과학자들이 네발로봇을 개발하려는 이유는 간단하다. 말이나 당나귀처럼 무거운 짐을 싣고 사람을 따라다니는 ‘짐꾼’의 가치를 인정하기 때문이다. 바퀴를 단 자동차가 올라올 수 없는 험준한 산속도 로봇은 무거운 짐을 지고 불평 없이 따라온다. 군사, 탐사용 로봇으로는 최적이다.
발이 두 개든 네 개든 걸어 다니는 로봇을 만드는 건 어렵다. 하지만 둘 중 어느 쪽이 더 어렵냐고 물으면 대부분은 두발로봇이라고 답한다. 아무래도 네발이 더 안정적이고, 넘어지지 않을 것 같기 때문이다. 하지만 오히려 네발로봇이 더 만들기 어렵다. 로봇 휴보를 개발한 오준호 KAIST 기계공학과 교수는 “차라리 발이 6개 이상이면 균형을 잡기 더 편하다”면서 “걷는 로봇 중 가장 골치 아픈 것이 네발 로봇일 것”이라고 말한다.
네발로봇의 고민은 ‘중심 잡기’
걷는 로봇을 만들기 어려운 건 균형을 잡기가 어렵기 때문이다. 로봇은 신경망 시스템이 부족해 균형을 잡기 어렵기 때문에 발걸음을 옮길 때마다 ‘중심잡기’에 신경을 써야 한다. 사람의 걸음걸이를 생각해 보자. 다리가 두 개뿐이니 왼발을 들어 올렸을 때는 오른발로 땅을 딛고 서 있어야 하고, 오른발을 들어 올리려면 반대로 왼발은 땅을 딛고 있어야 한다. 예외는 없다. 보행 패턴도 차례차례 발을 옮기는 ‘걷기’와 중간에 두 발이 모두 공중에 떠 있는 ‘달리기’의 두 가지 뿐이다.
이 때문에 두발로봇은 보통 ‘한 발 안정화’라는 기술로 균형을 잡는다. 한 발을 들고 있을 때, 땅을 딛고 있는 한 발로만 오뚝이처럼 중심을 잡는 기술이다. ‘원 풋 스테빌리제이션’ 기술은 개발하기 어려운 기술이지만 일단 성공하면 어떻게든 한 발씩 걸음을 옮겨갈 수 있다. 하지만 네발동물은 보행패턴이 사람과 달리 4가지다. 로봇도 마찬가지인데, 승마에서 흔히 쓰는 용어인 평보, 구보, 속보, 습보다.
평보는 발 세 개를 땅에 붙여 두고 한 발씩 움직이는 것이다. 그런데 네발 동물이 발 하나를 들었을 때, 남아 있는 발 세 개의 위치를 선으로 연결해 보자. 삼각형을 그릴 수는 있지만, 안정적으로 중심을 잡을 수 있는 정삼각형 형태는 아니다. 그러니 들어 올린 발쪽으로 몸무게가 쏠려 넘어지기 마련이다. 넘어지지 않으려면 남아 있는 다리 세 개의 힘, 관절각도 등을 정밀하게 조절해 무게중심을 억지로 맞춰야 한다. 이 과정을 반복하면서 한 발, 한 발 움직여야 한다. 평지라면 모르겠지만 울퉁불퉁한 길, 언덕길 등에서 이런 보행알고리듬을 개발하는 건 그야말로 고역이다.
뒷다리와 앞다리를 엇갈려 내밀면서 빠르게 걷는 속보부터는 땅을 짚고 서 있는 다리가 세 개가 아니라 두 개다. 두 다리의 힘을 정밀하게 조종해 앞 쪽으로 무게중심을 넘겨, 쓰러뜨리듯 균형을 잡아야 한다. 그러니 평보보다 훨씬 무게중심을 잡기가 어렵다.
네 다리가 모두 공중에 뜨는 달리기 과정은 더 어렵다. 발 모양은 속보와 비슷하지만 네 다리가 모두 공중에 뜨는 시간이 있는 구보는 그야말로 고난이도 기술이다. 착지할 때마다 큰 충격이 전해지니 균형을 맞추기가 매우 까다롭다. 더구나 말이 전력질주 할 때처럼, 로봇이 뒷다리로 땅을 차면서 붕붕 계속해서 뛰어오르는 습보 과정을 개발하는 건 몇 년 전까지만 해도 거의 불가능한 기술이었다. 하지만 이런 네발로봇을 최근 여러 나라가 경쟁적으로 개발하고 있다. 발달한 로봇 기계기술과 정밀센서 덕분이다.

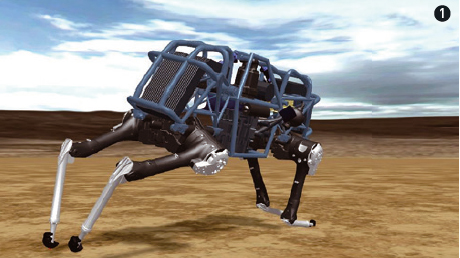
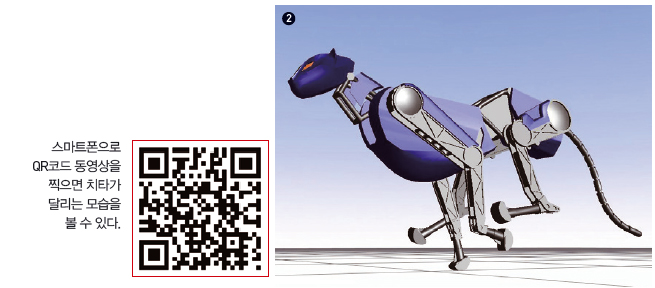
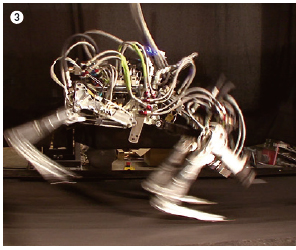
DARPA 지원으로 보스톤다이나믹스 사가 개발 중인 네발 로봇 치타. 아직 개발 중이지만 시속 약 47km의 속도를 낼 수 있으며, 구보, 습보 형태로 뛸 수 있다. 다만 아직 안정성에 문제가 있어 보조장치를 달아야만 뛸 수 있다. DARPA는 미국 MIT에도 연구비를 지원해 달리기가 가능한 네발로봇을 개발하고 있으며, 여기에는 우리나라 서강대 팀도 참여하고 있다. ➊과 ➋는 치타의 달리기 모습을 나타낸 모식도. ➌은 개발 중인 치타의 실제 달리기 모습.
한국형 네발로봇 ‘진풍’의 모습. 진풍은 여러 면에서 빅독과 닮았지만 모든 설계와 구동 장치 제작을 한국생산기술연구원이 전담한 토종 로봇이다.
얼음판 걷는 美 ‘알파독’, 힘센 韓 ‘진풍’
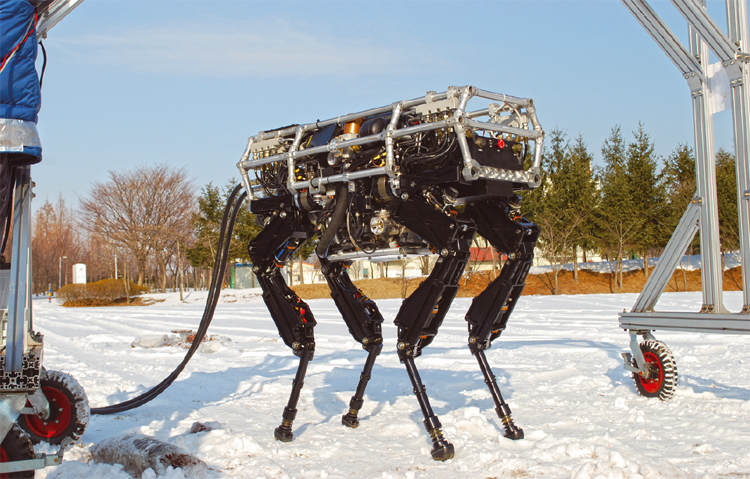
네발로봇 개발에 가장 먼저 뛰어든 나라는 미국인데, 미국 방위산업체 보스턴다이내믹스의 ‘빅독’이 첫 작품이다. 아마 과학동아 독자라면 유튜브 사이트에 올라온 빅독의 실험 동영상을 본 사람이 있을 것이다. 구보나 습보로 걷지는 못하지만 마치 살아있는 당나귀처럼 균형을 잡아 많은 사람을 놀라게 했다.
빅독은 특히 뛰어난 균형감각이 자랑이다. 걸어가는 도중에 옆에서 힘껏 발로 걷어차도 넘어지지 않고, 얼음판 위에서 미끄러져도 다리를 바꿔 디디면서 다시금 중심을 잡아낸다. 두발로봇으로는 거의 불가능한 기술이다. 보스턴다이내믹스는 최근 성능을 더 높인 ‘알파독’을 개발하고 있다.
우리나라에도 이런 네발로봇이 있다. 한국생산기술연구원 실용로봇연구그룹은 2008년 네발로봇 ‘진풍’을 개발했다. 당시에는 초보적인 걸음걸이에 그쳤지만 지금은 중심잡기 기능이 실용화 가능한 수준으로 개발됐다. 진풍은 키 120cm, 무게 120kg으로 최대 시속 4∼5km의 속도를 낼 수 있다. 60kg이 넘는 짐을 싣고 스키장의 상급자 슬로프에 해당하는 30도 경사를 걸어 올라갈 수 있다. 조정산 보행로 봇팀장은 “가솔린 엔진과 유압식 실린더를 이용해 움직이기 때문에 전기모터 방식보다 힘이 세고 동작이 자연스럽다”고 말했다. 한편 이탈리아 IIT연구소도 ‘하이큐(HyQ)’라는 소형 네발로봇을 개발하고 있다. 중국도 비슷한 성능을 가진 네발로봇을 연구하고 있다.
미국의 빅독과 우리나라 진풍은 평보와 속보 형태를 바꿔가면서 걸을 수 있지만 아직 구보나 습보 형태로 뛰진 못한다. 미국 국방성 고등연구계획국(DARPA)이 지원하고, 보스턴다이나믹스와 MIT, 우리나라의 서강대 연구팀이 참여하고 있는 ‘치타(Cheetah)’ 프로젝트에서는 본격적으로 네 발로 뛰는 로봇을 개발하고 있다. 최근 서강대 팀은 국산로봇 치타로이드(Cheetaroid)를 선보이기도 했다. 이 프로젝트에서 나온 로봇들은 제한적인 조건에서는 구보, 습보 형태의 달리기가 가능한 것으로 알려져 있다.
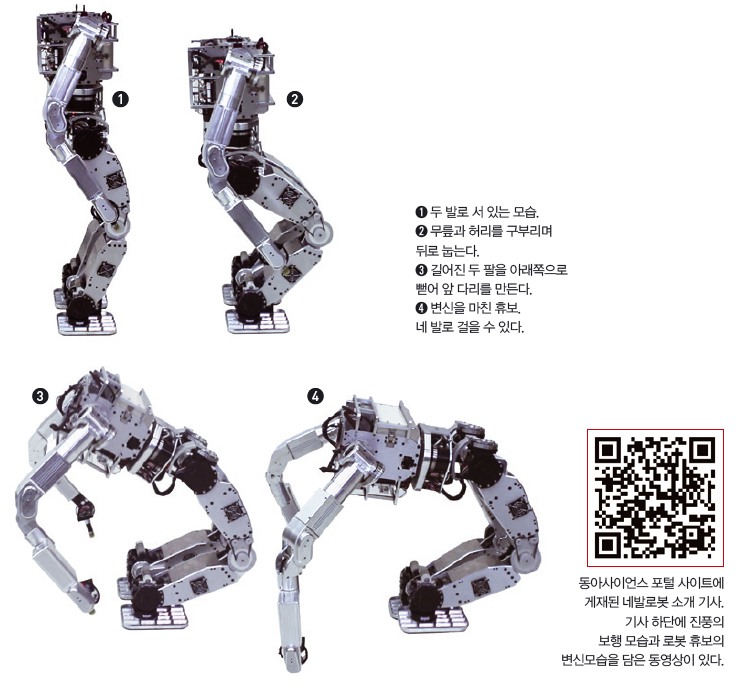
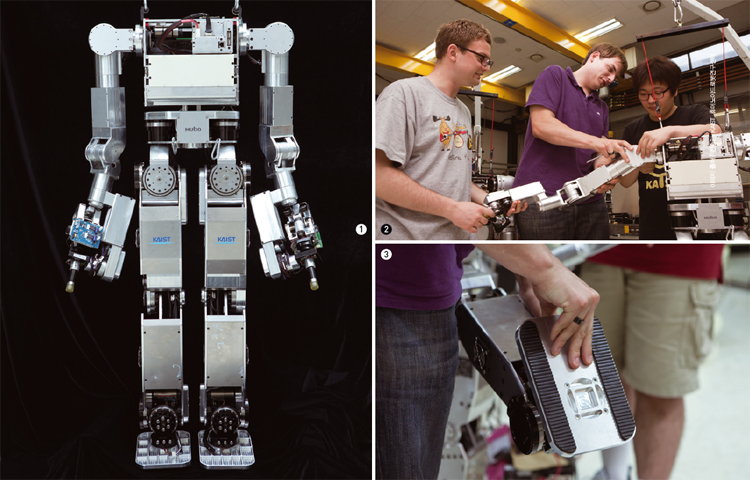
➊ 두발로봇 휴보를 개조한 ‘DRC휴보’의 모습. 네발로봇으로 변신할 수 있는 기능을 갖고 있다.
➋ 대전 KAIST 휴머노이드로봇 연구센터에서 DRC휴보를 조립하고 있는 팀원들. DRC휴보 몸체는 KAIST 오준호 교수팀이 개발했지만 운영 소프트웨어 등은 미국 7개 대학 연구팀이 공동으로 개발하고 있다.
➌ DRC휴보의 발. 미끄러지지 않는 요철구조로 돼 있다. 두발로봇은 한 발로 중심을 잡기 때문에 발바닥의 형태도 안정성에 큰 영향을 미친다.
휴보는 두 발에서 네 발로 ‘변신’
두발로봇 휴보도 최근 네발 보행 기능을 추가했다. 팔을 등 뒤로 돌린 후 뒤로 누우면서 네발로봇으로 바뀌는 ‘DRC휴보’가 그것이다. DRC휴보의 네발걷기 기술은 안정성을 최우선으로 두고 있다. 울퉁불퉁한 길에서도 넘어지지 않겠다는 것이다. DRC휴보 개발을 맡고 있는 김인혁 KAIST 연구원은 “DRC휴보는 기본적으로 인간형 두발로봇이기 때문에 본격적인 네발로봇에 비하면 성능이 떨어진다”며 “아직 연구개발 단계지만 평보 형태를 기본으로 한 뒤 필요하면 속보 기능도 추가할 생각”이라고 말했다.
휴보팀은 이 로봇으로 DARPA의 ‘재난구조로봇 경진대회(DARPA Robotics Challenge)’ 1차 심사 결과 최종본선에 오른 6개 팀에 선정됐다. 본격적인 경진대회는 올해 12월에 열린다. 모의 원전사고 현장으로 들어가 밸브를 잠그고 나오는 과제를 해결해야 하는 이 대회는 200만 달러(약 22억8000만 원)의 상금이 걸려 있다(과학동아 7월호 ‘세계 최고 재난구조로봇 뽑는다’ 기사 참조).

본선에 진출한 첫 번째 한국팀은 KAIST 휴머노이드로봇 연구센터다. 미국 드렉셀대 연구팀과 공동으로 한국 최초의 두발로봇 휴보를 업그레이드 한 ‘DRC 휴보’를 내세워 최종 결선에 올랐다. 더 세진 힘과 튼튼해진 몸체, 새롭게 추가한 네발로봇 변신기능이 특징이다.
한국기업 로보티즈도 미국 버지니아공대 로봇기계연구소(RoMeLa)와 함께 결선 진출에 성공했다. 로보티즈가 개발한 ‘토르OP(한국명 똘망)’는 버지니아공대를 이끄는 한국계 미국인 데니스 홍 교수의 플랫폼으로 쓰이고 있다. OP는 오픈플랫폼의 약자로, 12월 최종결선에 똘망을 쓸지, 똘망을 업그레이드 한 새로운 로봇이 투입될지는 결정되지 않았다. 똘망은 전기모터와 감속기(자동차의 변속기와 같은 힘 조절 장치)를 하나의 모듈로 묶는 개방형 구조다.
이밖에 최종 경합에 오른 팀은 ▲로봇 침프(CHIMP)를 내세운 카네기 멜론대 팀 ▲네발로 엉금엉금 기는 ‘로보시미안(RoboSimian)’을 선보인 미국항공우주국(NASA) 제트추진연구소 ▲로봇 ’발키리(Valkyrie)’를 내세운 NASA 존슨우주센터 ▲일본의 산업용 두발 로봇을 개조해 재난구조용 로봇 스차프트(SCHAFT)를 개발하고 있는 기업 스차프트가 꼽혔다.
DARPA 측은 7월 11일(현지시간) “중간 심사결과에 따라 2개 팀을 떨어뜨리고 최종 5개 팀을 선정하려고 했으나, 참가팀들의 우열을 가리기 어려워 6개 팀을 선정했다”고 밝혔다. DARPA는 지난해 서류심사를 통해 세계 로봇연구팀 중 최고 고수 7팀을 선발했다. 이 7개 팀은 180만 달러(약 21억 원)의 연구비를 받고 그동안 재난구조로봇을 개발해 왔다. 이번 중간점검에 합격한 6개 팀은 120만 달러(약 13억 원)의 연구비를 추가로 받고, 올해 말 최종 경합에 진출하게 된다.