가는 비가 흩뿌리던 4월 29일 오후 7시. 이따금 갈매기 울음 소리만 들려오던 충남 태안 신진항의 한 횟집이 갑자기 시끌벅적댔다. "가까이 가보니 대접이 엎어져 있더라고요. 팔을 살짝 넣어서 그릇을 뒤집은 다음에 집었어요." "와~, 실력이 나날이 느네요!" 무용담을 쏟아낸 열댓 명의 남자들은 선박해양플랜트연구소 수중로봇연구팀 소속의 연구원들. 이야기 속 주인공은 이들이 수 년 동안 만들고 다듬은 다관절 복합이동 해저로봇인 '크랩스터'다. 크랩스터는 해저 200m급 무인 잠수정(ROV)이다. 게와 가재를 닮아 이런 이름이 붙었다. 2016년 개발 완료 예정인데, 이번에는 해저 유물 발굴 가능성을 알아보기 위해 4월 16일부터 국립해양문화재연구소와 공동으로 실험을 시작했다. 이 곳에 머문 지 13일 만인 이 날 오후, 1년 전 실험을 위해 미리 빠뜨려둔 샘플 도자기를 처음으로 건져 올렸다. 조촐하지만, 끊임없이 환한 웃음들이 터져 나오던 저녁자리는 그래서 마련됐다. 전봉환 수중로봇실장은 "실험을 시작한 이후 매일매일 기록을 경신하고 있다"고 말했다.
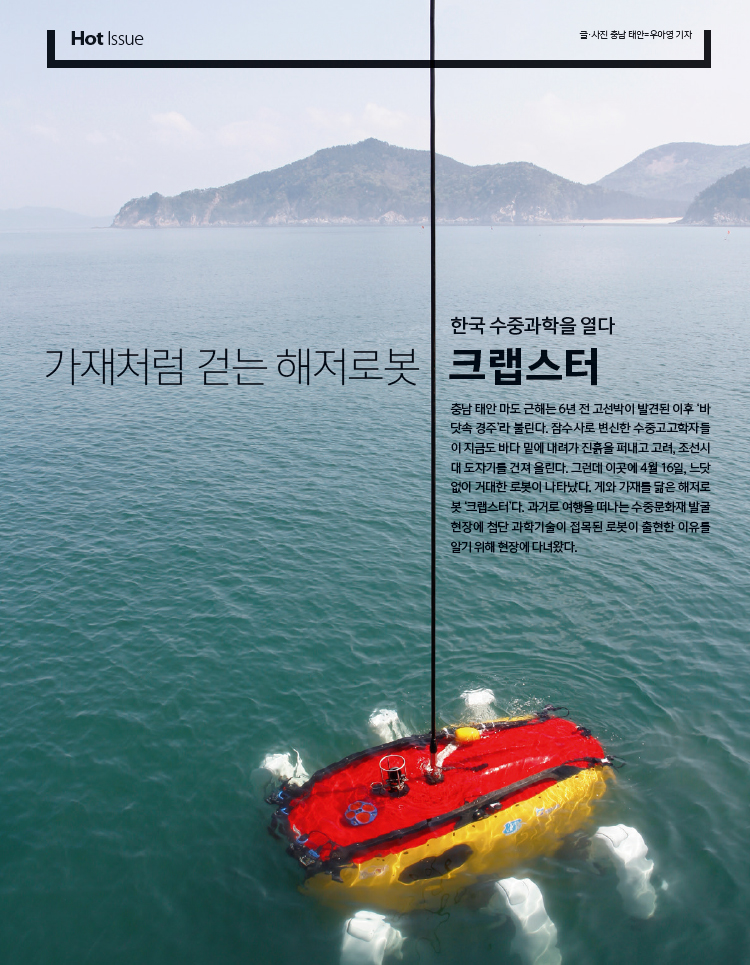
가재 걸음으로 강한 조류 극복한다
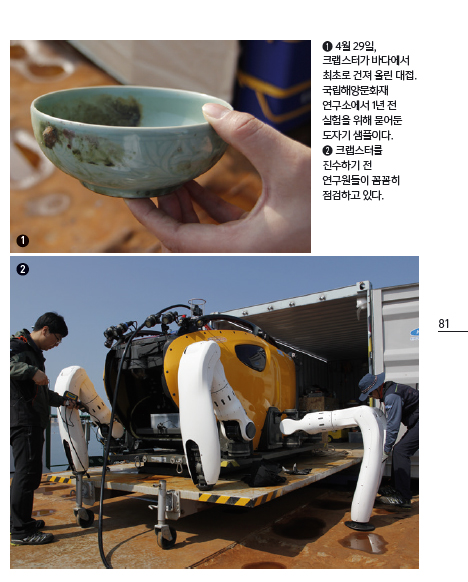
다음 날 오전 8시. 성원 3호를 타고 15분을 달리자 노란 조종실을 얹은, 짙게 녹 슨 철제 바지선에 도착했다. 사람 키의 세 배쯤 돼 보이는 하얀 크레인이 파랗게 갠 하늘을 배경으로 위풍당당하게 기자를 맞았다. 크랩스터를 옮기는 전용 크레인이다. 바지선에 오르자마자 유승열 선임연구원이 무언가를 쑥 내밀었다. 지난 밤 축하 파티의 주인공인 푸른 도자기 대접이었다. 여기저기에 묻은 진흙이, 물 속에 잠들어 있던 지난 1년을 가늠케 했다.
바지선이 출렁이고 있는 태안 마도 근해는 '바닷속 경주'라 불린다. 지금까지 우리나라가 발굴한 고선박은 13척인데, 그 중 4척이 이 곳에서 발견됐다. 예로부터 서해는 외국과 교역하고 화물을 수송하는 데 중요한 항로였지만, 물살이 거세고 암초가 많아 배가 좌초되기 쉬웠다. 최근에서야 발굴된 조선시대 난파선에서는 수많은 분청사기와 조선백자 등이 온전한 형태로 발견됐다. 만약 이번 실험에서 크랩스터의 성능이 확인되면, 고고학자들이 직접 물 밑으로 내려가는 일을 최대한 줄이면서 수중문화재를 발굴할 수 있을 터였다. 바다와 수중고고학, 그리고 첨단기술이 만나는 현장이었다.
8시 35분, 격납고 문이 열리고 소형차 만한(가로 세로 각 2.4m, 높이 1.3m) 크랩스터가 모습을 드러냈다. 빨간색 천장에 각종 센서와 조명, 그리고 전력을 공급하고 데이터를 주고 받는 검은 케이블 등이 달려 있었다. 몸체는 밀봉돼 있지 않았다. 10m 들어갈 때마다 1기압씩 더해지는 수압을 상쇄하기 위해서다.
단연 돋보이는 건 노란 양 옆면에 각각 3개씩 붙은 다리 6개였다. 햇빛을 반사해 반짝이는 하얀 외피 속에 4개(앞다리는 7개)의 관절로 이뤄진 1.5m 길이의 알루미늄 다리가 숨겨져 있었다. 일반적으로 해저로봇은 프로펠러를 추진 수단으로 쓰는데, 조류가 강한 바다에서는 자세와 위치를 유지하기 힘들다는 단점이 있었다. 크랩스터는 6개의 다리를 이용해 마치 가재처럼 바닥에 밀착해 걷는 방법으로 이를 극복했다. 파도가 거친 지역이라도 바닥 근처의 '경계 영역'은 상대적으로 물살이 약하기 때문이다.
곧 각종 테스트가 이어졌다. 원격제어실 요원들과 크랩스터 앞에 선 연구원들이 무전기를 통해 실시간으로 소통했다. "앞 다리 먼저 볼게요." "잘 안 보입니다. 카메라에 뭐 묻었나 봐 주세요." "올 라이트 온, 올 라이트 오프(All lights on, all lights off)." 철제 바지선이 데워지면서 어느 순간 바지선 바닥에 고인 물 웅덩이에서 하얀 수증기가 피어나기 시작했다. 어느덧 2시간이 훌쩍 지나 있었다. 철저하고 꼼꼼한 준비였다. 드디어 준비 완료. 크레인이 크랩스터를 하늘 높이 번쩍 들었다. 6개의 다리를 몸 안 쪽으로 모은, 영락 없는 게의 모습이었다. 오전 11시, 드디어 크랩스터가 파란 바닷물 속으로 사라졌다.
크랩스터는 수중문화재를 찾아내고 직접 발굴도 할 수 있다
바다와 수중고고학, 그리고 첨단기술이 만나는 현장이다
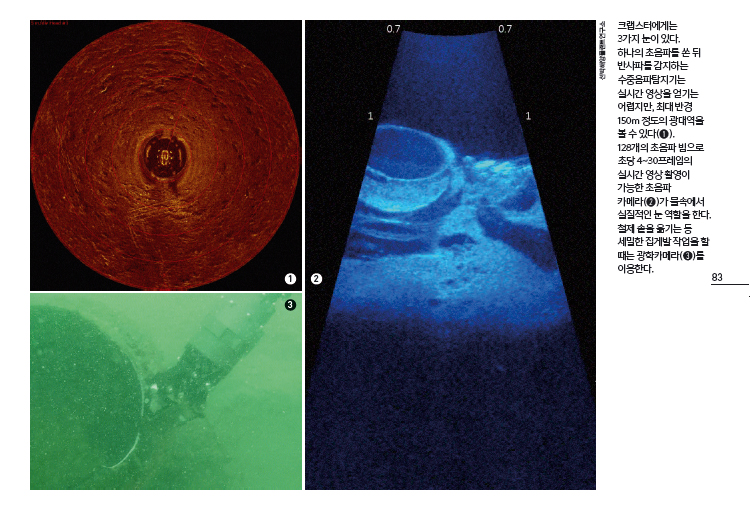
음파 이용해 탁한 바닷속 꿰뚫어 본다 이제 모든 건 원격제어실 요원들의 손에 달려 있었다. 광학카메라가 촬영해 보내오는 영상을 유심히 보던 유승열 연구원이 "이제 2.5m 내려갔을 뿐인데 벌써 바닥이 보인다"며 "시야가 어제보다 더 좋은 것 같다"고 들뜬 목소리로 말했다. 수심 4.2m 바닥에 닿았다. 수중음파탐지기를 담당하는 백혁 연구원이 "스캐닝 하겠다"고 전했다. 본격적인 탐사에 앞서, 초음파를 쏜 뒤 반사파를 감지해 최대 반지름 150m 주변의 해저 지도를 그리는 과정이다. 물속에서 10m 이상 나가지 못하는 빛을 대신해 크랩스터는 소리(음파)로 앞을 본다. 백 연구원이 이어 말했다. "6° 훌라후프 하겠습니다."
'훌라후프'는 수중음파탐지기가 360° 회전하면서 초음파를 쏠 때, 빔이 나가는 방향을 따라가며 몸을 구부리는 기능이다. 크랩스터가 마치 가상의 훌라후프를 돌리는 것 같다고 해서 이런 이름이 붙었다. 초음파가 수면에 반사돼 잡음이 생기는 걸 막는다. 멈춰선 상태에서 자세를 바꾸는 이 같은 기능은 본래 전복을 방지하기 위해 고안된 알고리듬이다. 전복을 막기 위해 크랩스터는 해저에 바짝 엎드려 걸을 뿐만 아니라, 발 끝에 있는 6개의 센서로 압력을 재고 머리 위에 달린 유속계로 물의 속도와 방향을 측정해 무게 중심이 몸 가운데에 올 수 있도록 자세를 고친다. 만약 더 이상 버틸 수 없을 때는 뒷걸음질 쳐서 중심을 잡는다.
하나의 해저 지형이 그려질 때마다 연구원들은 정용화 국립해양문화재연구소 수중발굴과 학예연구사와 논의를 거듭했다. 전봉환 실장은 "수중문화재 발굴을 오래 하신 분은 초음파 영상만으로 어떤 물체인지 단번에 안다"며 "우린 로봇을 잘 알고 고고학자들은 바다 사정과 문화재를 잘 알기 때문에 함께 연구해야 한다"고 말했다.
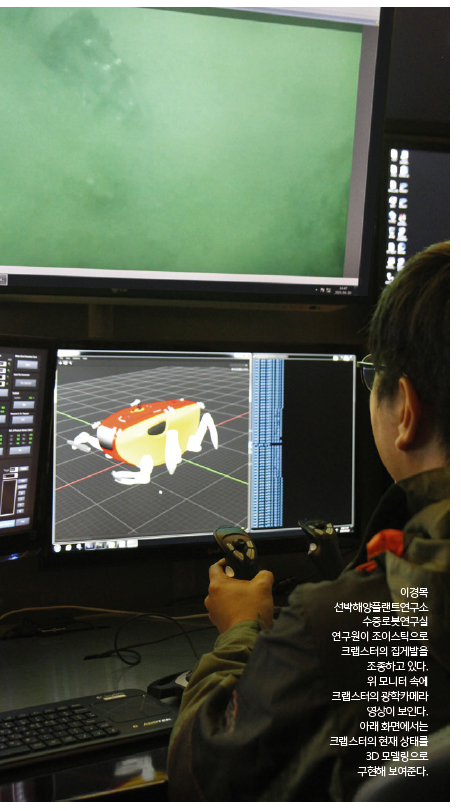
"스캐닝 결과, 전방으로 38m 가야 샘플이 나올 것으로 보입니다." 백 연구원의 말이 떨어지자 유승열 연구원이 지시를 내렸다. "바지선 기준 12시 방향으로 일단 5m 전진하겠습니다." 곧바로 이경목 연구원이 키보드를 눌러 크랩스터에 실제 명령을 내렸다. 오랫동안 함께 호흡을 맞춘 연구팀다웠다. 모니터 속 크랩스터가 걷기 시작했다. 제어를 위해 크랩스터의 현재 상태를 3D 모델링으로 재현한 영상이다. 그 때, 초음파 카메라를 담당하는 박진영 선임연구원이 말했다. "직진하면 통발입니다. 좌회전 해서 가시죠." 초음파 카메라는 수중음파탐지기와 원리가 같은데, 한 번에 128개의 초음파를 동시에 쏘기 때문에 실시간으로 구체적인 영상을 촬영하는 데 적합하다. 탁한 물 속에서는 실질적인 눈 역할을 한다. 진흙이 일고 컴컴한 해저에 납작하게 엎드린 채 머리 위로 흐르는 강한 물살로부터 몸을 피해 느리지만 정확하게 한 걸음씩 옮기는 크랩스터를 상상하자, 대견한 느낌이 밀려들었다.

도자기 건지고 헤엄치는 '팔방미인' 다리 스캐닝과 전진, 좌회전, 우회전, 그리고 다시 스캐닝이 반복됐다. 팽팽한 긴장감이 감도는, 출렁이는 바지선 위 좁고 어두운 원격제어실이 답답했다. 기다림이 길어지고 있었다. 그때였다. "앗, 저거 뭐죠?" 2시 6분, 드디어 초음파 카메라에 동그란 물체가 나타났다. 의자에 기대어 있던 박진영 연구원이 순간 등을 곧게 세웠다. 화면을 이리저리 돌려본 그는 "지름이 50cm 정도 되는 것 같다"고 했다. 정용화 학예연구사가 가까이 다가가 살폈다. "묻혔던 자국인가…. 아! 여기 솥뚜껑 손잡이가 보이네요. 저희가 1년 전에 묻어 둔 철제 솥 맞습니다!" 박수가 터졌다. 안도와 환희의 표정이 드러났다. 항구를 출발한 지 꼬박 6시간 만이었다.
크랩스터가 조금씩 철제 솥을 향해 다가갔다. 10여 분 뒤, 드디어 광학카메라 앞에 솥이 나타났다. 물속에서는 바로 1m 앞도 안 보이기 때문에 광학카메라는 주로 물체에 근접해 임무를 수행할 때 이용한다. 곧 모니터 양쪽에서 집게발이 나타났다. 앞다리 안쪽에 숨겨져 있던 것이다. 이경목 연구원이 굳은 얼굴로 조심스레 조이스틱을 잡았다. 15분 뒤, 엎어져 있던 솥이 뒤집혔다. 또 다시 힘찬 박수가 쏟아져 나왔다. 이후로도 크랩스터는 한참을 여기 저기 다니며 해저 지도를 그렸다. "오늘은 좀 멀리 나가 보려고요"라던 전봉환 실장은 오후 3시 30분, 바지선으로부터 크랩스터의 거리가 43m에 이르자 "실험을 시작한 이래 최대 탐색 거리에 최장 잠수 기록을 세웠다"며 그제야 환하게 웃었다. 오후 5시 15분, 약 6시간 동안 바다 속을 누빈 크랩스터가 물 밖으로 나왔다. 깨끗한 물로 씻긴 뒤, 격납고에 올렸다. 들어가기 전과 마찬가지로 각종 장비가 제대로 작동하는지 꼼꼼한 점검이 이어졌다.
크랩스터의 최종 목표는 마치 새우처럼, 걷기도 하고 헤엄도 치는 '복합이동'이다. 뻘처럼 무른 해저에서는 다리가 푹푹 빠져 걷기 어려울 수 있기 때문이다. 그래서 몇 년 전 개발 단계에서 비싼 제작 비용과 무거운 무게, 복잡한 설계, 쉽게 고장 날 위험 등을 무릅쓰고 각 다리에 관절 하나씩을 추가했다. 다리 외피도 원통형이 아닌, 복잡한 3차원 곡면으로 만들었다. 그야말로 우리나라 서해와 남해에 특화된 로봇이다. 실제로 크랩스터는 지난 달 처음으로 헤엄에 성공했다. 여섯 다리를 마치 노처럼 저었다. 해양공학수조에서 이뤄진 실험에서였다. 700kg에 달하는 몸을 밀어내는 모습에 연구팀이 기쁨을 감추지 못했다고 전봉환 실장은 전했다. 물속에서 모드 전환은 아직 어렵다. 크랩스터는 부력 탓에 수중 무게가 200kg으로 줄어드는데, 헤엄칠 때는 이의 4분의 1인 50kg 이하로 줄여야 한다. 이를 위해 현재는 크랩스터를 진수하기 전 사람 손으로 부력재를 붙인다. 그러나 수중 모드 전환은 시간 문제다. 전봉환 실장은 "부력조절장치를 탑재해 물 속에서 자유자재로 헤엄치다가 걷기도 하는 게 목표"라고 말했다.

"우리나라 수중과학 열 것"
다시 성원 3호를 타고 항구로 돌아오는 길, 탁하기만 한 서해 바다가 달리 보였다. 바다를 미지의 세계가 아닌 무한한 가능성의 보고로 보려는 연구팀의 염원이 담겨 있는 듯했다. 보물선이, 해양자원이, 신비한 생물이 몸을 깊숙이 숨기고 있는 어머니와 같은 바다였다.
다시 성원 3호를 타고 항구로 돌아오는 길, 탁하기만 한 서해 바다가 달리 보였다. 바다를 미지의 세계가 아닌 무한한 가능성의 보고로 보려는 연구팀의 염원이 담겨 있는 듯했다. 보물선이, 해양자원이, 신비한 생물이 몸을 깊숙이 숨기고 있는 어머니와 같은 바다였다.
전봉환 실장은 YTN 사이언스 '사과나무' 강연에서 말했다. "3차원 공간으로서 바다는, 지구에서 생명체가 살 수 있는 공간의 99%를 차지합니다. 발견된 생물은 140만 종인데, 아직 발견되지 않은 2000만 종이 바닷속에 있을 것으로 추산됩니다. 7800만km 떨어진 화성보다, 최대 깊이 11km에 불과한 해저에 대해 아는 게 더 없습니다. 이 세가지 이유 때문에 바다로 가야 하는 것 아닐까요."
기자가 태안을 떠난 뒤, 연구팀은 바지선을 마도에 더 가까운 곳으로 옮겼다. 수심이 더 깊고 유속이 더 빠른 지역에서 실험을 하기 위해서였다. 전 실장은 통화에서 "수심 20m까지 1m 간격으로 유속과 유향(물이 흐르는 방향)을 계측하는 데 성공했다"고 말했다. 크랩스터는 5월 14일, 30일로 예정된 실험을 마치고 대전 연구소로 돌아갔다. 그러나 곧 또다시 바다로 돌아올 터였다. 우리나라 수중과학의 미래를 열어갈 크랩스터의 선전을 기원한다.