 “슈우욱~.”
“슈우욱~.”KAIST 휴머노이드로봇연구센터(이하 휴보센터) 연구원이 노트북을 한 손에 받쳐 들고 키보드를 두드렸다. 무선 랜으로 명령을 받은 로봇 한 대가 무릎을 구부리며 ‘준비 땅’ 자세를 취했다.
“철컥 철컥 철컥~.”
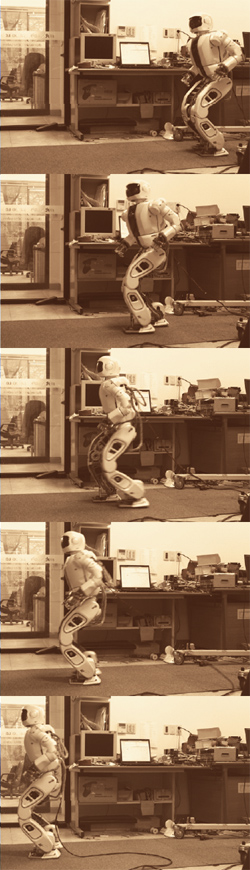
로봇은 곧 제자리 뛰기를 시작했다. 한 걸음씩 뗄 때마다 금속관절을 움직이며 기계 발자국 소리를 냈다. 발걸음에 맞춰 호흡을 가다듬는 인간의 숨소리 같이 느껴졌다. 로봇은 잠시 몸을 푸나 싶더니 사람처럼 상체를 좌우로 흔들며 앞으로 달려 나왔다.
5m 정도의 거리를 뛰어오더니 자기를 만들어준 연구원 앞에 딱 멈춘다. “슈우욱~.” 다시 잔잔한 모터소리를 내며 무릎을 펴고 선다. ‘한 번 더 뛸까요?’라고 물어보는 듯했다. 기자가 인간형 로봇 ‘휴보2’의 달리기 기능을 처음 목격한 순간이었다. 휴보센터 관계자 이외에는 처음이었다.
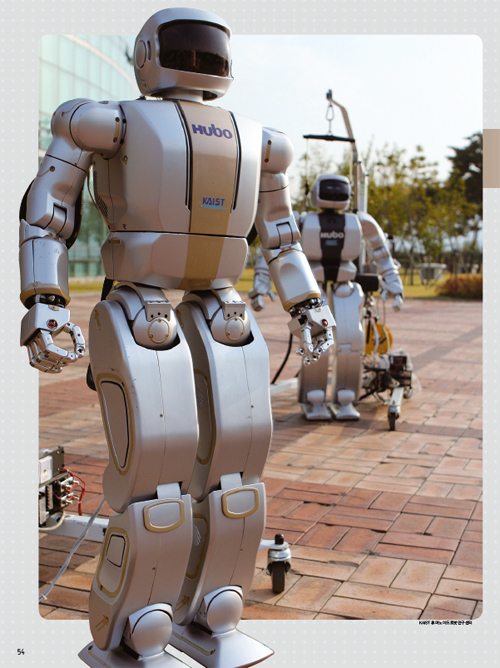
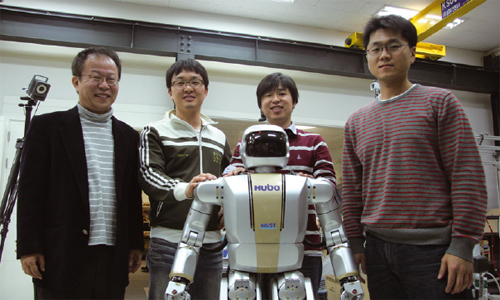
두 발로 달리는 인간형 로봇이 개발됐다. 국내 최초, 세계 3번째다. 휴보센터는 인간형 로봇 휴보2를 개발해 지난 11월 말 동아사이언스에 두 발로 달리는 모습을 최초로 공개했다. 이어 며칠 뒤인 12월 3일 지식경제부가 주최하는 ‘대한민국 로봇대상 및 로봇산업인의 밤’ 행사에 서 휴보2를 정식으로 소개했다. 이날이 휴보2(개발코드KHR-4)가 태어난 생일인 셈이다.
지금까지 개발된 달리는 인간형 로봇은 일본 혼다의 아시모, 도요타의 파트너뿐이다. 소니의 큐리오 같은 소형로봇이 두 발로 달린 적은 있지만 사람 크기가 아니라는 점에서 동등한 평가는 받기 어렵다. 달리는 로봇 휴보2는 어떻게 만들어졌을까. 기자가 5년 동안 단독 취재한 휴보센터의 연구개발 과정을 공개한다.
과제1 한 발로 뛰기
 ‘달린다’는 말은 특별하다. 아무리 빨리 걸어도 이 말을 들을 수는 없다. 땅을 박차고 떠올라 살짝 날아가야만 인정해 준다. 1초에도 수차례씩 뛰어오르고, 그때마다 무게중심을 맞춰야 한다. 동물이 아닌 기계가 이런 동작을 하도록 만드는 것은 결코 쉽지 않은 일이다.
‘달린다’는 말은 특별하다. 아무리 빨리 걸어도 이 말을 들을 수는 없다. 땅을 박차고 떠올라 살짝 날아가야만 인정해 준다. 1초에도 수차례씩 뛰어오르고, 그때마다 무게중심을 맞춰야 한다. 동물이 아닌 기계가 이런 동작을 하도록 만드는 것은 결코 쉽지 않은 일이다.휴보센터에서 달리는 로봇을 개발하기 시작한 시기는 2005년. 휴보센터 센터장인 오준호 KAIST 기계공학과 교수는 조백규 박사(당시 박사과정생)를 담당연구자로 선정했다. 휴보2의 몸체를 만들고, 팔과 다리의 운동을 기존 휴보에 비해 세련되게 다듬는 일은 동료 연구원인 김민수 박사에게 맡겼다. 조 박사가 달리기 한 가지만 연구하도록 배려한 것이다. 그가 KAIST에서 박사학위를 받은 것도 이 ‘달리기 기능’을 구현하는 연구를 한 덕분이다.
조 박사는 먼저 달리기의 기본인 ‘한 발로 제자리뛰기’ 연구를 시작했다. 사람이 달릴 수 있는 이유 중 하나는 한 발을 들고, 남은 한쪽 발로 땅을 박차고 뛰어오를 수 있기 때문이다. 그래야 두 발을 차례로 교차시키며 앞으로 계속 달려 나갈 수 있다. 조박사는 결국 로봇이 발목 힘만으로 위쪽으로 뛰어오르는 호핑(hopping) 기능부터 개발해야 한다고판단했다.
그는 먼저 로봇 KHR-1에서 다리 한 짝을 떼어와 러닝머신 위에 매달았다. KHR-1은 2001년 만들어진 구형이지만 국내 최초로 만들어진 걷는 로봇이라서 휴보와 닮은 점이 많았다. 조 박사는 이 로봇의 발목 각도를 바꿔보고, 모터의 힘과 동작 속도도 바꿔봤다. 다리가 뛰어 오르는 높이, 방향 등 모든 것을 꼼꼼히 기록했다.
이 과정에서 한 가지 문제점을 발견했다. 로봇의 발이 계속해서 뛰어오르다 보니 지면과 부딪치며 전해져 오는 충격이 적지 않았다. 심할 때는 자기 무게의 3배에 달했다. 이 충격을 줄이기 위한 대책을 마련하기 시작했다. 로봇의 발바닥에는 패드를 설치하고, 발목과 무릎에는 충격흡수장치(shock absorber)를 만들어 달았다.
과제2 발 딛는 타이밍이 중요해
1년이 지나 어느 정도 데이터가 쌓이자 조 박사는 로봇의 두 다리를 차례로 교차시키며 뛰어나가는 동작의 패턴(pattern)을 연구하기 시작했다.
사람이나 두 발 로봇이 달릴 때는 양 발을 어떻게 움직여야 할까. 왼쪽 발을 땅에 내리기 전에 오른쪽 발이 지면을 밀고 뛰어올라야 한다. 그리고 30~40ms(밀리초, 1ms는 1000분의 1초) 정도를 날아간다. 왼쪽 발을 땅에 내려놓고, 오른쪽 발을 땅에 내리기 전에 왼쪽 발로 땅을 박차며 다시 날아올라야 한다.
사람이라면 무의식적으로 할 수 있지만 기계로 이 동작을 구현하는 일은 그리 녹록하지 않다. 거기다 매 번 충격이 전해져와 무게중심을 흐트러뜨린다. 그때마다 시시각각으로 모터와 감속기를 어떻게 제어해야할지, 충격흡수를 어떻게 할지를 그 동작 순서대로 일일이 정해 줘야 한다. 오준호 교수는 “호핑 연구가 1차원적인 움직임이라면 로봇이 앞으로 달려 나가는 패턴 연구는 2차원”이라고 해석했다.
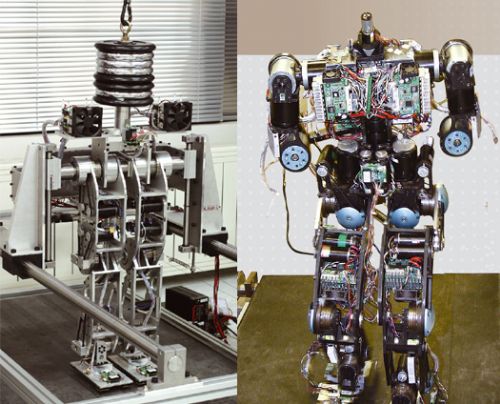
동작 패턴을 연구하기 위해 연구팀은 하반신뿐인 실험용 로봇을 하나 만들었다. ‘KHR-플레이너(Planar)’ 라는 이름의 이 로봇은 허리 부분을 굵은 파이프에 연결해 러닝머신 위에서만 달리도록 만들어졌다. 즉 앞뒤로는 걷거나 달릴 순 있지만 좌우로는 움직이지 않도록 단단하게 고정해 둔 로봇이다. 플레이너는 평면, 즉 2차원이라는 뜻이다.
이 로봇을 이용해 다시 지루한 반복실험을 계속했다. 실험을 하다 과열된 기계가 타 버리는 날도 종종 있었다. 양 다리를 교차시키는 속도를 바꿔보고, 발을 땅에서 들어 올리는 타이밍을 계속해서 바꿔 나갔다. 발바닥과 발목의 모양도 조금씩 바꿔 봤다. 그때마다 조금씩 달리기 패턴이 안정돼 갔다. 또 다시 1년반 이상의 시간이 훌쩍 지나갔다.
과제3 상반신을 비틀어라
 2008년 조 박사는 연구실 한쪽에 세워져 있던 또 다른 로봇을 한 대 끌어왔다. 2005년 발표된 휴보(KHR-3)의 원형이 됐던 로봇 KHR-2였다. 안정성이나 모터성능 등이 조금 차이가 났지만 기본적인 성능과 구조는 휴보와 똑같은 로봇이다.
2008년 조 박사는 연구실 한쪽에 세워져 있던 또 다른 로봇을 한 대 끌어왔다. 2005년 발표된 휴보(KHR-3)의 원형이 됐던 로봇 KHR-2였다. 안정성이나 모터성능 등이 조금 차이가 났지만 기본적인 성능과 구조는 휴보와 똑같은 로봇이다.이 로봇에 그동안 매달렸던 호핑, 패턴 연구의 결과를 적용해 달리기 기능을 ‘실제로’ 구현하는 게 목표였다. 지금껏 1, 2차원 단계의 연구를 했다면 이제부터 현실(3차원)에서 연구하는 셈이다. KHR-2가 휴보2보다 무겁다는 점을 감안해 불필요한 팔과 머리를 떼어내고 상반신과 다리만 남겼다.
기본 이론은 완성했으니 개발도 비교적 빨랐다. 불과 2주 만에 로봇은 제자리 뛰기 동작을 할 수 있었다. 얼마 지나지 않아 러닝머신 위에서 혼자 달릴 수 있게 됐다. 하지만 문제가 생겼다. 로봇이 몇 걸음은 잘 달리는 듯하더니 곧 쓰러지는 것이 아닌가. 처음에는 원인을 알지 못해 고민했다. 갖가지 노력을 기울였다. 발동작을 조금 빨리 해봤다가 무게중심이 엇갈려 로봇이 뒤로 뛰어오르며 나동그라진 적도 있었다.
이 연구과정을 조 박사는 “신물 나도록 지겨웠다”고 표현했다. 그는 “한 번 넘어지면 프레임이 뒤틀려 처음부터 로봇을 다시 조립하고, 필요할 경우는 부품을 바꿔주는 작업을 해야 했다”면서 “하루 종일 몇 번 달려보지도 못하고 분해와 조립만 하는 지겨운 일정이 계속됐다”고 당시를 회상했다.
원인은 예상치 못한 곳에서 나왔다. 사람이나 로봇이 두 발로 달릴 경우는 측면으로 밀어내는 힘도 작용한다. 그때마다 옆으로 충격이 오니 조금만 달리면 중심을 잃고 쓰러지는 것이다. 답은 다시 인간의 달리기 모습을 관찰해서 얻을 수 있었다. 두 발의 움직임에 맞춰 상반신을 좌우로 돌려가며 무게중심을 맞춰 주는 것이다. 걷기기능만 구현할 때는 모양새에 불과했던 상반신의 역할이 한층 중요해진 셈이다.
물론 이런 동작을 하려면 고도의 제어기술이 필요하다. 로봇이 전후좌우에서 오는 충격을 모두 감지해야 하고, 그에 맞춰 발동작뿐 아니라 상체 비틀기 동작까지 해야 한다. 무게중심을 감지하는 자이로센서, 경사도와 속도를 측정할 수 있는 가속도센서, 관성의 정도를 측정하는 모멘텀센서 등이 휴보2 곳곳에 숨어 있는 이유다.
과제4 넘어지지 말것
2008년 3월 온몸에 전깃줄을 주렁주렁 매단 로봇 KHR-2가 드디어 러닝머신 위에서 달리기 시작했다. 3년간의 노력이 빛을 보는 순간이었다. 공식발표 순서에 따르면 세계에서 두 번째로 달릴 수 있는 로봇은 분명 2009년 8월 개발된 도요타의 ‘파트너’가 맞다. 하지만 정말로 세계에서 2번째로 달린 로봇은 2008년 3월 개발된 KHR-2가 아닐까.
아직 숙제는 남아 있었다. KHR-2의 달리기 기능을 휴보2에 이식해야 했다. 그리고 구현된 달리기 기능을 좀 더 안정적으로 가다듬어야 했다.
연구팀은 아예 달리기 기능 개발용으로 휴보2를 한 대 더 만들었다. 모든 기능을 구현했으니 작업이 쉬울 것 같았지만 의외로 더뎠다. KHR-2가 처음 달린 뒤 휴보2가 달리기 기능을 완성한 것은 2009년 11월이었다. 1년 반 이상을 매달린 셈이다.
가장 까다로운 문제는 휴보2와 KHR-2의 설계가 다르다는 점. 발의 모양도, 두 발 사이의 간격도 모두 달랐다. 더구나 휴보2는 무게가 훨씬 가벼워 10kg 이상 차이가 났다. 오 교수는 “팔과 다리 모두 한결 경량화됐다”며 “KHR-2가 덩치 큰 승용차라면 휴보2는 날렵한 스포츠카에 비할 만하다”고 설명했다. 휴보2의 몸무게는 37kg. 배터리를 포함해도 45kg밖에 되지 않는다. 도요타의 파트너는 50kg이 넘는다. 다시 지루한 과정이 시작됐다. 연구해 뒀던 모든 수치를 다시 계산하고, 일일이 실험해 보는 수밖에 없었다.
이 과정에서 조 박사는 새로운 기능을 개발해 넣었다. 휴보2가 안정적으로 달릴 수 있는 이유 중 하나인 중심회복 능력이다. 달리던 휴보2를 앞이나 뒤에서 손으로 밀어도 잠시 주춤거리다 곧 중심을 회복하고 그대로 다시 달릴 수 있다. KHR-2 때는 이 기능이 미처 완성되지 않았다. 한 발을 뒤로 뻗어 버티고 선 채로 정지하는 수준에서 만족했다.
완성된 휴보2는 당연히 KHR-2보다 한결 빠르고 안정적이다. KHR-2의 달리는 속도는 시속 2km 정도. 두 발의 보폭은 20cm 정도였다. 이에 비해 휴보2는 시속 3km 정도의 속도로 달린다. 최대속도는 시속 3.6km다. 두 발의 최대 보폭은 30cm로 넓어졌다. 5년에 가까운 연구개발이 드디어 빛을 본 것이다.
이런 노력을 들여 로봇을 꼭 두 발로 걷고 달리게 할 필요가 있는 걸까. 여기에 대해선 일부 전문가들조차 회의적이다. 로봇이 꼭 인간형이어야 할 이유가 없다는 지적도 나온다. 그러나 영화에서처럼 로봇이 사람의 생활 속에 들어와 함께 살아가기를 꿈꾼다면,그 로봇은 인간의 모습을 하고 인간처럼 움직여야만하지 않을까. 달리기 기능은 그런 로봇이 가져야 할 기본적인 능력인 셈이다.
오 교수는 “걷고 달리게 된것은 인간형 로봇 연구의 시작에 불과하다”며 “이제부터 더 다양한 연구가 시작될 것”이라고 말했다. 대한민국 대표 인간형 로봇 ‘휴보’를 만들고 있는 휴보센터. 이들의 행보가 어디까지 이어질지 궁금하다.
동영상으로 본 휴보2 탄생기록