“촤악~.”
영화를 보다가 나도 모르게 앞으로 손을 쭉 뻗었다. ‘스파이더맨’에서 주인공이 손을 뻗어 거미줄을 발사하는 장면에서였다. 손목에서 찌릿한 진동이 느껴지더니 정말 거미줄이 발사되는 것처럼 진동이 손목을 지나 손끝으로 옮겨갔다. 기자가 낀 촉각장갑에는 80개의 진동 장치가 들어 있다. 이 진동 장치들은 장면에 따라 영화 속 주인공이 느끼는 것과 같은 자극을 전달했다.
“신기하게 촉각장갑 하나 꼈을 뿐인데도 영화 속 주인공의 행동을 따라하게 되죠? 그만큼 촉감은 어떤 대상에 몰입하는 데 지대한 영향을 끼쳐요.” 촉감기술연구센터를 운영하고 있는 광주과학기술원 기전공학과 류제하 교수의 설명이다.
류 교수와 연구원들은 이곳에서 촉각장갑처럼 진동과 회전력이 만든 촉각 자극을 사람에게 재현하거나 이를 감지하는 장치를 만들고 있다. 촉각 정보를 영상과 함께 처리하는 알고리즘을 개발하고 촉각 시스템을 안전하게 사용할 수 있는 방법도 함께 연구한다. 하드웨어와 소프트웨어를 모두 다루는, 촉각과 관련한 종합 연구센터인 셈이다.
TV 보며 연예인 얼굴을 만진다?
연구센터의 풍경은 마치 촉각 장비 박람회장 같은 분위기를 자아낸다. 모양과 기능이 제각각인 촉각 재현 장치들이 즐비하기 때문이다. 7년 전부터 대형 전시장에서 일반인들에게 촉각기술을 시연해왔다는 연구단은 시연 준비가 능숙했다.
‘햅틱 전화기’만 경험해본 사람이라면 이곳의 촉각 재현 장치들을 보고 두 가지에 놀란다. 하나는 촉각기술을 적용해서 개발된 분야가 생각보다 많다는 점. 그리고 또 하나는 표면의 거칠기나 재질처럼 미세한 촉각 자극을 구분할 만큼 움직임이 정교하다는 점이다. 연구단은 홈쇼핑에서 소개하는 물건 만지기, 붓 모양의 조이스틱을 잡고 화면에 글씨 쓰기, 화면에 띄운 사진의 재질 느끼기처럼 다양하고 재밌는 촉각 기술용 소프트웨어를 개발해 선보였다.
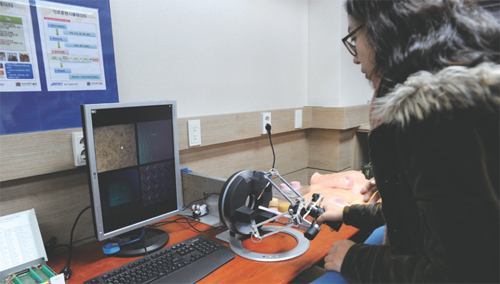
세 개의 지지대와 연결된 공 모양의 조이스틱을 잡고 이리저리 움직여봤다. 화살표 모양의 커서가 나타나더니 조이스틱이 움직이는 대로 따라다녔다. 컴퓨터 모니터에 모래판, 굵은 요철이 있는 철판, 매끈한 욕실 타일처럼 재질과 표면 상태가 달라 보이는 사진들을 띄우고 커서를 옮겼다. 모래판에서는 거친 모래의 재질감이, 철판의 요철에서는 바닥으로부터 밀리는 느낌이 났다. 욕실용 타일 위는 부드럽고 매끄러웠다. 류 교수는 “마찰계수를 낮추고 진동을 줄여 부드러운 표면을 표현한다”고 설명했다. 넋을 잃고 조이스틱으로 표면을 쓰다듬는 기자에게 류 교수가 재미있는 말을 한다.
“촉각 기술이 상용화되면 가장 먼저 해보고 싶은 게 뭐냐고 사람들에게 물었더니 좋아하는 연예인들의 얼굴을 만져보는 거라고 말했답니다. 촉각은 사람들의 은밀한 감성을 충족시켜주는 매우 매력적인 감각이에요.”

촉각 장치에 통신 결합하면 원격 수술 가능
촉각 재현 장치를 개발하는 데 가장 중점을 둬야 하는 부분은 장치의 안정성이다. 촉각 재현 장치는 양방향으로 힘을 전달하기 때문에 시스템이 불안정하면 사용자에게 상해를 입히거나, 장비에 물리적인 손상이 올 수 있다. 연구센터의 김영미 박사는 “시스템 사이에서 드나들거나 소모되는 에너지 차이를 분석해 시스템의 안정성을 판단하는 연구를 함께 진행하고 있다”고 말했다.
또 힘과 회전력을 빠르고 정확하게 계산해야 한다. 사람의 촉각 기관이 가상으로 재현되는 촉각 정보를 사실적으로 느끼게 하려면 힘과 회전력 정보를 계산하는 과정과 이를 재현 장치에 보내는 과정이 빠르게 이뤄져야 한다.
원격 기술이 지금보다 안정되고 발전하면 촉각 기술의 상용화는 더 빨라질 전망이다. 원격 조작에서는 사람이 직접 작업하기 어려운 곳에서 사람을 대신해 로봇이 작업을 수행할 수 있다. 현재 일부 병원에서 의료용 로봇 다빈치가 환자의 수술에 쓰이고 있지만 원거리 통신을 이용한 수술은 아직까지 불가능하다.
원격 조작에는 두 대의 촉각 재현 장치가 필요하다. 하나는 사람이 조작하는 마스터 장치, 또 다른 하나는 직접 대상을 만지는 슬레이브 장치다. 마스터의 위치 정보가 통신채널을 통해 슬레이브로 전달되면 슬레이브는 마스터의 움직임을 따라 움직인다. 그리고 슬레이브는 끝에 붙어 있는 센서로 대상과 접촉이 이뤄질 때 발생하는 힘을 측정해 마스터 쪽으로 전송한다. 조작자는 이 힘을 느낌으로써 대상의 강성(단단한 정도)을 구별한다.
류 교수는 “통신채널을 통해 데이터를 주고받을 때 발생하는 시간 지연, 로봇이 강성을 구분할 때의 시간 지연이 원격 조작 시스템의 안정성에 결정적인 영향을 미친다”며 “이를 해결하기 위해 특성화된 재현 장치와 안정된 알고리즘을 개발하는 연구에 박차를 가하고 있다”고 말했다.