아니라, 우리의 생활과도 밀접하게 연결이 되어, 머지 않은 장래에는 가정생활까지도 도와줄 수 있는 각종 서비스 로봇 등도 개발되리라 본다. 그 때에는 자연언어를 통하여 인간과 닮은 지능로봇과 대화를 할 수도 있으며, 이로 인해 심리적 만족까지도 인간에게 줄 수 있어서, 인간과 로봇의 공존상태도 어느정도 가능하리라 본다.
그러나 두뇌부를 비롯 로봇 몸체 전체가 고밀도의 전자회로로 구성되고 이를 제어하는 제어프로그램이 상상을 초월할 정도로 복잡해짐에 따라 로봇의 오작동에 의한 피해도 고려해야 한다. 특히 로봇 자체의 결함보다는 주변 전자기계에서 발생하는 전자파가 로봇의 오동작을 일으키는 사고가 발생해 인간에까지 해를 미치는 '로봇살인'도 간혹 일어나고 있는 실정. 인간의 피해를 줄이기 위해 설치한 원자력 발전소의 로봇이 오동작을 일으킨다고 할때는 그 피해의 폭은 상상하기 어렵다.
로봇은 살인에 대한 죄의식도 갖추고 있지 않다. 또한 방사성물질에 대한 경각심도 없다. 로봇이 아무리 지능화한다 해도 돌발사고시 인간이 행할 수 있는 윤리적 판단력을 갖추기는 어려우므로 이에 대한 대비책도 강구해야될 것이다. 그렇지 않는다면 인간의 사소한 실수로 얻는 피해보다는 엄청난 재해를 방지하기 어려울 것이다.