‘로보트 재권V’를 만들려면 가장 먼저 어떤 것부터 시작해야 할까요? 로봇을 만들어본 적이 없는 사람들이 가장 먼저 떠올릴 수 있는 질문입니다. 머리? 몸통? 팔? 다리? 저는 항상 이렇게 답합니다.
“로봇이 움직이는 상황을 머릿속으로 그려보세요.”
로봇을 왜 만들려고 하는지, 로봇을 누가 쓰는지, 로봇을 어떻게 쓸 것인지, 로봇이 어떤 환경에서 쓰이는지 등 로봇자체 보다는 로봇 주변을 먼저 살펴봐야 합니다.
장소, 대상, 움직임…머릿속에 로봇을 그려라
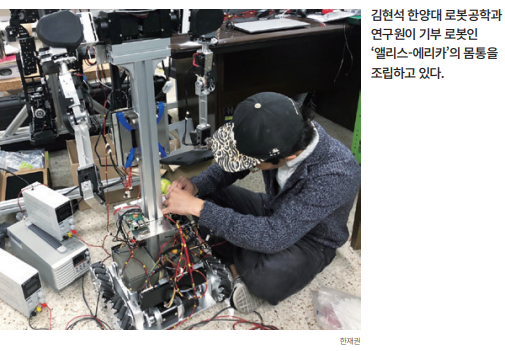
그러면 로보트 재권V를 만들기에 앞서, 최근에 제가 직접 만들었던 로봇 ‘앨리스-에리카(ALICE@ERICA)’를 예로 들어보겠습니다. 우리 학교(한양대)의 건학 정신은 ‘사랑의 실천’입니다. 사랑을 실천하는 방법은 참 많습니다.
그렇다면 기술로 사랑을 실천할 수 있는 방법은 없을까요? 학교에서는 로봇이 구세군처럼 자선 모금을 해 불우 이웃을 도우면 좋겠다는 아이디어가 나왔습니다. 그리고 제게 ‘자선 모금용 기부 로봇’을 만들어 달라는 의뢰가 들어왔지요. 저 또한 좋은 아이디어라고 생각해 기꺼이 만들어보겠노라고 했습니다.
그러자 바로 다음 순간 많은 생각이 꼬리에 꼬리를 물고 떠오르기 시작했습니다. 로봇을 어떤 장소에서 사용할 것인지, 누구를 대상으로 모금하는지, 로봇이 스스로 움직여야하는지 아니면 누군가 조종해야 하는지, 작동 시간은 몇 시간인지…. 로봇이 움직이는 상황을 상상한 것입니다. 결국 많은 논의 끝에 로봇의 활동 내용이 정리됐습니다. 학교 구내식당에서 식사를 마치고 나오는 대학생과 교직원에게 로봇이 다가가 자선 모금을 권유하는 것으로 말입니다.
자, 이제 로봇을 설계할 준비가 됐습니다. 이 로봇은 대학생과 교직원, 즉 어른을 상대해야 합니다. 이들과 눈을 마주치며 소통하기 위해서는 로봇이 사람을 향해 적당히 위를 쳐다보는 각도가 자선 모금을 하기에 좋을 것 같습니다. 그러기 위해서 로봇의 키는 120~140cm가 적당합니다.
또한 로봇이 걸어가는 성인을 따라가려면 성인의 평균 보행 속도인 시속 약 4km로는 걸어야 합니다. 로봇이 이동하면서 사람과 부딪히지 않기 위해서 거리 측정 기능과 장애물 인식 기능도 있어야할 것 같습니다. 스스로 사람을 알아볼 수 있는 판단 기능도 필요하고, 사람들과 의사소통을 빠르게 하기 위해 음성 인식과 말하기 같은 인공지능 기능은 필수겠지요. 거기에 동영상을 보여 줄 수 있는 패드가 있으면 더할 나위 없을 것 같습니다.
결국 앨리스-에리카는 키 130cm에 이동 속도는 4km/h, 거리 인식 가능한 스테레오 카메라와 음성으로 의사소통을 하기 위한 마이크, 스피커, 동영상 재생을 위한 패드가 장착된 로봇으로 구상됐습니다.
두 다리 포기하고 ‘옴니휠’ 달아
다음은 앨리스-에리카를 구체적으로 설계할 차례였습니다. 키 130cm에 시속 약 4km로 움직이는 인간형 로봇을 만드는 것이 기본 사양입니다. 아직까지 세계적으로 이 정도 사양을 수행할 수 있는 로봇은 거의 없습니다. 미국에 하나, 일본에 세 개 정도 있는 것으로 알고 있는데요. 아직 저도 만들지 못했습니다.
그럼 어떻게 해야 할까요? 용감하게 도전해 성공하기에는 확률이 너무 낮아 보입니다. 그렇다고 해보지도 않고 포기하는 것도 옳지 않습니다. 혹시 제가 로봇을 휴머노이드라는, 기술적으로 너무 어렵고 힘든 조건 안에서만 생각하는 것은 아닐까요?

저는 해결하기 어려운 문제를 만날 때마다 ‘현실의 장벽은 아이디어로 극복한다’라는 문구를 항상 떠올립니다. 아이디어는 포기하는 것에서 나오기도 합니다. 그래서 이번에는 휴머노이드의 전통적인 형태에서 벗어나 보기로 했습니다.
그래서 앨리스-에리카의 경우, 다리를 포기했습니다. 두 다리는 험지도 사람처럼 안정적으로 다닐 수 있다는 최대 장점이 있지만, 현재 기술로는 균형을 잡기 어렵다는 단점도 있지요. 두 다리 대신에 바퀴를 달면 130cm의 키에서 시속 약 4km는 낼 수 있을 것 같았습니다.
옆으로 이동하지 못한다는 바퀴의 단점을 극복하기 위해서는 ‘옴니휠(Omni wheel)’이라는 특수 바퀴를 사용하기로 했습니다. 옴니휠은 상하좌우 어떤 방향으로든 굴러갈 수 있습니다. 옴니휠 바퀴를 기반으로 그 위에 휴머노이드 몸체를 만들어 세우는 상상을 했습니다. 키가 130cm이니까 초등학교 3학년 학생을 모델로 머리, 몸통, 팔, 다리의 비례를 잡으면 될 것 같습니다.
외형의 구조를 잡았으면 이제 내부 형상을 만들 차례입니다. 맨 처음에는 로봇을 지탱할 기둥을 세웁니다. 인간의 척추 같은 역할을 하지요. 저는 단단하고 가벼운 알루미늄 합금을 주로 가공해서 쓰는데요. 앨리스-에리카 또한 알루미늄 프로파일을 중앙에 단단하게 세우고 다른 장비를 붙여 나가기 시작했습니다. 이제 짐작이 가시죠? 이와 마찬가지로 로보트 재권V의 제작 첫 단계도 바로 몸통입니다.
3차원 테트리스처럼 전자 부품 넣기
앞으로 제가 과학동아를 통해 11개월 동안 만들 로보트 재권V는 사람처럼 직립 보행을 할 뿐만 아니라 스키를 타거나 축구도 할 수 있는 휴머노이드입니다. 스포츠에 능한 휴머노이드인 셈이죠. 로보트 재권V의 몸통에는 어떤 부품이 들어가야 할까요?
인간은 몸통 안에 생존에 필요한 대부분의 기관이 있습니다. 소화를 위한 소화기관, 호흡을 위한 호흡기관, 혈액 순환을 위한 심장을 비롯해서 각종 호르몬 생성 기관, 몸의 중심을 지탱하는 척추와 중요 기관들을 보호하기 위한 갈비뼈 등 우리 몸을 유지하기 위한 중요한 기관들이 거의 모두 몸통에 들어 있습니다.

그런데 로봇은 음식을 먹지도 않고 산소를 이용해 호흡하지도 않기 때문에 인간에게 필요한 많은 기관들이 필요 없습니다. 그래서 몸통에는 여유 공간이 많이 생깁니다. 이 공간에 로봇에 필요한 많은 장비들을 넣어야 합니다.
로봇은 주로 컴퓨터 같은 전자 장비들을 쓰기 때문에 노트북이나 데스크톱에 들어가는 부품들을 넣습니다. 보통은 컴퓨터 부품들이 많아서 로봇의 몸통은 전자 부품들로 가득 차게 되는데요. 얼마나 효과적으로 잘 배치하느냐에 따라서 좋은 로봇 디자인을 만들어 낼 수 있습니다.
로보트 재권V는 음성인식과 사람을 구분하기 위한 영상인식 등 높은 수준의 인공지능을 갖춰야 합니다. 그래서 앨리스-에리카처럼 그래픽연산장치(GPU)의 성능이 좋은 컴퓨터를 넣어봅니다. 크기도 상당히 크고 필요한 부가 장비도 많습니다.
그래서 몸통 안에 이 모든 전자 부품을 넣는 과정은 마치 레벨이 높은 3차원 테트리스 게임을 하는 것 같습니다. 만약에 이러한 배치 작업이 재미있고 재능을 보이는 사람이라면 로봇 설계자가 될 자질이 있는 것입니다.
로봇 몸통에 전자 부품들을 배치할 때 인간의 몸과 비슷하게 위치하는 것이 좋습니다. 사람들과 의사소통하려면 아무래도 사람과 비슷하게 보이는 것이 좋기 때문입니다. 예를 들어 카메라 같은 장비는 눈의 위치에 배치하는 게 좋겠지요. 스피커는 가슴에서 입 사이에 배치해야 소리가 나오는 것이 자연스럽게 보일 것 같습니다. 안테나 같은 부품은 사람에게 없는 기능이기 때문에 상상력을 발휘해서 배치해야 합니다.
이렇게 공간을 고려하면서 수많은 전자 부품을 몸통 안에 배치하고 나면 이 부품들을 잘 보호할 수 있도록 몸통 프레임을 설계해야 합니다. 프레임은 역할에 따라 때로는 부드러워야 하고 때로는 강해야 합니다.
로봇을 만들어 가기 위해서는 참 많은 과정을 거쳐야 합니다. ‘천릿길도 한걸음부터’라는 말처럼 아무리 길고 복잡한 과정이라도 하나하나 익혀 나가면 언젠가는 여러분도 로봇을 만들 수 있게 될 것이라고 믿습니다. 다음 호에는 로보트 재권V의 몸통에 팔을 붙여 보겠습니다. To be Continued.