이른 아침, 카드 한 장이 도착했어.
‘어린이과학동아’의 동갑내기 친구를 찾아라!
동갑내기라면 ‘어린이과학동아’가 2004년에 처음 나왔으니까…, 7살? 세상에 7살이 얼마나 많은데…, 이걸 어떻게 찾아? 가만 여기 힌트가 있네.

힌트
➊ 딱딱하다.
➋ 대전에 있다.
➌ 로봇이다.
➍ 아빠는 카이스트의 오준호 교수님이다.
휴보센터를 소개합니다
‘어린이과학동아’의 동갑내기 친구는 바로 휴보였어. 휴보도 2004년에 태어났거든. 그래서 도착한 이 곳은? 바로 대전에 있는 KAIST 휴머노이드 로봇연구센터야. 그럼 이제 휴보를 만나러 가 볼까?

어서 와요. 여기가 바로 휴보가 태어나 자란 곳이랍니다. 휴보의 설계부터 골격인 팔과 다리, 몸속에 들어가는 부품까지 모두 여기서 만들지요. 힘과 무게, 방향을 감지하는 센서도 개발한답니다. 이렇게 만들어진 센서들은 휴보의 몸 곳곳에 들어가 휴보가 넘어지지 않고 자연스럽게 팔과 다리를 움직일 수 있도록 도와 줘요.
오준호 (KAIST 휴머노이드 로봇연구센터장)
휴보, 쑥쑥 발전하다!
지난 7년 동안 휴보는 계속 발전해 왔어요.휴보1은 세계에서 두 번째이자 국내 최초로 개발된 두 발로 걷는 로봇으로 이름을 알렸어요. 하지만 달릴 수는 없었지요. 또 손가락을 펴고 접을 순 있어도 물건을 집을 수는 없었답니다.
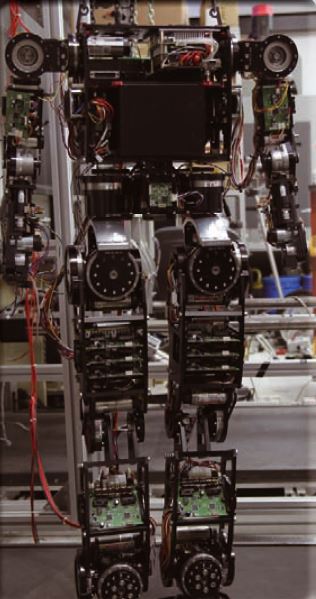
하지만 휴보2는 최대 시속 3.6㎞로 달리고 물건도 척척 집을 수 있어요. 무게도 줄였어요. 배터리를 뺀 휴보2의 무게는 37㎏으로, 휴보1보다 10㎏이나 가볍답니다. 덕분에 모터가 더 강한 힘으로 오래 작동할 수 있게 됐어요.

휴보2
손가락
휴보1에 사용된 넓은 벨트 대신 가느다란 와이어를 손가락 사이에 넣어 물건도 집을 수 있게 됐다.
허벅지
200W 출력의 모터가 달려 있어 빨리 달릴 수 있다
발목
땅의 경사를 감지하는 센서가 들어 있다.
골격
휴보2의 골격은 알루미늄 합금으로 만들어졌다. 휴보1보다 무게가 10㎏나 적게 나가 같은 모터로 더 큰 힘을 낼 수 있다.
몸의 중심
배 아래쪽에 몸의 위치와 움직임을 감지해 균형을 잡는 평형센서가 있어 넘어지지 않고 잘 달릴 수 있다.
손목
삼차원으로 돌아가는 모터를 달아 사람처럼 손목을 빙빙 돌릴 수 있게 됐다. 또 손목에 힘을 측정하는 센서가 있어 손으로 전해지는 힘의 방향과 크기 등을 알 수 있다.
더 똑똑하고 유연해진 휴보 2 + 를 만나다!
지금은 2009년에 선보였던 휴보2를 더욱 정교하게 만들고 있어요. 고장률도 줄이고, 더 쉽게 조작할 수 있게 만드는 거죠. 처음 휴보2를 만들었을 때는 전원을 켜면 10번에 9번은 모터가 타버리곤 했어요. 지금은 그 반대가 됐죠. 또 팔과 다리, 몸통도 전보다 더 빠르고 부드럽게 움직일 수 있답니다. 이렇게 완성도를 높인 휴보2⁺는 올해 말까지 미국과 싱가포르 등 10개국에 연구용으로 수출될 계획이에요
‘어린이과학동아’의 동갑내기 친구를 찾아라!
동갑내기라면 ‘어린이과학동아’가 2004년에 처음 나왔으니까…, 7살? 세상에 7살이 얼마나 많은데…, 이걸 어떻게 찾아? 가만 여기 힌트가 있네.
힌트
➊ 딱딱하다.
➋ 대전에 있다.
➌ 로봇이다.
➍ 아빠는 카이스트의 오준호 교수님이다.
휴보센터를 소개합니다
‘어린이과학동아’의 동갑내기 친구는 바로 휴보였어. 휴보도 2004년에 태어났거든. 그래서 도착한 이 곳은? 바로 대전에 있는 KAIST 휴머노이드 로봇연구센터야. 그럼 이제 휴보를 만나러 가 볼까?
어서 와요. 여기가 바로 휴보가 태어나 자란 곳이랍니다. 휴보의 설계부터 골격인 팔과 다리, 몸속에 들어가는 부품까지 모두 여기서 만들지요. 힘과 무게, 방향을 감지하는 센서도 개발한답니다. 이렇게 만들어진 센서들은 휴보의 몸 곳곳에 들어가 휴보가 넘어지지 않고 자연스럽게 팔과 다리를 움직일 수 있도록 도와 줘요.
오준호 (KAIST 휴머노이드 로봇연구센터장)
휴보, 쑥쑥 발전하다!
지난 7년 동안 휴보는 계속 발전해 왔어요.휴보1은 세계에서 두 번째이자 국내 최초로 개발된 두 발로 걷는 로봇으로 이름을 알렸어요. 하지만 달릴 수는 없었지요. 또 손가락을 펴고 접을 순 있어도 물건을 집을 수는 없었답니다.
하지만 휴보2는 최대 시속 3.6㎞로 달리고 물건도 척척 집을 수 있어요. 무게도 줄였어요. 배터리를 뺀 휴보2의 무게는 37㎏으로, 휴보1보다 10㎏이나 가볍답니다. 덕분에 모터가 더 강한 힘으로 오래 작동할 수 있게 됐어요.
휴보2
손가락
휴보1에 사용된 넓은 벨트 대신 가느다란 와이어를 손가락 사이에 넣어 물건도 집을 수 있게 됐다.
허벅지
200W 출력의 모터가 달려 있어 빨리 달릴 수 있다
발목
땅의 경사를 감지하는 센서가 들어 있다.
골격
휴보2의 골격은 알루미늄 합금으로 만들어졌다. 휴보1보다 무게가 10㎏나 적게 나가 같은 모터로 더 큰 힘을 낼 수 있다.
몸의 중심
배 아래쪽에 몸의 위치와 움직임을 감지해 균형을 잡는 평형센서가 있어 넘어지지 않고 잘 달릴 수 있다.
손목
삼차원으로 돌아가는 모터를 달아 사람처럼 손목을 빙빙 돌릴 수 있게 됐다. 또 손목에 힘을 측정하는 센서가 있어 손으로 전해지는 힘의 방향과 크기 등을 알 수 있다.
더 똑똑하고 유연해진 휴보 2 + 를 만나다!
지금은 2009년에 선보였던 휴보2를 더욱 정교하게 만들고 있어요. 고장률도 줄이고, 더 쉽게 조작할 수 있게 만드는 거죠. 처음 휴보2를 만들었을 때는 전원을 켜면 10번에 9번은 모터가 타버리곤 했어요. 지금은 그 반대가 됐죠. 또 팔과 다리, 몸통도 전보다 더 빠르고 부드럽게 움직일 수 있답니다. 이렇게 완성도를 높인 휴보2⁺는 올해 말까지 미국과 싱가포르 등 10개국에 연구용으로 수출될 계획이에요