# ‘쿠쿠쿵’ 지진으로 5층 아파트가 주저앉았다. 무너진 잔해에서 재빨리 생존자를 찾아야 하는 상황. 무선 조종 로봇을 급히 투입했지만 좁은 틈과 높은 장애물에 가로막혔다. 첨단 휴머노이드 로봇도 출동하자마자 무거운 건물 잔해에 깔려버렸다.
실제 재난 현장을 가정하면 제아무리 첨단 로봇이라도 할 수 있는 일이 많지 않다.
화려하지는 않지만 실용성으로 무장한 재난구조로봇 3인방을 소개한다.
장애물이 뭐죠? 나는 뱀 로봇
좁은 공간을 비집고 들어가 생존자를 확인하는 임무에 최적화된 로봇은 뱀 모양이다. 실제로 그동안 다양한 뱀 형태의 로봇이 개발됐다. 독일 ‘에마미 디자인 스튜디오’가 2014년 애벌레를 본 따 만든 ‘로보웜(Robo Worm)’과 미국 스탠퍼드대 연구진이 7월 공개한 ‘덩굴로봇’ 등이 대표적이다.
하지만 이런 수색로봇은 결국 재난 현장을 기어 다니는 방식이어서 한계에 부딪혔다. 타도코로 사토시 일본 도호쿠대 정보과학과 교수팀은 “과거 건설사고 현장이나 후쿠시마 제1원전 붕괴 현장에 뱀 형태의 로봇을 투입했지만, 장애물이나 넓게 패인 틈에 막혀 제약이 많았다”며 “공기를 주입해 장애물을 뛰어 넘을 수 있는 수색로봇을 개발했다”고 6월 12일 밝혔다. 로봇의 정식 명칭은 ‘공기 부상형 능동 스코프 카메라’로, 공기를 이용해 몸을 일으키는 뱀 로봇이다. 이런 형태의 뱀 로봇은 세계 최초다.
새로 개발된 뱀 로봇은 지름이 50mm, 무게가 3kg, 길이가 8m다. 전신은 여러 개의 모터로 이뤄져 있고, 꼬리 부분에는 긴 호스가 연결돼 있다. 평면을 이동할 땐 진동 모터의 미세한 진동으로 추진력을 얻는다. 여기까지는 다른 뱀 형태 로봇과 별반 다르지 않다.

그런데 장애물을 만나면 달라진다. 로봇의 머리 부분에 달려 있는 노즐에서 공기를 분사해 머리를 번쩍 든다. 공기를 수직 아래쪽과 앞뒤로 분사하며 고개를 흔드는 모습은 피리 소리에 반응하는 코브라의 모습과 유사하다. 공기는 꼬리에 연결된 호스로 공급받는다.
공기를 분사하는 힘은 약 2N(뉴턴)으로 약 20cm 높이의 장애물을 넘을 수 있다. 여기에 로봇의 길이를 늘이고 노즐의 분사력을 높이면 벽도 기어오를 수 있다는 게 연구팀의 설명이다. 타도코로 교수는 과학동아와 e메일 인터뷰를 통해 “무너진 건물의 잔해 크기에 따라 필요한 뱀 로봇의 길이를 자유롭게 바꿀 수 있다”고 설명했다.
새로 개발된 로봇은 방향 전환도 빠르다. 같은 길이의 뱀 로봇이 방향을 바꾸는 데 26초가 걸리는 반면, 이번에 개발된 로봇은 1.6초 만에 U턴을 한다. 연구팀은 또 머리 쪽에 카메라를 달아 잔해 더미 속에서 시야를 더 넓게 촬영할 수 있도록 만들었다. 생존자를 더 빨리 찾을 수 있는 셈이다.
타도코로 교수는 “재난구조로봇을 개발할 때 가장 중요한 요소는 실용성”이라며 “이번에 개발한 뱀 로봇의 내구성을 보완하는 대로 곧바로 실용화할 것”이라고 밝혔다. 이 로봇은 일본 문부과학성 산하 과학기술진흥기구(JST)의 ‘혁신적인 연구 개발 추진 프로그램(ImPACT)’ 중 하나로 개발됐다. 개발 기간은 2014년부터 총 4년이 걸렸으며, 내년에 최종 완료된다.

양 팔 달린 ‘만능’ 굴삭기 로봇
재난 현장에서 구조 로봇의 역할은 매우 다양하다. 잔해 더미와 같은 장애물을 제거하는 터프한 일부터 생존자를 구조하는 섬세한 작업까지 다재다능해야 한다. 로봇 한 대로 해결하기 쉽지 않다.
그런데 최근 이런 작업을 전부 소화할 수 있는 ‘만능 로봇’이 등장했다. 히로시 요시나다 일본 오사카대 공학대학원 특임교수팀이 개발한 ‘두 팔 달린 굴삭기 로봇’이 그 주인공이다. 로봇은 ImPACT 중 하나로 6월 19일 공개됐다.
굴삭기는 붕괴된 건물의 잔해를 제거하기 위해 없어서는 안 될 장비다. 그러나 가파른 경사면에 접근할 수 없고, 정교한 조종이 어려워 2차 붕괴를 유발하는 등 한계도 많다. 연구팀은 굴삭기에 360도 회전하는 팔을 하나 더 붙여 문제를 해결했다. 벽이나 땅을 뚫을 때(드릴 모드), 큰 돌을 주워 나를 때(파지 모드) 등 상황에 맞춰 양손 모양을 바꿔가며 두 손이 협력하게 한 것이다. 돌보다 무른 사물, 복잡하게 생긴 물건을 옮길 때는 손가락이 4개 달린 로봇 손으로 바뀐다.
히로시 교수는 과학동아와의 e메일 인터뷰에서 “새로 개발한 로봇 손은 차량의 문을 열 수 있을 정도로 정밀한 작업이 가능하다”며 “사람이 양손으로 나이프와 포크를 사용하는 것처럼, 팔 하나가 로봇의 작업 유연성(flexibility)을 드라마틱하게 증가시킨다”고 밝혔다. 두 팔은 경사면이나 계단에서도 도움이 된다. 한 팔을 지팡이로 삼아 몸체를 밀거나 들어 올릴 수 있다.
먼 미래에는 이런 기능도 결국 휴머노이드가 대체할 수 있지 않을까. 거대 인간형 로봇이 현장에 투입될 시기를 묻자 히로시 교수는 “웬만한 휴머노이드는 평탄하지 않은 지형엔 아예 접근할 수 없고, 들어 올릴 수 있는 무게도 적다”며 “재난 현장에서는 중장비 기반의 재난 대응 로봇이 필수적”이라고 말했다.
두 팔 달린 굴삭기 로봇은 내년에 개발이 최종 완료된다. 연구팀은 마지막 단계로 로봇을 100m 이상 떨어진 지점에서 원격으로 조종하는 기술을 구현 중이다.
상부에 드론 등을 연결해 현장 상황을 정확하게 파악하고, 고화질로 전송하는 방법을 고려하고 있다.
200Sv 수조에서 헤엄치는 ‘리틀 선피시’
2011년 동일본 대지진으로 붕괴된 후쿠시마 제1원전의 훼손 정도가 예상했던 것보다 심각한 것으로 드러났다. 7월 20일 일본 공영방송 NHK에 공개된 수중 영상을 보면 3호기의 원자로 아래에 있던 1차 격납용기(PCV) 구조물이 완전히 사라져 있다. 원자로에서 흘러나온 핵연료가 뒤섞이면서 오염수 아래로 가라앉은 것이다.
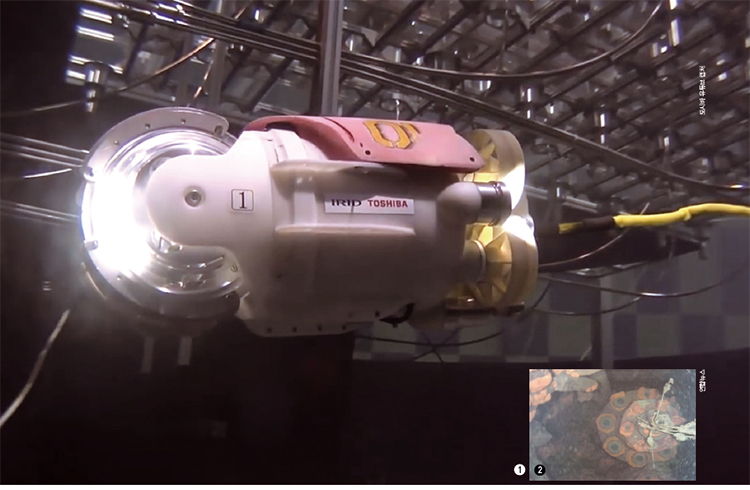
이 영상은 일본의 원자력 및 전자회사인 도시바와 국제원전해체연구소(IRID)가 제작한 원격 제어 잠수정 ‘리틀 선피시(개복치)’가 촬영했다. 격납용기 내부의 모습이 공개된 것은 사고 이후 6년 만이다. 과거에도 원격으로 조종할 수 있는 로봇이 여럿 개발됐지만 방사능 수치가 너무 높아 고장을 일으켰다.
고로 야나세 도시바 원자력시스템 및 서비스사업부 총 책임자는 “오염수가 범람할 수도 있는 특수 지역에 로봇을 보내는 일이 가장 큰 과제”라며 “고준위 방사선을 차폐하는 소형 로봇을 만드는 데 성공했다”고 6월 15일 보도자료를 통해 밝혔다. 로봇이 견딜 수 있는 방사선량은 200Sv(시버트) 수준이다. 인간이 피폭되면 즉사하는 수치다.
리틀 선피시는 지름 13cm, 길이 30cm로 아담한 크기다. 격납용기에 접근할 수 있는 구멍의 지름이 14cm여서 이 구멍을 통과할 수 있도록 작게 설계했다. 연구팀은 로봇 앞뒤에 비디오카메라와 발광다이오드(LED) 조명을 달았다. 또 깊이가 6m나 되는 격납용기 속에서 연료의 잔해를 잘 찾아내기 위해 프로펠러 장치를 로봇 뒤쪽에 4개, 앞쪽에 1개를 달았다.
리틀 선피시는 앞으로 격납용기 속을 헤엄치면서 내부에 녹아내린 핵연료의 위치를 파악하는 임무를 수행할 예정이다. 특히 일반 로봇이 접근하기 어려운 사각지대인, 격납용기 바닥 정 중앙을 샅샅이 살필 계획이다.