로봇이 손쉽게 이동하려면 어떤 형태로 다리를 만들어야 할까. 일본 오사카대, 교토대 공동연구팀이 지네의 움직임에서 착안한 지네 로봇, ‘미리아포드’를 발표했다. 이 연구는 5월 24일 국제학술지 ‘소프트 로보틱스'에 실렸다. doi: 10.1089/soro.2022.0177
많은 로봇들이 인간과 비슷한 이족보행 형태로 만들어지지만, 두 발로 걷는 로봇은 한 쪽 다리에만 이상이 생겨도 큰 문제가 된다. 그렇다고 곤충처럼 여러 개의 다리를 만들어 붙이자니, 다리들을 일사불란하게 제어하는 데 고성능 컴퓨터와 큰 전력이 필요하다.
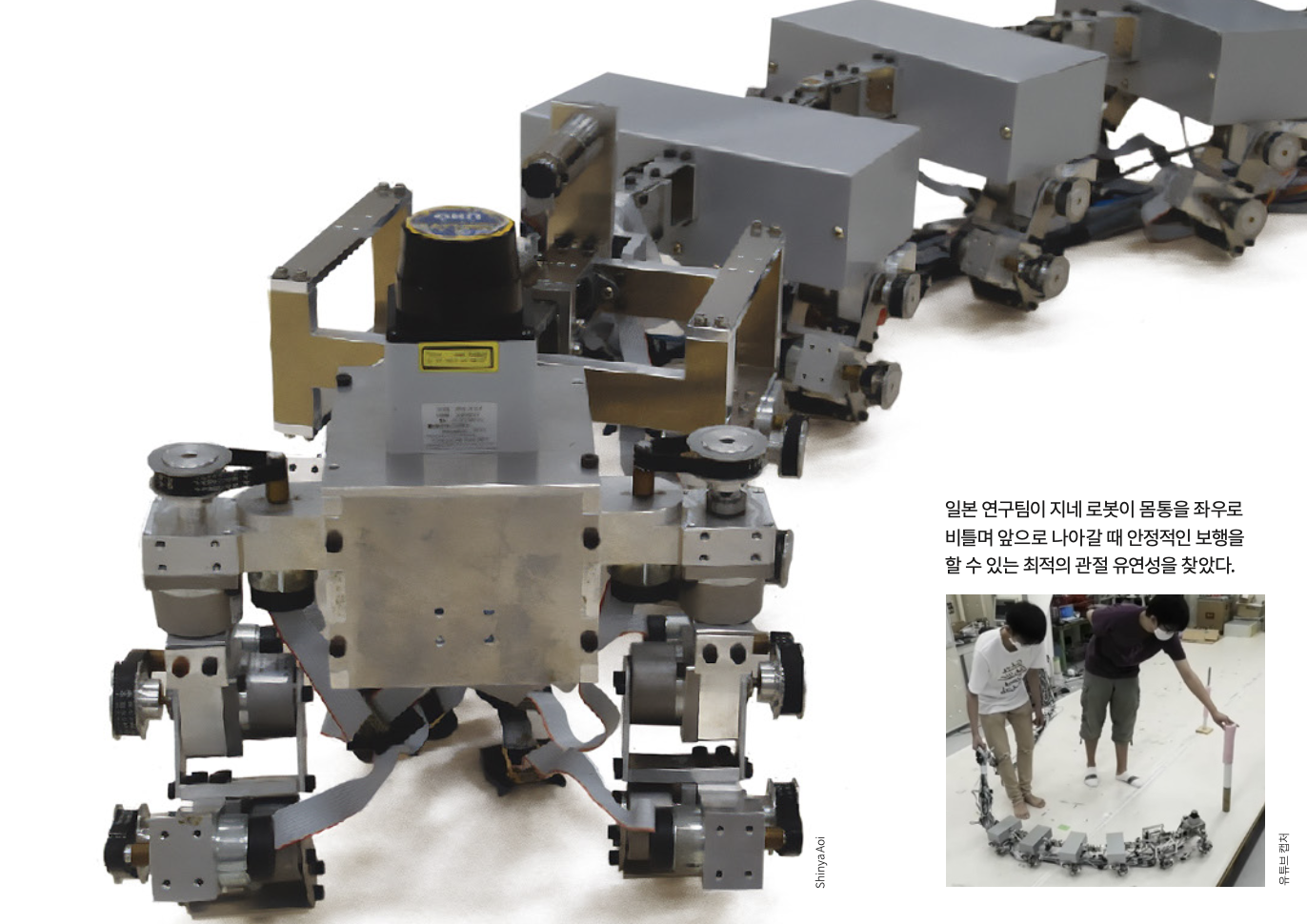
미리아포드의 몸통은 총 6개의 마디와 관절로 구성됐다. 마디 하나에 다리가 두 개씩 달려있어 총 12개의 다리로 움직인다. 미리아포드는 지네처럼 관절을 꺾어 몸통을 좌우로 비틀면서 곡선을 그리듯 앞으로 나아가는 것이 특징이다.
연구팀은 이전부터 꾸준히 지네 로봇을 연구해왔다. 이번에 만든 미리아포드는 안정적으로 직진 보행할 수 있는 최적의 관절 유연성을 찾아냈다는 데 의의가 있다. 몸통을 연결하는 관절이 유연해야 지네 로봇이 곡선을 그리며 움직이는데, 이 유연성이 너무 커지면 움직임이 오히려 불안정해진다는 점을 확인한 것이다. 미리아포드는 관절의 유연성을 효과적으로 통제해 앞서 개발된 지네 로봇보다도 더 안정적이고 효율적으로 움직일 수 있다.
12개의 다리를 가진 지네 로봇은 험한 지형에서 빛을 발할 예정이다. 연구에 참여한 마우 아다치 오사카대 연구원은 “수색이나 구조를 해야하는 위험한 환경뿐만 아니라, 행성 탐사에서도 미리아포드를 사용할 수 있다”고 말했다.