KAIST 휴머노이드로봇연구센터(이하 휴보센터)에 가면 높이 2m 정도의, 네모난 모양의 커다란 회색 기계를 볼 수 있습니다. 위쪽에는 여러 가지 모양의 전동드릴이 붙어 있고, 아래쪽에는 두툼한 금속판을 고정할 수 있는 작업대가 달려 있습니다. 스위치를 넣으면 미리 입력해 놓은 수치대로 금속판을 깎아 주지요. 이렇게 만든 부품을 연결해 로봇 휴보의 뼈대로 씁니다. 유리창이 붙어 있어서 작업과 정을 들여다봤는데, 중간 중간에 물도 뿌려가며 윙~윙~소리를 내면서 자동으로 부품을 척척 깎아내더군요. 미국, 싱가폴 등 해외 로봇과학자들이 휴보를 10여 대나 사 가겠다고 하는 바람에 이 기계로 부품을 깎는 직원도 요즘 부쩍 바빠진 것 같았습니다.
휴보센터는 원래 KAIST 기계공학과 기계제어연구실(MC Lab)에서 출발했습니다. 말 그대로 ‘기계를 제어하는 기술’을 연구하는 게 목적이라서 새로운 물질을 합성하거나, 모터 같은 정밀 기계장치를 직접 개발하지는 않습니다. 당연히 여러 가지 잡다한 부품도 직접 만들지 않습니다. 세상에 나와 있는 부품 중에 규격에 맞는 것을 골라 쓰면 되니까요.
하지만 이런 휴보센터도 결국은 수억 원을 넘는 돈을 주고 결국 부품 깎는 기계를 구입했습니다. 로봇의 골격을 직접 만들어 쓰기 위한 겁니다. 로봇의 골격은 움직일 때 몸을 지탱해 주고, 배터리, 전기를 나누어 주는 배전기, 컴퓨터, 전기모터와 각종센서 등을 붙일 수 있는 로봇의 기본적인 뼈대를 말합니다.
 [휴보센터에 설치돼 있는 ‘고정도 수직 수평형 머시닝센터 VX400’.전담 관리 직원을 따로 둘 정도로 애지중지하는 장치다. 입력된 수치대로 다양한 공구를 이용해 금속을 깎아 부품을 만든다. 휴보2, 실험용 다리 로봇 KHR플레이너 등 여러 종류의 로봇 골격 부품을 모두 이 기계로 깎았다.]
[휴보센터에 설치돼 있는 ‘고정도 수직 수평형 머시닝센터 VX400’.전담 관리 직원을 따로 둘 정도로 애지중지하는 장치다. 입력된 수치대로 다양한 공구를 이용해 금속을 깎아 부품을 만든다. 휴보2, 실험용 다리 로봇 KHR플레이너 등 여러 종류의 로봇 골격 부품을 모두 이 기계로 깎았다.]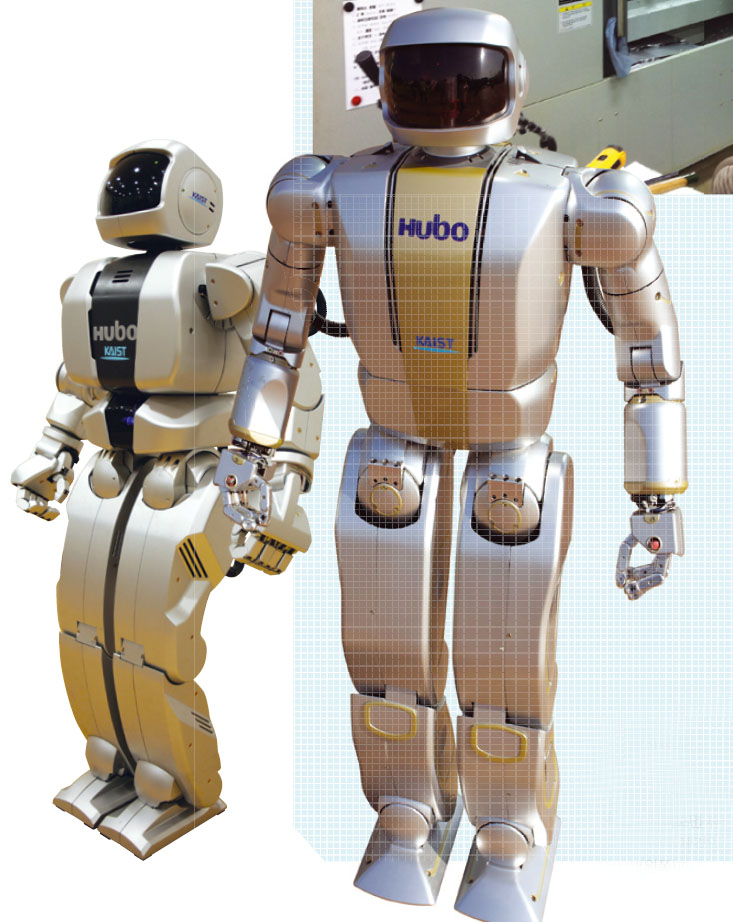
[휴보1(왼쪽)과 휴보2의 모습. 자세히 살펴보면 휴보2가 한결 날씬한 체격인 것을 확인할 수 있다.]
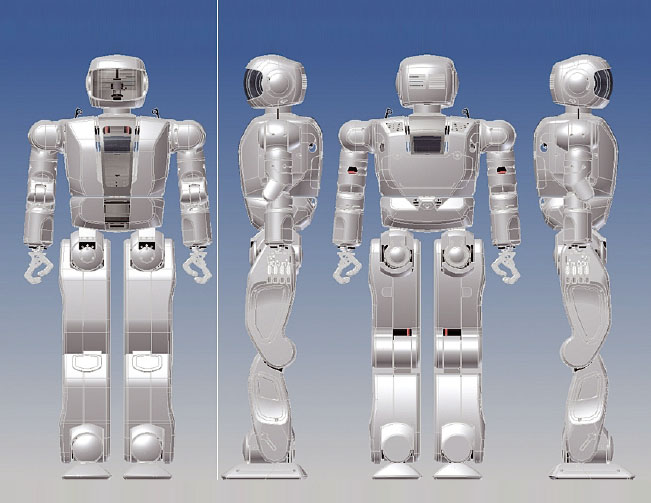
[휴보2의 3차원 설계도. 휴보2의 무게는 불과 37kg(배터리는 제외).]
휴보1을 만들 때만 해도 휴보 연구팀은 이 기계를 가지고 있지 않았습니다. 그러니 가공업체에 설계도를 보내준 다음 부품이 도착할 때까지 기다리곤 했습니다. 그리고 원하는 만큼 성능이 나오지 않으면 설계를 고치고, 다시 부품을 주문합니다. 그 동안에는 두 손 놓고 기다리는 수밖에 없습니다. 이런 일이 계속되면 사소한 문제는 골격의 설계를 새롭게 고치기보다는 모터의 힘을 늘려주는 등 뭔가 다른 해결책을 찾아볼 확률이 높습니다. 절대로 좋은 방법은 아니지요. 저는 휴보센터가 부품 깎는 기계를 산 걸 보고 ‘백 번 잘했다’고까지 평가했습니다.
로봇에게 골격이 중요한 이유
자동차 마니아들은 복잡한 튜닝과정을 거쳐 자동차의 성능을 더 높이려고 합니다. 엔진이나 변속기, 타이어 같은 부품을 더 좋은 것으로 바꿔주는 것인데, 튜닝을 계속할수록 분명히 차는 더 빨라지고, 운전하기도 편해질 것입니다. 하지만 아무리 개조를 거듭해도 차의 기본적인 성격은 바꿀 수 없습니다. 바퀴의 간격, 차체의 무게중심 같은 것은 골격(프레임) 자체를 바꾸지 않는 한 변하지 않으니까요. 결국 기본 구조가 뛰어나지 못하면 아무리 좋은 엔진이나 변속기, 첨단 안전장치를 달아 주어도 명품 차가 되기는 어렵습니다.
이런 골격의 중요성은 로봇도 마찬가지입니다. 실제로 휴보도 부품 깎는 기계를 들여오고 나서부터 한층 더 가벼워지고 튼튼해졌습니다. 휴보2는 휴보센터에서 직접 뼈대부품을 만들어가면서 개발한 로봇입니다. 휴보1(55kg)에 비해 몸무게가 10kg이나 더 가벼워졌는데도 훨씬 튼튼하고 훨씬 더 잘 걷습니다. 휴보 아빠인 오준호 교수는 “휴보2가 두 발로 달릴 수 있게 되고, 걸음걸이도 한결 더 늠름해진 원인은 여러 가지가 있지만 월등히 좋아진 골격구조 역할이 가장 크다”고 말했을 정도니까요.
그렇다면 ‘로봇의 좋은 골격’이란 어떤 것일까요. 사람이나 동물의 뼈를 생각해 보면 알 수 있습니다. 뼈가 하는 일은 크게 세 가지입니다. 첫째로 신체를 지지하고 중요한 내장기관을 보호해 주는 ‘기둥’ 역할을 합니다. 두 번째로는 근육과 연결돼, 근육이 내는 힘을 받아들여 몸을 움직이게해 주는 ‘지렛대’ 역할도 맡고 있습니다. 세 번째로는 뼈 속, 즉 골수에서 혈액을 만듭니다. 로봇의 뼈가 혈액을 만들 필요는 없습니다만, 다른 두 가지 기능은 당연히 똑같습니다. 적은 힘으로도 잘 움직여야 하니 무게 중심이 잘 맞아야 하고 가벼워야 합니다. 그런데 충격에 잘 견디고 빠르게 움직이려면 반대로 묵직하고 튼튼할 필요도 있습니다. ‘가볍지만 튼튼해야 한다’는 기계 설계의 최대 숙제는 로봇에도 그대로 적용됩니다.
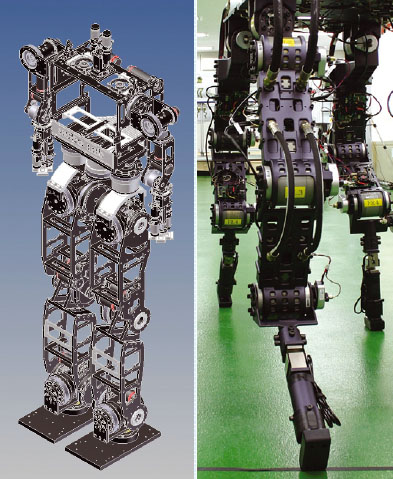
[한국과학기술연구원(KIST)이 개발한 마루Z의 다리. 기본 구조가 휴보와 닮은 점이 많다. 재료도 알루미늄합금으로 만든 데다 같은 ‘갑각류 형’이기 때문이다.]
새우 닮은 두발로봇, 사람 닮은 네발로봇
그렇다면 로봇의 골격구조는 어떤 것들이 있고, 어떻게 만들까요. 로봇의 골격 구조는 크게 두 종류로 나눕니다. 사람처럼 뼈의 바깥을 근육이 감싸고 있는 ‘포유류 형’과 새우나 게처럼 뼈대가 몸을 감싸고 있는 ‘갑각류 형’이 그것입니다. 과학동아 3월호를 통해 로봇의 근육인 액추에이터를 소개해 드렸습니다만, 실제로 로봇의 골격 구조는 어떤 종류의 근육을 쓰는지에 따라 달라집니다.
유압식 액추에이터를 사용하는 경우에는 강철처럼 튼튼한 막대 같은 것을 가운데 세워두고 앞, 뒤로 액추에이터를 붙여 줍니다. 액추에이터는 피스톤 작용을 하면서 전체적인 크기가 늘거나 줄어들기 때문에 거기에 따라서 뼈대가 움직입니다. 결국 뼈의 앞뒤로 근육이 붙어 있는 사람의 팔다리와 비슷한 구조입니다.
전기모터는 주로 갑각류 형 로봇에 많이 쓰입니다. 이런 갑각류 형 구조를 가진 로봇에 굳이 한자어로 이름을 붙여 보자면 ‘외골격 로봇’이라고 하면 좋겠습니다만, 그 이름을 쓸 수는 없습니다. 실제로 외골격 로봇이란 군인이나 공장에서 일하는 작업자들의 힘을 세게 만들어 주는 ‘입는 로봇’이라는 뜻으로 이미 쓰고 있기 때문입니다. 처음 입는 로봇을 만들던 미국의 로봇과학자들이 입는 로봇을 ‘외골격(exoskeleton) 로봇’이라고 부른 다음 고유명사처럼 굳어진 경웁니다. 따라서 편의상 저는 갑각류 형이라고 부르는게 좋지 않나 생각하고 있습니다.
전기모터를 쓰는 로봇은 대부분 갑각류 형으로 만듭니다. 전기모터를 몸 안쪽에 설치해야 하니까요. 이 모터에서 나오는 회전력을 톱니바퀴, 벨트나 체인 등으로 힘을 전달해 로봇의 몸에 붙은 관절을 움직이는 식입니다. 일단 골격을 만들고, 안 쪽에 모터나 전기회로를 집어넣고, 마지막에 얼기설기 튀어나올 수밖에 없는 전선과 반도체 회로를 보호하기 위해 케이스를 한 번 더 붙여줍니다.
꼭 그런 것은 아닙니다만, 두발로봇은 대부분 갑각류 형입니다. 그러다 보니 자동차의 생김새가 다 비슷비슷한 것처럼, 두발로봇들도 생김새나 움직임이 거의 다 대동소이합니다. 아시모부터 시작해서 KAIST의 휴보, 도요타의 파트너, 한국과학기술연구원(KIST)의 마루, 일본산업기술연구원(AIST)의 HRP시리즈 등을 보면 잘 알 수 있습니다.
유일한 예외가 있는데, 미국의 군사용 로봇 제작업체인 보스톤다이나믹스에서 만든 두발로봇은 유압식 액추에이터를 써서 만들었기 때문에 포유류 형태를 하고 있습니다. 국내에서 포유류 형태의 유압식 로봇을 개발하고 있는곳은 한국생산기술연구원이 있습니다. 두발로봇은 아닙니다. 네발 짐꾼 로봇인 진풍, 입는 로봇 하이퍼 등이 유명한데, 모두 유압식 액추에이터를 쓰고 있고, 몸 안쪽에 뼈대를 가지고 있습니다.
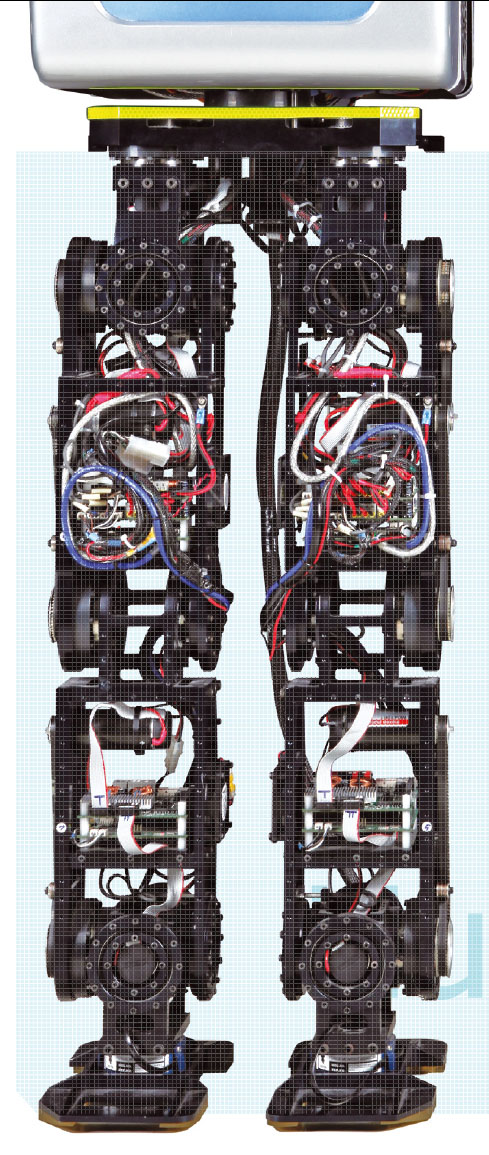
 [(좌)휴보2의 골격. 전형적인 갑각류 형 뼈대를 갖고 있다. 재료는 알루미늄합금으로 2004년 만든 휴보1과 똑같지만 무게는 10kg이나 줄었다. (우)한국생산기술연구원이 개발한 네발 짐꾼로봇 ‘진풍’. 견마로봇이라는 별명으로 더 유명하다. 유압식 액추에이터를 쓰는 국내에선 대표적인 ‘포유류 형’ 로봇이다. 크기가 작아 눈에 잘 띄지 않지만 관절 주위에 붙여 주면 사람의 근육처럼 움직이는 ‘선형 액추에이터’를 사용한다. 골격 주변으로 압력오일을 보내고 받는 파이프가 보인다.]
[(좌)휴보2의 골격. 전형적인 갑각류 형 뼈대를 갖고 있다. 재료는 알루미늄합금으로 2004년 만든 휴보1과 똑같지만 무게는 10kg이나 줄었다. (우)한국생산기술연구원이 개발한 네발 짐꾼로봇 ‘진풍’. 견마로봇이라는 별명으로 더 유명하다. 유압식 액추에이터를 쓰는 국내에선 대표적인 ‘포유류 형’ 로봇이다. 크기가 작아 눈에 잘 띄지 않지만 관절 주위에 붙여 주면 사람의 근육처럼 움직이는 ‘선형 액추에이터’를 사용한다. 골격 주변으로 압력오일을 보내고 받는 파이프가 보인다.]
서비스 로봇은 갑각류 형이 유리
포유류 형 로봇이라고 해서 꼭 긴 실린더와 피스톤을 온몸에 주렁주렁 붙이고 있는 것은 아닙니다. 유압식 액추에이터 중에도 크기가 아주 작은 것들이 있고, 회전운동을 하는 것도 있습니다. 리니어 모터라고 해서, 회전운동이 아니라 직선운동을 하는 전기 모터를 쓸 수도 있습니다.
물론 이런 근육을 뼈대에 연결하는 방식도 여러 가지가 있습니다. 전기모터처럼 무언가 ‘회전’하면서 힘을 내는 장치를 액추에이터로 썼다면 그 힘을 로봇이 팔, 다리를 뻗는 힘으로 바꿔주는 장치가 필요합니다. 유압액추에이터 등은 두 개, 세 개의 구동장치가 적절히 움직이면서 서로 협력하도록 만드는 게 중요합니다. 이런 연결 방식은 ‘감속기’라고 부르는 부품과 관련이 많기 때문에 나중에 따로 소개해 드릴까 합니다.
두 가지 방식은 모두 장단점이 있어서 어떤 것이 더 유리하다고 단정 짓기는 어렵습니다만, 사람의 곁에서 살아야 할 ‘지능형 서비스로봇’은 갑각류 형태가 더 유리할 거라고 보는 시각이 많습니다. 유압식은 힘이 워낙 강해 군사용이나 산업현장에서 더 각광받고 있습니다.
넓은 의미에서 보면 자동화 된 기계는 모두 로봇으로 구분할 수 있습니다. 워낙 다양한 형태가 있기 때문에 그런걸(골격구조) 애써서 구분할 필요가 있느냐고 반문하는 기술자들도 만난 적이 있습니다.
하지만 ‘로봇’ 이라는 단어는 어딘가 인간을 닮았을 거라는, 그리고 앞으로도 인간을 닮아갈 거라는 믿음을 줍니다. 사람이 두 발로 걷고, 달리고, 춤출 수 있는 이유는 그런 모습으로 태어났기 때문입니다. 두발로봇의 뼈대가 점점 더 발전한다면, 언젠가는 사람과 함께 춤추는 로봇도 태어날 거라고 믿습니다.
휴보센터는 원래 KAIST 기계공학과 기계제어연구실(MC Lab)에서 출발했습니다. 말 그대로 ‘기계를 제어하는 기술’을 연구하는 게 목적이라서 새로운 물질을 합성하거나, 모터 같은 정밀 기계장치를 직접 개발하지는 않습니다. 당연히 여러 가지 잡다한 부품도 직접 만들지 않습니다. 세상에 나와 있는 부품 중에 규격에 맞는 것을 골라 쓰면 되니까요.
하지만 이런 휴보센터도 결국은 수억 원을 넘는 돈을 주고 결국 부품 깎는 기계를 구입했습니다. 로봇의 골격을 직접 만들어 쓰기 위한 겁니다. 로봇의 골격은 움직일 때 몸을 지탱해 주고, 배터리, 전기를 나누어 주는 배전기, 컴퓨터, 전기모터와 각종센서 등을 붙일 수 있는 로봇의 기본적인 뼈대를 말합니다.
[휴보1(왼쪽)과 휴보2의 모습. 자세히 살펴보면 휴보2가 한결 날씬한 체격인 것을 확인할 수 있다.]
[휴보2의 3차원 설계도. 휴보2의 무게는 불과 37kg(배터리는 제외).]
로봇에게 골격이 중요한 이유
자동차 마니아들은 복잡한 튜닝과정을 거쳐 자동차의 성능을 더 높이려고 합니다. 엔진이나 변속기, 타이어 같은 부품을 더 좋은 것으로 바꿔주는 것인데, 튜닝을 계속할수록 분명히 차는 더 빨라지고, 운전하기도 편해질 것입니다. 하지만 아무리 개조를 거듭해도 차의 기본적인 성격은 바꿀 수 없습니다. 바퀴의 간격, 차체의 무게중심 같은 것은 골격(프레임) 자체를 바꾸지 않는 한 변하지 않으니까요. 결국 기본 구조가 뛰어나지 못하면 아무리 좋은 엔진이나 변속기, 첨단 안전장치를 달아 주어도 명품 차가 되기는 어렵습니다.
이런 골격의 중요성은 로봇도 마찬가지입니다. 실제로 휴보도 부품 깎는 기계를 들여오고 나서부터 한층 더 가벼워지고 튼튼해졌습니다. 휴보2는 휴보센터에서 직접 뼈대부품을 만들어가면서 개발한 로봇입니다. 휴보1(55kg)에 비해 몸무게가 10kg이나 더 가벼워졌는데도 훨씬 튼튼하고 훨씬 더 잘 걷습니다. 휴보 아빠인 오준호 교수는 “휴보2가 두 발로 달릴 수 있게 되고, 걸음걸이도 한결 더 늠름해진 원인은 여러 가지가 있지만 월등히 좋아진 골격구조 역할이 가장 크다”고 말했을 정도니까요.
그렇다면 ‘로봇의 좋은 골격’이란 어떤 것일까요. 사람이나 동물의 뼈를 생각해 보면 알 수 있습니다. 뼈가 하는 일은 크게 세 가지입니다. 첫째로 신체를 지지하고 중요한 내장기관을 보호해 주는 ‘기둥’ 역할을 합니다. 두 번째로는 근육과 연결돼, 근육이 내는 힘을 받아들여 몸을 움직이게해 주는 ‘지렛대’ 역할도 맡고 있습니다. 세 번째로는 뼈 속, 즉 골수에서 혈액을 만듭니다. 로봇의 뼈가 혈액을 만들 필요는 없습니다만, 다른 두 가지 기능은 당연히 똑같습니다. 적은 힘으로도 잘 움직여야 하니 무게 중심이 잘 맞아야 하고 가벼워야 합니다. 그런데 충격에 잘 견디고 빠르게 움직이려면 반대로 묵직하고 튼튼할 필요도 있습니다. ‘가볍지만 튼튼해야 한다’는 기계 설계의 최대 숙제는 로봇에도 그대로 적용됩니다.
[한국과학기술연구원(KIST)이 개발한 마루Z의 다리. 기본 구조가 휴보와 닮은 점이 많다. 재료도 알루미늄합금으로 만든 데다 같은 ‘갑각류 형’이기 때문이다.]
새우 닮은 두발로봇, 사람 닮은 네발로봇
그렇다면 로봇의 골격구조는 어떤 것들이 있고, 어떻게 만들까요. 로봇의 골격 구조는 크게 두 종류로 나눕니다. 사람처럼 뼈의 바깥을 근육이 감싸고 있는 ‘포유류 형’과 새우나 게처럼 뼈대가 몸을 감싸고 있는 ‘갑각류 형’이 그것입니다. 과학동아 3월호를 통해 로봇의 근육인 액추에이터를 소개해 드렸습니다만, 실제로 로봇의 골격 구조는 어떤 종류의 근육을 쓰는지에 따라 달라집니다.
유압식 액추에이터를 사용하는 경우에는 강철처럼 튼튼한 막대 같은 것을 가운데 세워두고 앞, 뒤로 액추에이터를 붙여 줍니다. 액추에이터는 피스톤 작용을 하면서 전체적인 크기가 늘거나 줄어들기 때문에 거기에 따라서 뼈대가 움직입니다. 결국 뼈의 앞뒤로 근육이 붙어 있는 사람의 팔다리와 비슷한 구조입니다.
전기모터는 주로 갑각류 형 로봇에 많이 쓰입니다. 이런 갑각류 형 구조를 가진 로봇에 굳이 한자어로 이름을 붙여 보자면 ‘외골격 로봇’이라고 하면 좋겠습니다만, 그 이름을 쓸 수는 없습니다. 실제로 외골격 로봇이란 군인이나 공장에서 일하는 작업자들의 힘을 세게 만들어 주는 ‘입는 로봇’이라는 뜻으로 이미 쓰고 있기 때문입니다. 처음 입는 로봇을 만들던 미국의 로봇과학자들이 입는 로봇을 ‘외골격(exoskeleton) 로봇’이라고 부른 다음 고유명사처럼 굳어진 경웁니다. 따라서 편의상 저는 갑각류 형이라고 부르는게 좋지 않나 생각하고 있습니다.
전기모터를 쓰는 로봇은 대부분 갑각류 형으로 만듭니다. 전기모터를 몸 안쪽에 설치해야 하니까요. 이 모터에서 나오는 회전력을 톱니바퀴, 벨트나 체인 등으로 힘을 전달해 로봇의 몸에 붙은 관절을 움직이는 식입니다. 일단 골격을 만들고, 안 쪽에 모터나 전기회로를 집어넣고, 마지막에 얼기설기 튀어나올 수밖에 없는 전선과 반도체 회로를 보호하기 위해 케이스를 한 번 더 붙여줍니다.
꼭 그런 것은 아닙니다만, 두발로봇은 대부분 갑각류 형입니다. 그러다 보니 자동차의 생김새가 다 비슷비슷한 것처럼, 두발로봇들도 생김새나 움직임이 거의 다 대동소이합니다. 아시모부터 시작해서 KAIST의 휴보, 도요타의 파트너, 한국과학기술연구원(KIST)의 마루, 일본산업기술연구원(AIST)의 HRP시리즈 등을 보면 잘 알 수 있습니다.
유일한 예외가 있는데, 미국의 군사용 로봇 제작업체인 보스톤다이나믹스에서 만든 두발로봇은 유압식 액추에이터를 써서 만들었기 때문에 포유류 형태를 하고 있습니다. 국내에서 포유류 형태의 유압식 로봇을 개발하고 있는곳은 한국생산기술연구원이 있습니다. 두발로봇은 아닙니다. 네발 짐꾼 로봇인 진풍, 입는 로봇 하이퍼 등이 유명한데, 모두 유압식 액추에이터를 쓰고 있고, 몸 안쪽에 뼈대를 가지고 있습니다.
서비스 로봇은 갑각류 형이 유리
포유류 형 로봇이라고 해서 꼭 긴 실린더와 피스톤을 온몸에 주렁주렁 붙이고 있는 것은 아닙니다. 유압식 액추에이터 중에도 크기가 아주 작은 것들이 있고, 회전운동을 하는 것도 있습니다. 리니어 모터라고 해서, 회전운동이 아니라 직선운동을 하는 전기 모터를 쓸 수도 있습니다.
물론 이런 근육을 뼈대에 연결하는 방식도 여러 가지가 있습니다. 전기모터처럼 무언가 ‘회전’하면서 힘을 내는 장치를 액추에이터로 썼다면 그 힘을 로봇이 팔, 다리를 뻗는 힘으로 바꿔주는 장치가 필요합니다. 유압액추에이터 등은 두 개, 세 개의 구동장치가 적절히 움직이면서 서로 협력하도록 만드는 게 중요합니다. 이런 연결 방식은 ‘감속기’라고 부르는 부품과 관련이 많기 때문에 나중에 따로 소개해 드릴까 합니다.
두 가지 방식은 모두 장단점이 있어서 어떤 것이 더 유리하다고 단정 짓기는 어렵습니다만, 사람의 곁에서 살아야 할 ‘지능형 서비스로봇’은 갑각류 형태가 더 유리할 거라고 보는 시각이 많습니다. 유압식은 힘이 워낙 강해 군사용이나 산업현장에서 더 각광받고 있습니다.
넓은 의미에서 보면 자동화 된 기계는 모두 로봇으로 구분할 수 있습니다. 워낙 다양한 형태가 있기 때문에 그런걸(골격구조) 애써서 구분할 필요가 있느냐고 반문하는 기술자들도 만난 적이 있습니다.
하지만 ‘로봇’ 이라는 단어는 어딘가 인간을 닮았을 거라는, 그리고 앞으로도 인간을 닮아갈 거라는 믿음을 줍니다. 사람이 두 발로 걷고, 달리고, 춤출 수 있는 이유는 그런 모습으로 태어났기 때문입니다. 두발로봇의 뼈대가 점점 더 발전한다면, 언젠가는 사람과 함께 춤추는 로봇도 태어날 거라고 믿습니다.