 “텔미 텔미 테테테테 텔미~”
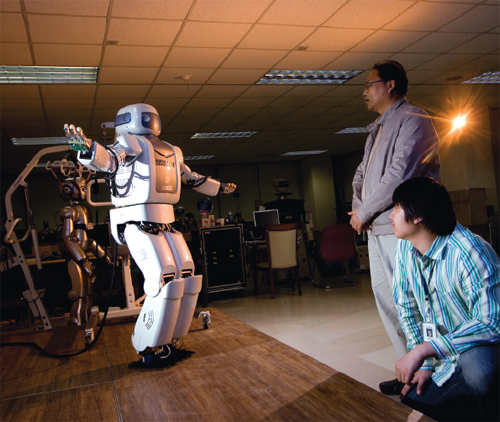
“텔미 텔미 테테테테 텔미~”음악에 맞춰 걸으며 원더걸스의 텔미 춤을 따라 하는 로봇 마루. 3년 전 처음 선보였을 때 조심스런 걸음걸이와 손동작이 전부였던 휴머노이드 로봇이 어떤 업그레이드를 했길래 이처럼 근사한 ‘춤꾼’이 됐을까.
“몸치인 사람도 춤동작을 배워 반복 연습하면 몸에 익어 그럴듯하게 춤을 출 수 있듯이 마루도 다양한 동작을 배우면서 좀 더 자연스러운 휴머노이드 로봇으로 거듭나고 있습니다.”
한국과학기술연구원 인지로봇연구단 유범재 단장은 마루 업그레이드의 비밀은 로봇자체(하드웨어)가 아니라 로봇을 움직이는 기술(소프트웨어)에 있다고 설명했다. 지난 2005년 1월 두 다리로 걷는 인간형 로봇 마루를 선보여 주목을 받았던 인지로봇연구단은 2005년 11월 마루Ⅱ, 2006년 12월 마루Ⅲ를 잇달아 선보였다. 이처럼 로봇 하드웨어 성능을 개선하는 연구와 함께 좀 더 자연스러운 동작을 할 수 있게 해주는 연구에도 박차를 가했다.
네트워크 기반 로봇은 소프트웨어가 관건
 “사람처럼 움직이는 느낌이 나려면 사람의 동작을 정확히 모방해야 합니다. 저희가 사람 동작을 읽어 들여 로봇 동작으로 바꾸는 연구를 하는 이유입니다.”
“사람처럼 움직이는 느낌이 나려면 사람의 동작을 정확히 모방해야 합니다. 저희가 사람 동작을 읽어 들여 로봇 동작으로 바꾸는 연구를 하는 이유입니다.”연구단의 김창환 박사는 마루가 사람의 동작을 자연스럽게 따라할 수 있는 방법을 연구하고 있다. 모델이 되는 사람이 주요 관절부분의 위치를 알려주는 센서가 달린 모션캡처 의상을 입고 다양한 동작을 한다. 그러면 센서가 시간에 따른 위치 변화 데이터를 컴퓨터로 전송한다. 물론 무선 네트워크를 통해서다. 컴퓨터는 이 데이터를 로봇 마루의 몸에 맞게 변환한 뒤 마루에게 보낸다. 명령을 받은 마루는 사람이 한 동작을 따라한다. 이 과정에 걸리는 시간은 1초도 되지 않는다. 사실상 실시간으로 동작을 따라하는 셈. 그런데 로봇이 사람 동작을 실시간으로 따라하는 모습이 재미있기는 하지만 실용적인 면에서는 별다른 의미가 없지 않을까.
“사람들의 다양한 동작 하나하나를 모아 일종의 데이터베이스(DB)를 만들 계획입니다. 궁극적으로 휴머노이드 로봇은 상대인 사람이 예측할 수 있는 자연스러운 동작을 해야 하는데 이런 DB를 토대로 최적의 움직임을 추출해내지요.”
 김 박사는 그 예로 컵을 잡는 방식을 설명했다. 컵이 놓인 주변 환경에 따라 사람은 옆에서 손잡이를 잡기도 하고 위에서 들어 올릴 수도 있듯이 로봇도 궁극적으로는 그래야 한다는 것. 현재 인지로봇연구단이 네크워크에 기반한 로봇 연구에 집중하는 이유도 이 때문이다. 상황에 맞는 다양한 동작을 하기 위해서는 엄청난 양의 데이터베이스가 있어야 하고 환경변화에 맞춰 반응하려면 굉장히 빠른 속도로 연산을 해야 하는데 이런 시스템을 로봇 안에 탑재하면 로봇 몸통이 거대해지기 때문이다.
김 박사는 그 예로 컵을 잡는 방식을 설명했다. 컵이 놓인 주변 환경에 따라 사람은 옆에서 손잡이를 잡기도 하고 위에서 들어 올릴 수도 있듯이 로봇도 궁극적으로는 그래야 한다는 것. 현재 인지로봇연구단이 네크워크에 기반한 로봇 연구에 집중하는 이유도 이 때문이다. 상황에 맞는 다양한 동작을 하기 위해서는 엄청난 양의 데이터베이스가 있어야 하고 환경변화에 맞춰 반응하려면 굉장히 빠른 속도로 연산을 해야 하는데 이런 시스템을 로봇 안에 탑재하면 로봇 몸통이 거대해지기 때문이다.“휴머노이드 개발 방향은 크게 2가지입니다. 로봇 하나가 사람처럼 독립적으로 존재하는 방식과 저희처럼 네트워크 시스템에서 명령을 받아 움직이는 경우죠.”
유범재 단장은 네트워크 기반 휴머노이드 로봇을 휴대전화에 비유했다. 처음에는 전화를 걸고 받는 일만 했지만 네트워크를 이용하면서 현재는 여러 기능을 할 수 있게 된 것처럼 로봇도 마찬가지라는 것. 뿐만 아니라 네트워크 컴퓨터를 공유하는 로봇 사이의 협력 작업도 가능할 것으로 예상했다.
이번에 마루가 선보인 동작 가운데 가장 의미가 있는 움직임은 팔을 움직이면서도 걸음을 옮길 수 있다는 점이다. 사람이야 팔을 고정하고 걷는 게 더 어색하지만 로봇에게는 팔을 움직이면서 걷는다는 게 무척 어려운 일이다. 자칫 잘못하면 몸의 균형을 잃어 넘어지기 십상이기 때문이다.
“휴머노이드 로봇 개발의 궁극적인 목표는 사람을 도와 일할 수 있는 로봇입니다. 만일 걸음을 멈춘 채 팔을 움직여야한다면 동작이 어색하고 할 수 있는 일의 범위가 제한될 겁니다.”
유 단장은 휴머노이드 로봇 연구가 결국은 인간에 대한 이해의 폭을 넓히는데 기여할 것이라고 말했다. 로봇을 연구하다보면 두발로 걷는다는 게 얼마나 복잡하고 미묘한 움직임인지 절감할 수 있기 때문이다. 실제로 두발로 걷는 로봇이 실용화되려면 아직 많은 난관을 극복해야 한다. 따라서 먼저 상용화될 가정용 로봇은 두발로 걷는 대신 바퀴로 움직이는 ‘모바일’형이 될 전망이다.
5년 뒤 가정용 로봇 상용화될 듯
 이번에 선보인 ‘마루-M’이 주목받는 이유다. 마루-M의 M은 모바일(Mobile)의 머리글자로 얼핏 보면 앉아있는 것처럼 보이지만 사실 밑은 바퀴다. 이처럼 바퀴로 움직이는 로봇을 모바일 로봇이라고 한다. 마루-M은 얼굴 양쪽에 있는 렌즈(사람의 눈에 해당)로 앞에 펼쳐진 이미지를 포착해 네트워크로 컴퓨터에 데이터를 전송한다. 만일 사람이 마루-M에게 “컵을 집어와”라고 명령하면 마루-M의 음성인식시스템이 명령을 해석해 컴퓨터로 보낸다. 네크워크 컴퓨터에서 이미지 데이터를 분석해 테이블 위의 놓여있는 물건의 종류와 위치를 인식한 뒤 동작 명령을 마루-M으로 보내고 로봇은 컵을 향해 팔을 뻗어 집는다.
이번에 선보인 ‘마루-M’이 주목받는 이유다. 마루-M의 M은 모바일(Mobile)의 머리글자로 얼핏 보면 앉아있는 것처럼 보이지만 사실 밑은 바퀴다. 이처럼 바퀴로 움직이는 로봇을 모바일 로봇이라고 한다. 마루-M은 얼굴 양쪽에 있는 렌즈(사람의 눈에 해당)로 앞에 펼쳐진 이미지를 포착해 네트워크로 컴퓨터에 데이터를 전송한다. 만일 사람이 마루-M에게 “컵을 집어와”라고 명령하면 마루-M의 음성인식시스템이 명령을 해석해 컴퓨터로 보낸다. 네크워크 컴퓨터에서 이미지 데이터를 분석해 테이블 위의 놓여있는 물건의 종류와 위치를 인식한 뒤 동작 명령을 마루-M으로 보내고 로봇은 컵을 향해 팔을 뻗어 집는다.“앞으로 로봇이 얼마나 빨리 발전할 수는 알 수 없지만 5~6년 뒤에 마루-M 같은 유형의 가정용 로봇이 상용화되지 않을까요. 가격은 2000만원 이하가 돼야겠지요.”
유 단장은 현재 중형차보다는 값이 싸야 사람들이 로봇을 살 것으로 전망했다. 마루-M 스타일의 로봇은 가사보조 외에도 1:1 영어회화 선생님이 될 수도 있고 내기 장기 상대가 될 수도 있다. 한편 마루 같은 이족 로봇은 워낙 복잡한 시스템이기 때문에 조금 더 먼 미래에나 상용화될 전망이다. 2025년쯤 되면 저녁 식사 뒤 로봇과 나란히 산책하며 담소를 나누는 모습을 여기저기서 볼 수 있지 않을까.
뭐든지 따라할 수 있다니까요
 “마루-M이 내 동작을 따라하는 모습을 처음 봤을 때 깜짝 놀랐고 기분이 이상했습니다. 생각보다 잘 움직이는 것 같아요.”
“마루-M이 내 동작을 따라하는 모습을 처음 봤을 때 깜짝 놀랐고 기분이 이상했습니다. 생각보다 잘 움직이는 것 같아요.”10월 16일부터 코엑스에서 열린 ‘로봇월드 2008’에서 로봇의 실시간 따라 하기 동작의 모델이 된 이지운 씨는 위치 센서가 달린 옷을 입은 채 계속 새로운 동작을 보였다. 주위에서 둘(이지운 씨와 마루-M)을 바라보는 연구자들의 눈빛이 복잡 미묘하다.
“마루의 골격은 사람과 비슷하기는 하지만 비례하지는 않기 때문에 어떤 동작은 따라 하기 어렵습니다. 너무 무리한 동작을 하면 안 되는데….”
로봇이 시연 ‘행사’를 뛸 때마다 전국 방방곡곡을 따라다니며 실제 작동을 맡고 있는 나성권 연구원은 마루가 움직이다가 쓰러지거나 고장이 날까봐 늘 불안하다고 한다. 처음엔 어색한 듯 조심스럽게 팔을 움직이던 이씨는 곧 익숙해져 컵을 잡고 물을 마시는 행동이나 부엌에서 칼질을 하는 동작을 취하기도 한다.
“마루-M이 다양한 동작을 제법 잘 따라하는군요. 부품 수천 개로 이뤄진 로봇이 이처럼 멋지게 작동하는 게 놀랍지 않습니까.” 마루-M이 모델의 동작을 따라하는 모습을 멀찌감치 서서 바라보던 유범재 단장의 입가에 흐뭇한 미소가 번졌다.