하반신 마비를 겪는 사람들은 스스로 걷기 어려워 휠체어에 의존하는 경우가 많다. 그런데 기술의 발전은 이러한 한계를 극복할 가능성을 열어준다. 그중 하나가 2024년 사이배슬론 대회에서 우승한 웨어러블 로봇 ‘워크온슈트F1’이다. 이 로봇은 하반신 완전마비 장애인도 걸을 수 있게 돕는다. 워크온슈트F1을 보기 위해 12월 2일 엔젤로보틱스 대전플래닛을 방문했다.
편집자 주
“제가 한번 일어나는 걸 직접 보여드릴게요.”
김승환 KAIST 연구원이 웨어러블 로봇 ‘워크온슈트F1’을 착용하는 모습을 보여줬다. 크러치(목발)에 달린 버튼을 누르자 로봇이 휠체어에 앉아 있는 김 연구원의 몸에 맞게 구부러졌다. 연구원이 입고 있던 조끼와 로봇을 버클로 연결하니 착용이 완료됐다. 다시 버튼을 눌렀다. 구부러진 부위가 하나씩 펴지며 그가 마침내 완전히 두 발을 딛고 일어섰다. 그는 바로 이 모습으로 스위스 취리히에서 4년에 한 번씩 열리는 ‘사이보그 올림픽’ 사이배슬론 대회 웨어러블 로봇 종목의 1위를 당당히 차지했다.

사이배슬론에 다시 도전한 이유/h4>
김 연구원은 식품 관련 회사에 다니던 평범한 직장인이었다. 그런데 2017년 불의의 교통사고로 하반신 완전마비가 됐다. 평상시 휠체어로 이동한다. 사고가 난 직후에는 다시 걸을 수 있는 방법에 대해 알아봤다. 하지만 당시엔 상용화된 웨어러블 로봇이 국내에 거의 없는 상황이었다. 고정장치를 착용한 뒤 트레드밀 위를 걷는 재활 로봇이 전부였고, 웨어러블 로봇이 개발됐다는 소식이 들려도 현실에서 접하기 어려웠다.
“어차피 못 걷는데 그렇게 해서 걷는 게 의미가 있느냐는 얘기도 많이 들었어요. 그렇지만 저는 정말 걷고 싶었어요. 웨어러블 로봇 개발이 비교적 활발한 미국이나 스위스에 가야 하나 고민할 정도였죠. 그러던 중 사이배슬론 대회를 발견했고, 한국도 이 대회에 참가한다는 사실을 알게 됐어요.”
2019년 김 연구원은 KAIST 연구팀이 사이배슬론 선수를 모집한다는 공고를 보고 곧바로 지원했다. 최종 7인 후보에 들었지만, 준비 도중 몸에 이상이 생겨 결국 참여하지 못했다. 그런데 2022년 또 한 번의 기회가 찾아왔다. 이번에는 선수로서만이 아니라 연구 개발자로서 함께할 사람을 구한다는 공고였다.
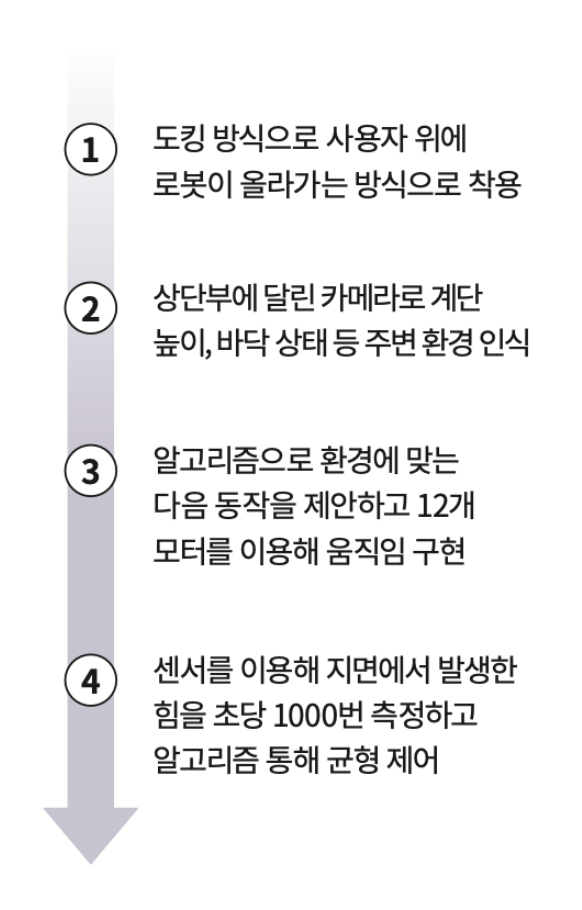
워크온슈트F1 입고 걷는 방법

목표는 우승이 아닌, 자립
팀 카이스트의 팀장인 박정수 KAIST 연구원은 2020년에 이어 2024년, 두 번째로 사이배슬론에 참여했다. 그는 “사이배슬론에 재도전했을 때 가장 먼저 세운 목표는 우승보단 하반신 완전마비 장애인이 독립적으로 일상 생활을 할 수 있게 만드는 것이었다”고 말했다.
“사이배슬론 미션은 일상 생활에서 마주칠 만한 수준인 것들이 많아요. 예를 들어 좁은 의자 사이를 지나가서 앉았다 일어나기 미션은 간격이 좁은 기차나 버스를 탈 때 필요한 동작이죠. 때문에 미션 자체도 중요하지만, 장애인이 진짜 실생활에서 사용하려면 어떤 기능이 필요한지 고민했어요.”
그 결과 웨어러블 로봇이 직접 걸어와 하반신 완전마비 장애인이 다른 사람의 도움 없이 스스로 착용할 수 있는 기술이 개발됐다. 기존의 웨어러블 로봇은 로봇 위에 장애인이 올라타 앉는 형태였다. 따라서 착용하려면 보조자 2명이 장애인을 일으켜 로봇 안에 넣어야 했다. 이 과정에서 하반신 마비로 엉덩이 쪽 감각이 없는 착용자의 신체가 로봇에 긁히는 위험한 상황이 발생하기도 했다.
해당 기술 개발을 주도한 이건희 KAIST 연구원은 “일상에서 하반신 마비 장애인이 독립적으로 사용하려면 로봇을 착용하는 단계부터 혼자 힘으로 할 수 있어야 한다고 생각했다”며 “이를 위해 워크온슈트F1은 로봇이 앞으로 다가와 도킹해서 착용하는 방식으로 만들었다”고 설명했다.
어려워진 미션, 12개 모터로 해결
팀 카이스트(당시 팀 엔젤로보틱스)는 직전 대회인 2020년 사이배슬론 웨어러블 로봇 종목에서도 우승을 차지했다. 당시에 출전시킨 로봇은 ‘워크온슈트4’였다. 그런데 워크온슈트4로 2024년 사이배슬론에 다시 한 번 도전하기는 어려웠다. 2020년에 팀 카이스트가 완벽한 우승을 거둔 탓에 미션 개수가 6개에서 10개로 늘어나고 미션의 난이도도 올라갔기 때문이다. 미션 중에는 아예 목발을 짚지 않고 4m를 걷는 것도 있었다.
그래서 팀 카이스트는 아예 처음부터 다시 로봇 개발을 시작했다. 김 연구원의 몸에 점토나 종이를 붙여가며 기계적 설계를 하고, 이를 잘 구동하기 위한 알고리즘 설계도 새로 했다. 워크온슈트4와 크게 바뀐 점은 모터를 6개에서 12개로 2배나 늘렸다는 것이다. 모터를 늘리면 훨씬 자연스럽고 다양한 동작을 할 수 있어 미션 수행에 유리하다. 이번 대회에 12개 모터를 사용한 건 팀 카이스트밖에 없었다.
하지만 모터가 많아지면서 문제도 생겼다. 윤지민 KAIST 연구원은 “로봇이 크고 무거워져 더 많은 힘이 필요하다보니 어려운 동작을 시도할수록 모터의 구동 온도가 높아졌다”며 “이로 인해 로봇이 고장이 나면 낙상사고로도 이어질 수 있어 온도 상승을 막기 위한 알고리즘을 개발하는 등 안정적으로 모터를 구동하는 방법을 찾았다”고 말했다.
“줄 없이 번지점프하는 기분”으로 뗀 첫 발
김 연구원은 이전까지 로봇 개발과 전혀 상관없는 일을 해왔지만, 특유의 손재주와 많은 사회 경험으로 개발 과정에 큰 도움을 줬다. 게다가 어떤 문제가 잘 풀리지 않으면 자신이 직접 입고 테스트해 보겠다고 나설 정도로 매우 적극적이었다. 하지만 팀원들은 “개발 과정에서 선수가 다치면 안 된다”며 만류했다.
본격적인 착용은 로봇이 완성된 이후에 조심스럽게 이뤄졌다. 개발한 지 거의 2년 만인 2023년 말, 그는 하네스 안전장치를 한 채 로봇을 착용하고 최초로 일어섰다. 팀장인 박 연구원은 “드디어 해냈다는 생각에 안도감이 들었다”고 당시를 회상했다. 그리고 대회를 한 달 앞둔 2024년 9월에는 안전장치를 완전히 제거하고 홀로 섰다. 김 연구원은 “번지점프를 줄 없이 뛰어내리는 기분”이었다고 했다. 극도로 아찔했지만 팀을 믿고, 한 발 한 발 떼기 시작했다. 결국 안전장치를 뗀 첫 날 모든 코스를 완주했다. 이후부터는 개발에 속도가 붙었다. 중간중간 크고 작은 어려움은 있었지만 무사히 팀 카이스트의 대표 선수로 사이배슬론 대회에 참가했다. 그리고 6가지 미션을 6분 41초 만에 완수해 우승 트로피를 손에 쥐었다.

로봇이 휠체어를 대신하는 그날까지
팀 카이스트 연구원들은 대회가 끝난 지금도 계속 바쁘다. 사이배슬론이 끝났다고 워크온슈트F1 개발이 끝난 것은 아니기 때문이다. 계속해서 여러 기능을 추가하고 있다. 더 많은 사람이 다양한 상황에서 사용할 수 있도록 로봇을 업그레이드하기 위해서다.
현재는 경기 모드에서 정해진 움직임을 구현한다면, 앞으로는 사용자의 의도를 파악해 그때그때 센서로 조정하는 방식을 통해 자연스러운 걷기 동작을 해내려고 한다. 그렇게 되면 정형화된 공간이 아닌 야외 환경에서도 워크온슈트F1을 사용할 수 있다. 연구팀의 최종 목표는 로봇을 입고 완전히 목발 없이 걸을 수 있도록 하는 것이다.
“과거엔 시력이 나쁘면 일상 생활이 힘들었지만, 안경이 등장하면서 시력 저하를 더 이상 장애로 여기지 않게 됐잖아요? 훗날에는 걷기 불편한 사람들을 돕는 웨어러블 로봇 덕분에 보행 장애가 더 이상 장애로 여겨지지 않는 날이 온다면 참 좋을 것 같습니다. 그런 세상을 만드는 것이 저희의 목표예요.” 박 연구원은 말했다.
김 연구원은 장애인에 대한 인식 변화의 중요성을 강조했다. “웨어러블 로봇이 연구실 밖에서 활용되려면 사회적으로 해결해야 할 과제가 많습니다. 저도 장애를 경험하고 나서야 휠체어를 탄 사람들의 어려움이 눈에 들어왔는데요. 마찬가지로 장애를 가진 사람들이 로봇을 착용하는 모습이 자연스럽게 받아들여지면 좋겠습니다.”