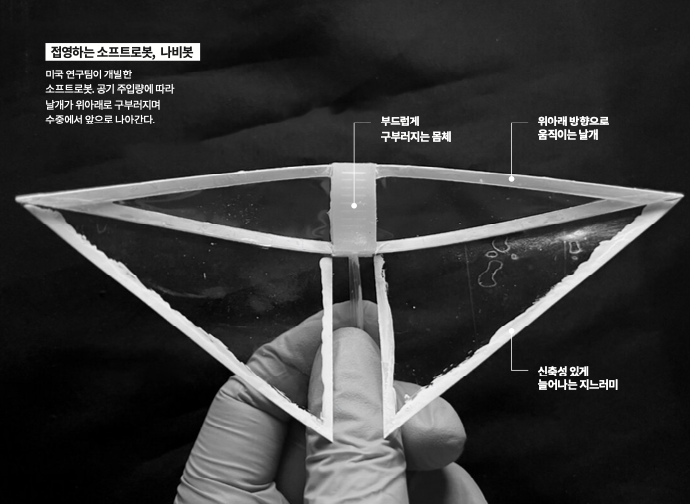
바다를 헤엄치는 가오리에서 영감을 받아 만든 소프트로봇이 수영 속도를 4배로 높이는 데 성공했다. 개발팀은 향상된 수영 동작이 사람이 접영(butterfly stroke)을 할 때의 팔 움직임과 비슷하다는 데 착안해 소프트로봇에 ‘나비봇’이라는 이름을 붙였다.
미국 노스캐롤라이나주립대 연구팀은 제트 엔진이나 프로펠러와 같은 추진체 없이 1초에 자기 몸길이의 3.74배 거리를 수영하는 소프트로봇을 개발해 국제학술지 ‘사이언스 어드밴스’ 11월 18일자에 발표했다.doi: 10.1126/sciadv.add3788
나비봇의 날개는 ‘똑딱핀’과 유사하게 움직인다. 똑딱핀은 일정 이상의 힘을 가하면 모양이 바뀐 뒤 그 상태를 유지하고, 또 일정 이상의 힘을 반대로 가하면 원래의 모양으로 되돌아온다. 나비봇의 날개도 가해지는 힘에 따라 모양을 번갈아 바꾼다. 날개는 부드러운 실리콘 몸체와 연결돼 있는데, 이 몸체는 외부에서 공기를 주입하면 부풀어올랐다가 다시 공기를 빼면 수축한다. 양 날개는 몸체가 일정 수준 이상 부풀어 올랐을 때 구부러졌다가, 몸체가 수축하면 다시 반대로 구부러지도록 만들어졌다.
기존의 소프트로봇은 날개에 무거운 모터를 부착해 구동했지만 나비봇은 몸체에 공기를 주입하는 방식을 이용함으로써 로봇 전체 무게를 크게 줄였다. 이로써 이전에 추진체 없이 가장 빠르게 수영한 로봇의 속도(1초에 몸길이 0.78배 거리 이동)보다 4.8배 빠른 속도를 갖게 됐다. 정확한 속도는 1초당 85.27mm다. 연구팀은 지느러미 사이의 몸체를 둘로 나눠 좌우 회전이 용이한 나비봇도 개발했다.
인 지에 노스캐롤라이나주립대 교수는 “나비봇에 공기를 주입하기 위해 가느다란 관을 연결해야 하는 한계가 있다”며 “추후 별도의 관 없이도 자율적으로 수축, 팽창하는 나비봇을 개발할 것”이라고 밝혔다.