로봇이 물렁한 토마토를 터뜨리지 않고 집으려면 무엇이 필요할까요? 바로 ‘촉감’이에요. 토마토의 질감을 민감하게 느껴야 토마토가 손에서 미끄러지거나 터지지 않을 정도의 정교한 힘을 줄 수 있거든요. 이처럼 로봇에겐 촉감을 느낄 수 있는 인공 피부가 필요하답니다.
지금까지 개발된 인공 피부들은 구부리거나 늘이는 등의 변형에 약하다는 단점을 갖고 있었어요. 촉감 센서에 사용되는 재료인 ‘실리콘(Si)’이 대부분 변형에 약하기 때문이지요. 그런데 최근 미국 스탠퍼드대학교의 제난 바오교수팀은 실리콘 재료를 변형에 강한 ‘폴리머’ 재료로 바꿔서 인공 피부를 만드는 데 성공했답니다.
연구팀은 1cm2의 인공 피부 안에 무려 347개의 촉감 센서가 빼곡하게 들어있는 인공 피부를 만들었어요. 이 인공 피부는 1000번 이상 잡아당겨도, 길이를 2배로 늘려도 문제없이 작동을 했답니다.
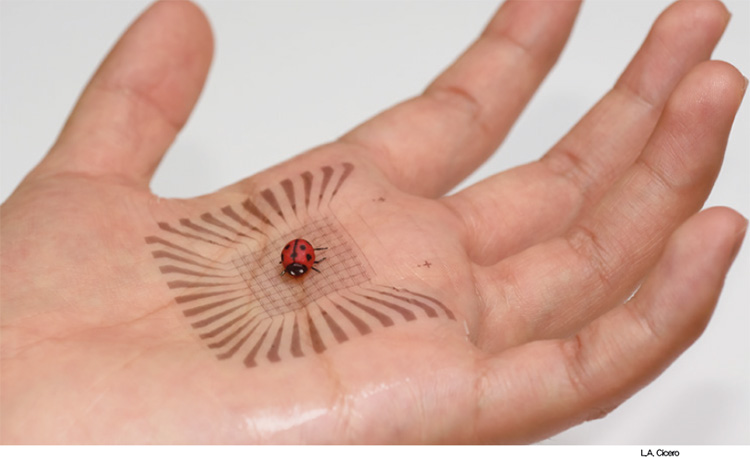
이후 제난 바오 교수팀은 인공 피부의 크기를 10배로 늘린 뒤, 직접 손바닥에 붙이고 성능을 시험해 봤어요. 그 결과, 촉감 센서는 울퉁불퉁한 손 위에서도 문제없이 작동했고, 손을 구부려도 고장이 나지 않았답니다. 또한 크기가 약 1cm인 무당벌레의 여섯 다리를 각각 느낄 정도로 민감했지요.
제난 바오 교수는 “인공 피부는 로봇 외에도 의료 기기 등에 적용이 가능하다”며, “폴리머를 활용해 새로운 형태의 전자제품을 만들어 나갈 것”이라고 앞으로의 계획을 밝혔어요.