지금까지 드론은 프로펠러를 회전해 공기를 밀어내거나 활주로를 따라 달리면서 속도를 높여 하늘을 날아갈 힘을 얻어야 했어요. 날아오를 때까지 많은 에너지나 시간이 필요했죠. 2024년 12월 4일 스위스 로잔연방공과대학교 지능형시스템연구실 신원동 연구원팀은 이 두 가지 방법을 사용할 때보다 더 쉽게 날 수 있는 로봇 새를 공개했어요.
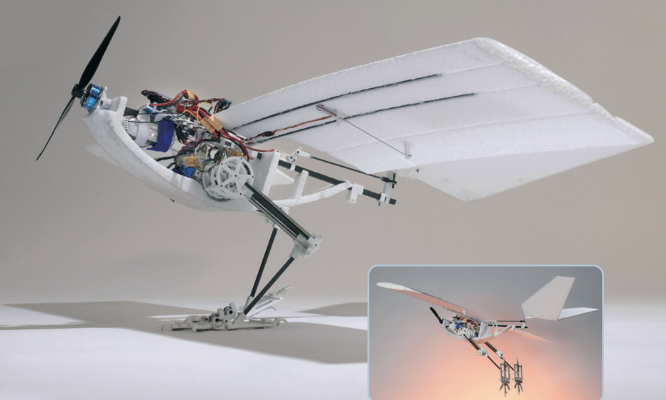
연구팀은 까마귀가 다리를 이용해 뛰어오르는 모습을 보고 영감을 받아 로봇 새를 만들었어요. 프로펠러를 회전시키거나 활주로를 달리지 않고 까마귀처럼 뛰어올라서 하늘을 날 수 있게 한 거죠. 연구팀은 까마귀의 발목과 발가락, 날개 등을 모방해 로봇을 만들고 무게도 까마귀와 비슷하게 약 600g 정도로 가볍게 만들었어요.
연구팀은 로봇 새 날개 아래에 로봇이 움직이게 도와주는 액추에이터를 끼워넣었어요. 로봇 새는 액추에이터를 새의 발목처럼 구부렸다가 펴 걸어 다녀요. 액추에이터 사이에는 스프링이 있는데, 액추에이터를 구부리면 스프링이 휘어지면서 원래 모양으로 돌아가려는 힘인 탄성력이 생겨요. 로봇 새는 탄성력으로 땅을 밀어내면서 높이 뛰어오를 수 있어요. 뛴 뒤에는 프로펠러가 회전하면서 높이를 유지해요.
작동해 봤더니 로봇 새는 일반 새와 비슷하게 1초에 2.4m 속도로 뛰어 올랐어요. 연구팀은 로봇 새가 점프해서 날 때와 프로펠러만 이용해 날 때를 비교해 봤어요. 로봇 새는 프로펠러를 회전해 날 때보다 점프만으로 도약할 때 더 오랜 시간 날 수 있는 에너지가 남아 있었어요. 더 적은 에너지로 날 수 있다는 의미죠. 연구팀은 “걷는 기능도 있는 무인 항공기를 만드는 데 이 기술을 활용할 수 있다”고 밝혔습니다.