로봇 청소기를 본 적 있나요? 혼자서 집안을 돌아다니며 먼지를 빨아들이고, 벽을 만나면 방향을 틀어 움직이지요. 또 배터리가 닳으면 스스로 충전 장소를 찾아가기도 하고요. 로봇 청소기에 사람처럼 눈이 달린 것도 아닌데 어떻게 이런 일이 가능할까요?
로봇 청소기의 비결은 ‘적외선’이에요. 로봇 청소기는 주변으로 적외선을 쏘아 진행 방향에 놓인 장애물의 거리와 크기 등을 가늠해요. 앞에 장애물이 있으면 적외선이 장애물에 부딪혀 반사되는데, 로봇 청소기는 이때 되돌아오는 적외선의 세기를 감지하거나 적외선이 되돌아오는 데 걸린 시간을 계산해 장애물과의 거리를 가늠할 수 있지요. 한편 바닥 방향으로 적외선을 쏘아 반사되지 않으면 낭떠러지가 있다고 판단해 방향을 바꾸기도 한답니다.
때로 로봇 청소기는 자신이 돌아다니는 공간을 지도 정보로 저장하기도 해요. 로봇 청소기 위에 달린 카메라로 집안 곳곳을 촬영하거나, 레이저를 쏘아 거리를 측정하는 라이다(LIDAR)로 공간의 모양을 파악해 데이터로 저장하는 거예요. 그뒤 로봇 청소기는 이 데이터를 바탕으로 장애물을 피하면서 가장 효율적인 경로로 움직이는 방법을 찾아내지요.

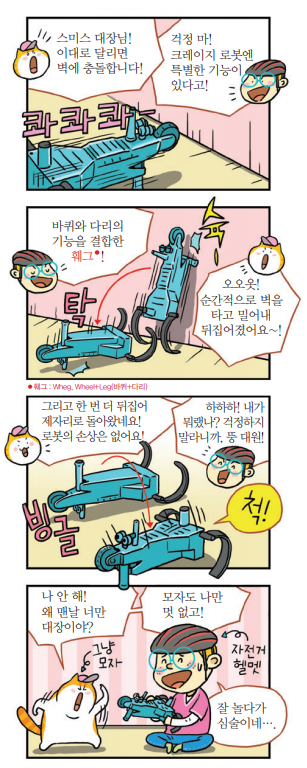
‘크레이지 로봇’의 전략은 ‘훼그’
크레이지 로봇은 장애물을 피하기보단 이를 딛고 방향을 트는 전략을 취해요. 크레이지 로봇이 이동할 때 쓰이는 ‘훼그(Wheg)’ 덕분이지요. 훼그는 ‘바퀴’를 뜻하는 영어 단어 ‘휠(Wheel)’과 ‘다리’를 뜻하는 영어 단어 ‘레그(Leg)’를 합친 단어예요. 바퀴와 다리의 중간 형태인 장치가 로봇이 걸어갈 수 있도록 해 이런 이름이 붙었답니다.

크레이지 로봇 이전에도 다양한 로봇에 ‘훼그’가 쓰였어요. 대표적인 예가 2019년 6월, 미국 카네기멜론대학교 연구팀이 개발한 로봇 ‘티렉스(T-Rhex)’예요. 티렉스는 왼쪽과 오른쪽에 훼그를 각각 3개씩 갖추고 있어요. 티렉스가 걸어가는 동안 훼그는 교차로 돌아가며 땅을 디디지요. 이처럼 훼그를 갖추고 있으면 바퀴만 달린 로봇은 가지 못하는 계단을 오를 수 있어요. 또 훼그가 바닥에 닿을 때 생기는 마찰력을 높이면 경사면도 오를 수 있답니다.
한편 크레이지 로봇은 장애물을 피할 때 훼그의 장점을 적극적으로 활용해요. 벽을 만나면 훼그로 벽을 디디고, 방향을 틀어 몸을 뒤집어요. 그뒤 다시 훼그를 한 바퀴 돌리고 몸을 한 번 더 뒤집어 제자리로 돌아온답니다.
장애물을 만나도 끄떡없는 크레이지 로봇의 모습이 궁금한 친구들은 직접 만들어 보세요!