1997년 7월 장난감 자동차처럼 생긴 10.5kg짜리 로봇차량이 화성표면을 탐사했던 적이 있다. 소저너라는 이 소형 로봇차량은 크고 작은 바위를 만나면 피해다녀야 했다.
하지만 8월 20일 CNN뉴스에 전해진 미항공우주국(NASA) 과학자들의 최근 연구에 따르면, 앞으로 화성표면 탐사에서 이런 불편이 사라질 전망이다. 이들의 아이디어는 바로 집채만한 크기의 구형탐사장비를 이용하는 것이다. ‘텀블위드 로버’라는 이 장비는 화성의 자연적인 바람을 추진력으로 움직일 수 있고 장애물을 피하는 것이 아니라 장애물 위로 굴러 넘을 수 있다.
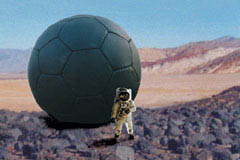
구르는 로봇 텀블위드 로버는 가볍고 가스를 주입해 부풀게 하며, 안쪽에 탄력있는 줄로 카메라와 탐사장비를 매어둘 수 있다. 특별히 관심있는 지역에 도착하면 일부 가스를 빼내 정지할 수 있고, 일단 원하는 근접관측을 끝내면 다시 가스를 주입해 이동할 수 있다. 실제 NASA 과학자들은 미국 모하비사막에서 크기 1.5m짜리 공을 모델로 실험했다. 실험 결과 어깨높이의 이 장치는 모래언덕 4백여m를 터지지 않고 쏜살같이 달렸다. 경사진 모래벼랑도 잘 올라갔다.
이 실험에 관여한 과학자 잭 존스 박사는“이것이 충분히 크다면, 거칠 것이 없다”고 강조했다. 과학자들은 이보다 4배 큰 공은 화성에서 부는 바람 정도라면 커다란 바위를 타고 넘을 수 있고 경사가 25˚보다 높은 경사면도 굴러 올라갈 수 있을 것으로 예상했다. 또 이동속도는 시속 35km 정도로 추정됐다. 텀블위드 로버는 화성뿐만 아니라 해왕성의 위성 트리톤이나 목성의 위성 이오에서도 사용될 수 있을 것으로 보인다.