심해는 인간에게 도전의 대상이었다. 심해는 어떻게 생겼을까. 인간은 얼마나 깊이 들어갈 수 있을까. 최근 심해가 새로운 연구분야이자 자원의 보고로 등장하면서 탐사정들도 새모습으로 바뀌고 있다.
인간이 바다 깊이 들어갈 수 있는 한계는 40m 정도. 보통사람은 30m를 들어가기도 힘들다. 이러한 한계 때문에 바다는 늘 신비로운 대상이었다. 그러나 첨단 장비들이 개발되면서 바다는 그 실체를 드러내기 시작했다.
현재까지 알려진 바로는 필리핀 근처 마리아나해구가 지구에서 가장 깊은 바다다. 그 깊이는 1만1천m로 에베레스트산(8천8백48m)이 빠져들 만하다. 1960년 1월 23일 2명의 승무원을 태운 미국의 트리에스테-2는 이곳에서 1만9백12m를 내려가 세계인들을 깜짝 놀라게 했다. 영국의 존 헌트가 에베레스트를 처음 등정한지 7년 후의 일이다.
미국과 프랑스의 자존심 싸움
심해저에 대한 유인 탐사는 1930년 미국의 C. W. 비브가 심해잠수구를 개발해 9백23m를 잠수하면서 본격적으로 시작됐다. 이때 사용된 심해잠수구는 선박과 줄로 연결돼 있었기 때문에 해저에서 자유롭게 움직이지 못했다. 선박과 분리된 유인탐사정은 1948년 스위스의 물리학자인 A. 피카르가 처음 개발했다. FNRS-2라고 불리는 이 탐사정은 2천5백m를 잠수했다. 이때부터 미국과 프랑스의 자존심 싸움이 시작됐다.
1954년 프랑스는 A. 피카르로부터 FNRS-2를 구입해 개조함으로써 6천m급 심해잠수정 FNRS-3을 개발했다. 같은 해 미국 해군은 A. 피카르가 개발한 트리에스테를 구입해 1만2천m급 트리에스테-2를 개발했다. 트리에스테-2는 1960년 FNRS-3이 세운 4천1백m의 기록을 깨고 수심 1만9백12m의 잠수 기록을 세웠다. A. 피카르의 아들 쟈크 피카르와 돈 왈쉬 중위가 이 기록의 주인공이 됐다. 프랑스는 이듬해 1만1천m급 아르키메데스를 건조했지만 신기록 수립을 놓쳤다.
어느 나라가 더 깊이 들어가나 하는 경쟁은 이제 더 이상 무의미해지기 시작했다. 더 깊이 들어갈 만큼 바다가 깊지 않기도 하지만 실질적인 탐사쪽으로 눈을 돌렸던 까닭이다. 1964년 건조된 앨빈은 그런 의미에서 많은 화제를 낳았다.
앨빈은 3명이 탑승할 수 있도록 설계됐다. 앨빈의 특징은 가솔린 대신에 미소한 유리구를 수지로 고착시킨 부력재를 개발해 완벽한 부력을 확보한 점이다. 또 초고장력강으로 내압체를 제작함으로써 잠수정을 경량화하는데 크게 공헌했다. 3차원 운동이 가능하고 위치를 확인하는 장치와 작업장비를 갖춘 앨빈은 탐사뿐 아니라 해저 기물을 수리하는 일도 맡았다.
기동력을 갖춘 앨빈은 1968년 스페인 해안에 빠진 수소폭탄을 회수하고, 1979년 동태평양에서 열수광상을 발견해 심해가 자원의 보고임을 밝혀내는 혁혁한 공을 세운다. 또 심해저에서 살고 있는 생물들을 발견하기도 했다. 1985년 로버트 발라드는 앨빈을 타고 북극해에 침몰한 호화여객선 타이타닉을 찾아내 세계를 흥분케 했다. 앨빈은 수심 4천m에서 지금도 탐사활동을 벌이고 있다.
섬나라인 일본은 남다르게 해양에 대한 애착을 가지고 있다. 또 지진이 자주 발생하기 때문에 해저 지질에 대한 관심도 크다. 1969년 처음으로 6백m급 심해잠수정 신카이를 개발하기 시작해, 1991년 6천5백m급 신카이 6500을 개발했다. 신카이 6500은 태평양의 심해저 지층이 특별한 균열을 이루고 있는 것을 발견하는 활약을 보였다.
무인탐사로봇 맹활약
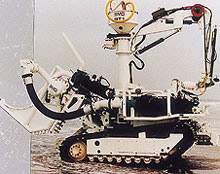
심해저에 대한 비밀이 하나 둘씩 벗겨지면서 무인탐사로봇들도 개발되기 시작했다. 인간이 얼마나 깊은 바닷속에서 활동하는가 하는 것보다 과학적인 조사와 군사적인 특수 목적, 그리고 심해자원 개발이 중요해지기 시작하면서부터다. 이러한 일을 하기 위해서 굳이 위험을 무릅쓰고 인간이 깊은 바다에 들어갈 필요가 없었기 때문이다.
무인탐사로봇(ROV, Remotely Operated Vehicle)은 1953년 처음 실험기종이 만들어졌으나 1960년대에 들어서서 실용화되기 시작했다. 무인탐사로봇은 과학 분야에서 해저 관측과 시료 채취를, 군사 분야에서 기뢰 제거와 구난 작업을, 환경 분야에서 해양오염 제거와 해저 준설을, 자원개발 분야에서 석유 탐사와 심해저 망간단괴 채광을, 그리고 산업 분야에서 해저 광케이블을 매설하거나 보수하는 등 많은 일을 한다.
앨빈이 미공군기 B52가 잘못 떨어뜨린 수소폭탄을 찾아내고 타이타닉의 사진을 찍을 수 있었던 것은 사실 CURV와 아르고라는 무인탐사로봇의 도움 때문이었다. 1973년 미해군이 만든 무인탐사로봇 CURV-III는 아일랜드 근처 수심 4백20m에 침몰한 유인잠수정 PISCES-III에서 2명의 승무원을 구출해내기도 했다. 무인탐사로봇들은 1986년 불운하게 폭발하고 말았던 우주비행선 챌린저를 바닷속에서 찾아내고, 1987년 남아프리카 항공기의 블랙박스를 수심 4천5백m에서 건져내기도 했다.
현재 세계적으로 유명한 심해저 무인탐사로봇으로는 미국의 JASON(6천m급) ATV(6천m급) GEMINI-II(6천m급) CURV-III(6천m급) MAGELLAN 725(7천m급), 프랑스의 ROVIN(6천m급), 그리고 일본의 가이코(1만1천m급) 등이 있다.
선박과 줄로 연결된 무인탐사로봇(ROV)에 비해 자율형 무인탐사로봇(AUV, Autonomous Underwater Vehicle)은 선박과 줄이 연결돼 있지 않다. 그래서 자유롭게 움직일 수 있다는 것이 자율형의 장점. 그러나 에너지를 로봇 내부에 내장해야 하고 선박과의 통신속도가 늦기 때문에 스스로 판단해 행동할 부분이 많다. 그래서 자율형에는 인공지능과 같은 특수한 설계가 필요하다. 아직까지 자율형 무인탐사로봇이 이룬 성과들은 적지만 21세기에는 심해저 탐사에서 주도적인 역할을 할 것으로 보여 선진국 등에서 개발이 활발하게 이뤄지고 있다.
미국은 1959년 북극해 해저 탐사를 위해 연구를 시작해 1967년 SPURV-1를 개발했다. 현재 미국은 6천m급으로 ABE, AUSS, Odyssey II, SEA FLOOR ROVER 등을 보유하고 있다. 프랑스는 1979년 초음파로 원격 조정이 가능한 자율형 무인탐사로봇을 만들어 4천2백m를 잠수하는데 성공했다. 일본에서는 물새(Water Bird)를 개발해 1989년 수심 30m에서 실험에 성공했고, 현재 수심 4백m에서 운행이 가능한 R1을 만들고 있다. 자율형 무인탐사로봇의 핵심기술은 얼마나 목적 수행을 잘 하는가, 얼마나 깊은 곳에서 작동되는가에 있다.
1986년 우리나라는 한국 최초의 유인탐사정을 개발한 바 있다. 한국기계연구원이 개발한 2백50m급 3인승 '해양 250'이 바로 그것으로 현재 해양연구소에서 활용하고 있다. 한국기계연구원은 1993년 3백m급 무인탐사로봇 'CROV 300'을 개발했고, 한국철력(주)에게 기술을 이전했다. 한국철력(주)은 벌써 2대의 판매실적을 올리고 있다. 1992년부터 해저 6천m급 자율형 무인탐사로봇(AUV)을 연구해 온 대우중공업은 현재 개발을 완료해 시험 중에 있다. 그 로봇의 이름은 '옥포-6000'.
심해탐사정과 무인탐사로봇의 연구는 우리나라에서 아직 미진한 분야다. 한국기계연구원 선박해양공학연구센터의 홍석원박사는 "이러한 연구를 필요로 하는 기본적인 수요가 적기 때문"이라고 그 이유를 설명했다. 수요가 적기 때문에 국가와 기업에서 기술개발에 신경을 덜 쓴다는 얘기다. 현재 한국기계연구원은 1만m급 무인탐사로봇(ROV)과 2백m급 자율형 무인탐사로봇(AUV)를 개발하고 있다. 같은 연구센터에 근무하는 이판묵 선임연구원은 "ROV는 이용 분야가 넓어 상업적으로 이용가능성이 높고, AUV는 선진 기술력 확보가 주안점"이라고 말하고 있다.
대우중공업 선박해양기술연구소의 장휴정박사는 "옥포 6000을 개발하는 것은 기술력을 확보한다는 측면과 더불어 한국에서 자율형 무인탐사로봇을 개발했다는 상징적 의미를 지니고 있다"고 말한다. 대우중공업은 옥포 6000을 개발하면서 러시아 극동연구소로부터 심해탐사에 필요한 핵심기술을 이전받았다.
한반도 주변에는 그리 깊은 바다가 없다. 그래서 얼마나 깊은 바다에 들어가는 탐사정을 개발하는가는 과학적인 기술력 확보와 상징적인 의미를 빼면 실질적으로 큰 의미가 없다는 것이 이 분야 전문가들의 말이다. 오히려 심해저 망간단괴를 개발하고 대륙붕을 개발하기 위한 '목적에 맞는 것'을 개발하는 것이 현실적이라고 입을 모으고 있다.