지난 해 중국의 달 탐사선 ‘옥토끼’호가 착륙에 성공했다. 미국은 2020년까지 월면기지 건설을 추진하겠다고 발표했고, 일본은 2016년까지 무인 로봇을 보낸 후 2025년엔 달에 과학기지를 세울 계획이다. 우리나라도 질세라 2020년 달 궤도선과 달 착륙선을 쏘아 올린다고 발표했다. 새삼스럽게 사람들이 달에 도전하는 이유는 인류의 미래를 위한 ‘자원 찾기’란 의미가 크다. 달은 우주로 뻗어나갈 인간의 전진기지이기 때문이다.
NASA엔 ‘SCV 대회’가 있다
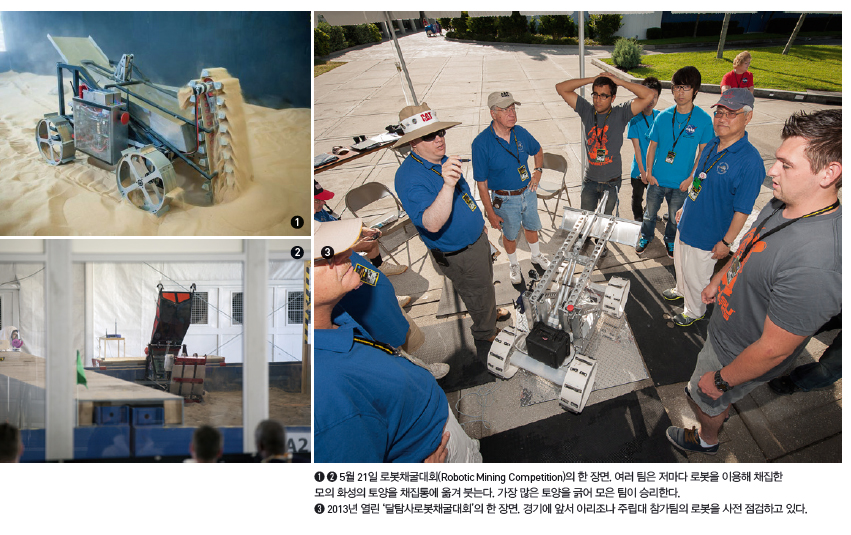
미국항공우주국(NASA)은 지난 5월 가상의 달 표면에서 자원 채취를 겨루는 ‘로봇채굴대회(Robotic Mining Competition)’를 개최했다. ‘스타크래프트’에서 광물과 가스를 채집하던 ‘SCV’와 비슷한 로봇을 만들어 실력을 겨루는 대회다. 올해가 5번째인 이 대회는 지난해까지 ‘달탐사로봇채굴대회(Lunabotics Mining Competition)’라는 이름으로 불렸다. 중력을 달과 비슷한 6분의 1 수준으로 낮춘 가상의 달 표면에 로봇을 투입해 제한된 시간 안에 얼마나 많은 흙을 실어 오느냐를 겨루는 경기다. 실제로 중력을 낮출 수는 없지만 토양의 성질을 이용해 비슷한 환경을 만든다. 로봇이 달이나 외계행성에 내려 앉을 때 얼마나 땅이 꺼질지 계산하고, 그만큼 고운 흙을 더 깔아주는 식이다. 우리나라에서는 2012년 대회에 이태식 한양대 토목공학과 교수팀이 한국생산기술연구원팀과 공동으로 참여한 바 있다.
이 대회는 올해 ‘화성’을 주 테마로 바꿨다. 중력을 화성처럼 지구의 1/3 정도로 맞췄고, 제한시간은 10분이었다. 이 안에 얼마나 많은 흙을 지정된 통에 옮겨 넣느냐가 승부의 관건이었다. 전 세계 36개 팀이 참여해 5월 19일부터 23일까지 5일간 열린 이 대회의 우승컵은 ‘알라바마대’와 ‘쉘톤주 커뮤니티 단과대’ 연합팀이 받아갔다. 참가한 로봇의 종류는 각양각색이다. 포클레인처럼 생긴 미니 로봇이 흙먼지를 일으키며 달려와 삽으로 흙을 퍼 담기도 하고, 캐터필러(무한궤도)형 바퀴에 바구니를 달고 바퀴를 계속 돌리며 흙을 퍼 담는 로봇도 있다. 드릴을 개조해 땅을 계속 파들어가며 흙을 위쪽으로 빨아올리는 로봇도 있었다.
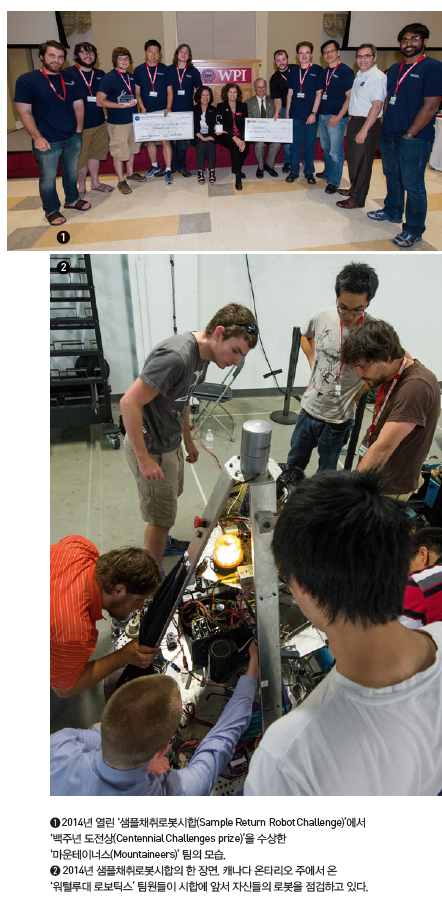
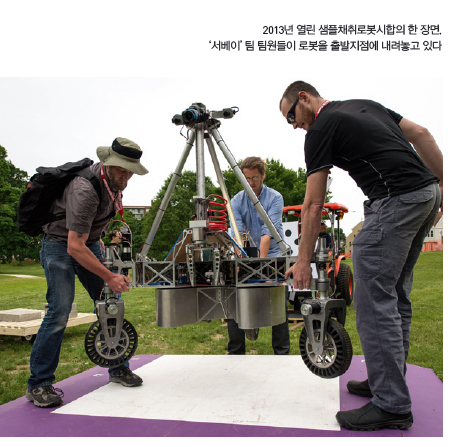
로봇 채굴대회가 실제로 외계 행성에서 토양을 퍼 올리는 기술을 겨루는 경기라면, 넓은 지역에서 얼마나 많은 광물 샘플을 캐오느냐를 겨루는 대회도 있다. 외계행성에서 ‘자율주행능력’을 확보하려는 목적이다. 장애물과 만나도 거침없이 넘어설 수 있는 구조, 목표물만 정해주면 로봇 스스로 움직이는 인공지능 제어기술 등이 관건이다. 역시 NASA에서 주관하는 대회로, ‘샘플채취로봇시합(RSS; Sample Return Robot Challenge)’이란 이름이 붙어 있다. 총 상금은 150만 달러(약 15억 원). 6월 11~13일까지, 3일간 미국 메사추세츠 주 워스터(Worcester, Massachusetts)에서 열린 이 대회는 세계 각국에서 18개 팀이 참여해 자웅을 겨뤘다.
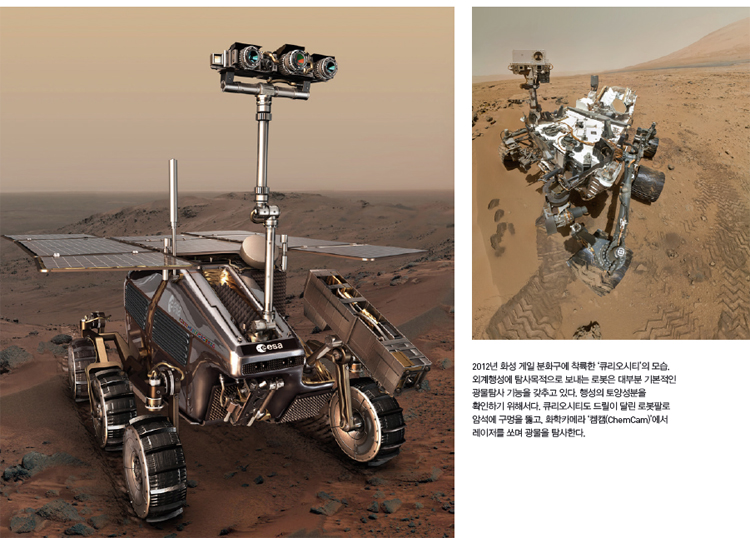
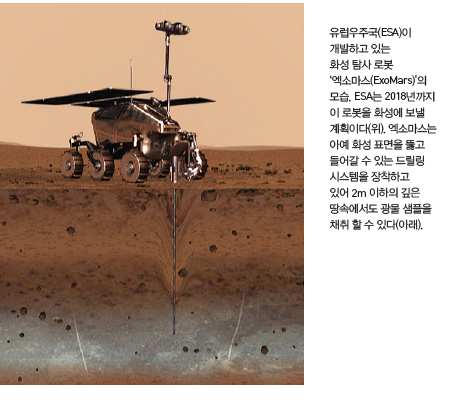
사실 이런 샘플채취 로봇은 이미 실용화 단계다. 2004년 화성에 도착해 10년째 탐사 활동을 벌이고 있는 NASA의 ‘오퍼튜니티’ 역시 샘플채취 기능을 갖고 있다. 오퍼튜니티는 어깨, 팔꿈치, 손목 등 관절 3개로 이뤄진 로봇팔로 토양을 채취해 화성에 적철석이 존재한다는 사실을 밝혀냈다. 2012년 화성 게일 분화구에 착륙한 ‘큐리오시티’도 마찬가지다. 드릴이 달린 로봇팔로 암석에 구멍을 뚫고, 화학카메라 ‘켐캠(ChemCam)’에서 레이저를 쏘며 광물을 탐사하고 있다. NASA는 더 먼 외계로 나갈 상황을 고려해 꾸준히 경진대회를 개최하며 아이디어를 모으고 있다. 유럽우주국(ESA)은 아예 화성 표면을 2m가량 뚫고 들어갈 수 있는 드릴링 시스템을 장착한 고성능 로봇 ‘엑소마스(ExoMars)’를 2018년 화성에 보낼 계획이다. 표면 위주로 이뤄졌던 화성탐사를 땅 속까지 확대하겠다는 것이다.

핵융합 원료 헬륨3 달에서 얻는다
외계는 그야말로 자원의 보고다. 가장 먼저 주목할 것은 역시 달이다. 달에 있는 티탄철석에는 일반 헬륨보다 중성자가 한 개 더 적은 ‘헬륨3’가 풍부한 것으로 알려져 있다. 이 자원은 미래의 핵융합발전소에서 원료로 쓸 수 있다. 핵융합 연료 1g은 석유 8t에 해당하는 에너지를 낼 수 있다. 지구에서 품귀현상을 겪고 있는 ‘희토류’도 달에는 무진장 널려 있다. 희토류는 고품질 반도체와 디스플레이의 재료로 쓰이는 광물로 중국 등 일부 국가에서만 생산되기 때문에 자원무기로까지 불린다. 이 밖에 우라늄과 티탄철석(일메나이트)도 막대한 양이 달에 묻혀 있다.
더 먼 외계행성에 가면 더 값비싼 희귀광물도 얻을 수 있다. 먼저 지구와의 충돌 위험으로 골칫덩이로만 여겨졌던 소행성에는 백금, 니켈 등 희귀금속이 대량 묻혀 있다. 미국의 우주벤처인 DSI는 지구에서 가까운 소행성 9500여 개 중 달보다 쉽게 광물을 얻을 수 있는 소행성이 1700개 정도라고 보고, 이런 소행성에서 우주 광산을 개발하겠다는 계획을 지난해 발표했다. 컴퓨터 크기의 소형탐사선 ‘반딧불(Firefly)’을 보내 샘플을 채취한 뒤 2016년 대형탐사선 ‘잠자리(Dragonfly)’를 보내 샘플을 지구로 가져와 성분을 분석해 본격적으로 우주광산 개발에 나선다는 것이다.
구글의 창업자인 래리 페이지와 영화 ‘아바타’의 제임스 캐머런 감독도 소행성의 광물을 채굴하기 위해 2012년 플래니터리 리소시스를 세우고 우주망원경 ‘아키드(Arkyd)-100’을 띄워 소행성을 탐사하겠다는 계획을 밝힌 바 있다. 우리나라도 한양대 연구팀이 2018년 NASA의 달 광물 탐사 계획인 ‘리소스 프로스펙터(Resource Prospector)’에 쓰일 시추장비 개발에 참여하고 있다. 이 계획에 따르면 탐사로봇은 일주일 동안 1km가량 이동하면서 1m 깊이에서 시료를 채취한 뒤 분석하게 된다. 이태식 한양대 교수는 “가까운 미래에 아예 달이나 화성 표면에 우주 광산을 개발하고, 그곳에서 나오는 광물을 이용해 현지에 우주 기지를 건설하는 날도 오게 될 것”이라고 말했다.

SCV의 기본조건=인공지능 갖춘 소형로봇
이렇게 채취한 우주자원은 채굴비용과 운송비까지 고려하면 현재로선 턱없이 비싸다. 운송료 때문이다. 상업화가 되지 않았으니 비용을 산정하긴 어렵지만, 개인인공위성 개발자 송호준 작가는 무게 1kg짜리 초소형 큐브위성 하나를 지구 궤도에 올려놓는데 1억 원이 넘는 돈을 냈다. 현재로선 달에서 암석 한 덩어리를 캐 오는 비용이 수억 원이 넘는다는 의미다. 더구나 애써서 달에서 헬륨3를 캐 오지 않더라도 헬륨3 대신 핵융합 원료로 쓸 수 있는 리튬과 중수소를 지구의 바닷속에서 얼마든지 뽑아낼 수 있다. 일부에서 우주광산 개발 노력에 회의적인 시각을 보이는 건 이 때문이다.
그러나 언젠가 지구 자원이 고갈될 상황에 대비하는 행성 채굴 기술은 반드시 확보해야 한다는 시각도 만만찮다. 이 기술은 인류가 먼 외계행성으로 진출하는 상황에도 대비할 수 있는데, 지구에서 모든 재료를 싣고 갈 수 없으니 새로 진출할 행성에서 자원을 채취해 기지와 공장 등을 건설하는 방법이 주를 이룰 것이다. 행성 채굴, 건설용 로봇은 인간에 앞서 외계행성을 개척하고 기지 등을 만들 선두주자라는 의미다.
 우주 SCV의 첫 번째 조건은 사람 없이도 임무를 수행하는 무인 자동화 기능이다. 지구 밖 행성이나 위성 중 사람이 살 수 있는 곳은 아직 단 한 곳도 없다. 달에는 공기가 없고, 화성도 대기압이 약 0.006기압으로 지구의 0.75%에 불과해 사실상 진공이나 마찬가지다. 이 때문에 로봇채굴대회도, 샘플채취로봇시합도 사람이 직접 조종하지 않는 무인 로봇을 이용하는 것이다. 특히 로봇채굴대회는 무선조종을 일부 허용한다. 채굴을 시작할 정도면 로봇을 조종할 사람들은 외계행성에 이미 도착했다고 보기 때문. 하지만 탐사가 주 목적인 샘플채취로봇시합은 대부분의 과정을 자율주행에 맡겨야 한다.
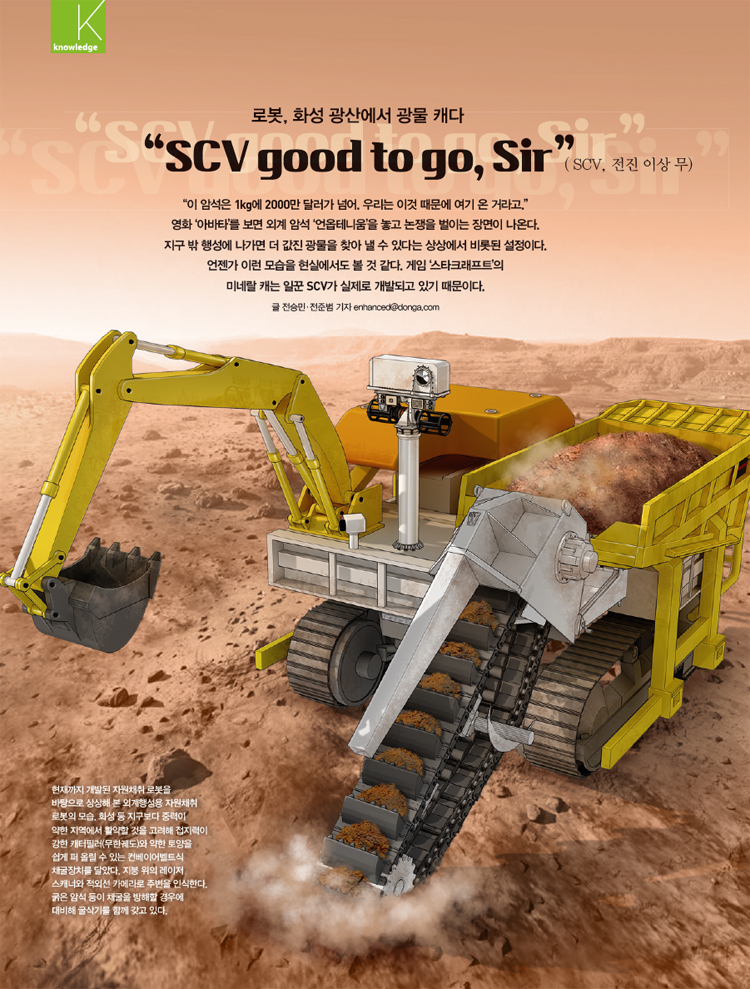
우주 SCV의 첫 번째 조건은 사람 없이도 임무를 수행하는 무인 자동화 기능이다. 지구 밖 행성이나 위성 중 사람이 살 수 있는 곳은 아직 단 한 곳도 없다. 달에는 공기가 없고, 화성도 대기압이 약 0.006기압으로 지구의 0.75%에 불과해 사실상 진공이나 마찬가지다. 이 때문에 로봇채굴대회도, 샘플채취로봇시합도 사람이 직접 조종하지 않는 무인 로봇을 이용하는 것이다. 특히 로봇채굴대회는 무선조종을 일부 허용한다. 채굴을 시작할 정도면 로봇을 조종할 사람들은 외계행성에 이미 도착했다고 보기 때문. 하지만 탐사가 주 목적인 샘플채취로봇시합은 대부분의 과정을 자율주행에 맡겨야 한다.채굴로봇의 형태도 지구의 건설장비와는 크게 달라진다. 산소가 거의 없는 환경이니 내연기관을 돌려 강한 힘을 얻는 ‘유압식 액추에이터(구동계)’는 포기하고 전기모터 방식에 의존해야 한다. 크기도 문제가 되는데, 지구에서는 굴삭기, 불도저 같은 대형 장비를 얼마든지 취급할 수 있지만 외계로 보내는 로봇은 최대한 가벼워야 한다. 또 행성의 중력과 토양에 맞춰 그때그때 설계를 변경해야 한다. 어느 행성에서나 활약할 수 있는 ‘만능로봇’은 만들기 어렵다는 의미다.
지구보다 중력이 약한 행성에서는 로봇 골격도 가늘고 날씬하게 만들 수 있다. 무게가 가벼워지면 마찰력도 줄어들기 때문에 지면에 잘 붙도록 캐터필러 형태의 바퀴를 달고 움직이는 편이 유리하다. 반대로 중력이 강한 곳에선 같은 크기의 로봇도 무게중심을 낮춰서 잘 넘어지지 않도록 설계해야 한다. 단단한 암석을 부수는 드릴 등 특수장비도 필요하다. 이동형태는 바퀴형이 더 유리한데, 캐터필러는 지형이 험난해도 잘 움직일 수 있지만, 저항이 커져 에너지를 많이 쓴다. 2015년도 NASA 샘플채취로봇대회 참가를 준비하고 있는 심현철 KAIST 항공우주공학과 교수는 “환경에 따라 로봇이 움직일 수 있는 적절한 구조를 설계해야 한다”며 “이런 로봇을 제어할 무인자동화기술 역시 연구해야 한다”고 말했다.