2000년 일본에서 인간형 로봇 ‘아시모’ (Asimo)가 처음 등장했을 때 세상은 경악했다. 두 발을 가진 아시모는 걸음걸이가 이전과는 비교할 수 없을 정도로 부드러워 마치 살아 있는 인간처럼 보였다. 아톰이 걸어나오는 듯했다. 아시모는 2002년 연봉 2억원을 받고 도쿄에 있는 일본과학관의 안내원을 맡는 등 지금도 곳곳에서 인기를 모으고 있다.
이제 한국에서도 아시모에 견줄만한 인간형 로봇(휴머노이드)이 탄생을 앞두고 있다. 한국과학기술원(KAIST) 오준호 교수팀(기계공학과)이 개발한 ‘KHR-2’ 가 그 주인공이다. 이 로봇은 마무리 작업을 마친 뒤 오는 12월 공식 발표될 예정이다.
키 1백20cm 한국의 ‘아톰’
이 로봇의 키는 1백20cm. 몸무게는 54kg이다. 사람처럼 다리도 2개, 팔도 2개다. 손가락도 5개다. 가슴과 배도 있고 머리도 달려 있다. 머리 안에는 사람의 눈처럼 카메라도 있다. 오 교수는 ‘KHR-2’ 라는 임시 이름 대신 12월까지 로봇에 어울리는 근사한 이름을 지을 생각이다. KHR은 ‘KAIST Humanoid Robot’ 의 약자다.
특히 이 로봇은 키가 일본의 아시모와 똑같다. 오준호 교수는 1백20cm가 두 발을 가진 인간형 로봇의 표준키라고 말한다.
“인간처럼 두 발을 가진 로봇은 크게 2종류로 나뉩니다. 하나는 60cm 크기의 장난감 로봇, 다른 것은 1백20cm 크기의 휴머노이드입니다. 장난감 로봇은 두 발로 걷기는 해도 무게도 가볍고 중심 잡기도 쉽습니다. 그러나 1백20cm 크기의 휴머노이드는 무거운 데다 덩치도 커서 중심도 잡고 발맞춰 움직이게 하기가 매우 어렵습니다.”
두 발로 걷는 휴머노이드는 ‘로봇의 꽃’ 으로 불린다. 인간과 닮아 신기한데다 두 발로 넘어지지 않도록 자세를 잡고 자연스럽게 앞뒤로 걸으려면 걷는 동작 하나하나를 미세하게 제어해야 해 매우 어렵기 때문이다. 실제로 두 발로 걷는 로봇은 세상에 많지 않다. 대부분의 로봇은 고정돼 있거나 바퀴 또는 여러개의 다리로 움직인다. 두 발로 잘 걷는 로봇을 만드는 연구소는 최고의 로봇 연구소로 대접을 받는다.
왜 오 교수는 그 어렵다는 두 발 로봇을 개발했을까.
“두 발 로봇을 개발하는 것은 평생의 꿈이었습니다. KAIST에 교수로 부임한 뒤 89년 한국에서 처음으로 네 발 로봇을 개발하는 등 로봇 연구에 푹 빠졌죠. 문제는 예산이었는데 KAIST 인간친화복지로봇 연구센터에서 3년 전부터 지원을 받아 두 발 로봇 개발을 시작했습니다. 이왕 시작한 거 처음부터 아시모를 목표로 잡았죠.”
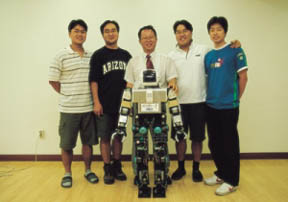
이 로봇을 개발하고 있는 김정엽씨(박사과정)는 KAIST 연구실을 찾아간 기자 앞에서 직접 로봇을 시연해 보여줬다. 쇠로 된 틀에 마치 죽은 듯 매달려 있던 로봇은 전원을 연결하고 스위치를 넣자 컴퓨터가 켜지듯 불빛이 반짝거렸다.
오 교수는 “로봇을 홀로 바닥에 세우기 전에 10여분 정도 줄에 매달아 아주 편평한 바닥에 세워둬야 한다”며 “로봇이 중력에 새로 적응하는 중”이라고 설명했다. 편평한 곳에 적응하면 편평한 곳에서 잘 움직이고 경사진 곳에 처음 놔두면 경사진 곳에서 잘 적응한다. 로봇 안에는 펜티엄4 칩이 들어 있다. 로봇의 뇌다.
마침내 김정엽 씨가 로봇에 매달려 있던 줄을 풀었다. 로봇은 바닥에 홀로 서 있었다. 그가 컴퓨터로 뭔가를 입력하자 “윙” 소리를 내며 마침내 로봇이 움직이기 시작했다. 왼발을 살짝 들어올린 뒤 앞으로 내딛고 다시 오른발을 들어올려 왼발 위치에 나란히 놓았다. 그런 방식으로 KHR-2는 천천히 앞으로 걷기 시작했다. 영화에서 보았던 어색하고 딱딱한 로봇의 걸음걸이가 아니라 사람처럼 부드러운 움직임이었다.
기자 앞까지 온 로봇은 뒷걸음질을 쳐 원래 위치로 되돌아갔다. 게처럼 옆으로 걷거나 제자리에서 좌향좌 우향우 하듯 몸을 돌리기도 하고 빙글빙글 돌기도 했다.
걷기를 마친 로봇은 애교까지 부렸다. 기자에게 팔을 흔들어 인사도 하고 오 교수와 악수도 했다. 팔을 양쪽으로 벌리며 체조를 하는 모습도 보여줬다. 지금은 전선이나 기계 부품이 바깥으로 드러나 있지만 12월까지 아시모처럼 맵시 있는 껍데기로 감싸면 훨씬 더 귀엽게 보일 터였다.
김정엽 씨가 붉은 빛이 나는 손전등을 하나 가져왔다. 로봇 앞에 손전등을 갖다 대자 로봇의 얼굴이 빛이 나는 곳으로 움직였다. 손전등을 뒤로 빼자 로봇이 다가왔고 앞으로 갖다 대자 뒤로 물러섰다.
오 교수는 “앞으로 음성인식 기능과 얼굴 인식 기능을 넣어 말로 움직이거나 친한 사람의 말만 들을 수 있도록 만들 것”이라고 말했다. 다만 로봇은 “윙”하는 모터소리 때문에 움직이는 내내 시끄러웠다. 아시모는 조금 더 조용하다고 한다. KHR-2는 배터리로 움직이는데 한번 충전하면 1시간 정도 움직인다. 걷는 속도는 시속 1km 정도로 매우 느리다.
2년 안에 일본 따라잡겠다

“이 로봇이 아시모보다 더 뛰어납니까?”
기자가 오 교수에게 물었다. 그는 고개를 저었다.
“아시모는 세계 최고의 두 발 달린 인간형 로봇입니다. 인간형 로봇에서 현재 가장 중요한 기술은 얼마나 부드럽게 걷느냐는 것입니다. 그 점에서 아시모를 따라잡을 로봇은 아직 없습니다. 아시모가 90점이라면 우리 로봇은 70점으로 볼 수 있습니다.”
현재 아시모는 몸무게가 52kg으로 2000년 나온 것보다 9kg이나 늘었다. 인공지능이 업그레이드되면서 부가 장치들이 붙었기 때문이다. 덕분에 아시모는 사람이 다가서면 인사하고 사람을 따라다니기도 하며 간단한 말까지 나눈다.
그러나 오 교수는 2-3년 안에 아시모를 비롯해 일본의 인간형 로봇을 따라잡을 수 있다고 자신했다. 그는 “일본 혼다사가 아시모를 개발하기 위해 쏟은 돈만 수백억원이 넘는다”며 “이 로봇은 3년 동안 겨우 몇 억원을 투자해 개발한 것”이라고 말했다.
또 아시모나 외국의 다른 인간형 로봇이 수많은 박사급 연구원들이 매달려 이뤄낸 결과지만 한국의 두 발 로봇은 오 교수와 김정엽 씨를 포함해 실험실에 있는 몇명의 학생들이 이뤄낸 쾌거라고 강조했다. 앞으로 좀더 투자를 받으면 획기적인 발전을 이뤄낼 것이라고 장담했다. 그는 과학기술부, 산업자원부, 정보통신부가 공동으로 이 로봇에 투자할 계획을 세우고 있다고 귀뜸했다.
일본의 인간형 로봇을 제외하면 이 로봇은 세계의 웬만한 두 발 로봇을 앞선다. 오 교수는 “독일 등의 한두개 로봇이 우리와 비슷한 70점이라면 나머지는 10점, 20점 수준”이라고 잘라 말했다.
KHR-2가 아시모보다 앞선 점도 있다. 아시모 안에 들어 있는 모터는 모두 26개다. KHR-2에는 41개가 들어 있다. 모터가 많으면 그만큼 다양한 동작을 할 수 있다. 한 예로 아시모는 손가락 5개가 한꺼번에 움직인다. 그러나 이 로봇은 손가락을 각각 움직일 수 있다. 가위바위보 놀이도 할 수 있고 먼 곳을 가리키거나 승리의 V자를 손가락으로 나타낼 수도 있다. 눈동자가 각각 움직이거나 몸통을 돌릴 수 있는 것도 이 로봇의 장점이다.
전시회에서 두 발 로봇이 나오면 관람객들은 로봇의 다양한 동작에 환호한다. 그러나 과학자의 눈은 다르다. 그들이 보는 것은 두 다리다.
“사실 휴머노이드의 허리 윗부분은 폼입니다. 사람처럼 보이기 위해 그냥 달아 놓은 것이죠. 휴머노이드의 핵심은 두 다리를 이용해 얼마나 안정적으로 자연스럽게 걷는냐는 것입니다. 아시모도 옆에서 가볍게 툭 치면 바로 쓰러집니다.”
오 교수는 로봇의 뼈대를 만드는 것은 어렵지 않았다고 말한다. 문제는 로봇을 움직이게 만드는 프로그램 즉 소프트웨어다. 두 다리를 차례차례 이동하고 이에 맞춰 무게 중심을 옮겨야 한다. 사람은 이 동작이 의식하지 않아도 자연스럽게 되지만 로봇은 하나하나 정보를 넣어줘야 한다.
사람 걸음 흉내 어려워
“사람이 걷는 모든 동작을 저속 카메라로 찍은 뒤 ‘모션 캡처’ (motion capture)라는 기능을 이용해 움직이는 동작 하나하나를 뽑아내 로봇에 입력합니다. 발을 얼마나 내딛어야 하는지 그때 팔은 어떻게 하고 몸통은 어떻게 움직여야 하는지 모든 정보를 집어넣습니다. 사실 이런 작업은 시작에 불과합니다.”
오 교수는 사람이 걷는 것이 이렇게 힘든 줄 몰랐다고 털어놓았다. 사람은 편하게 걸어 다니는 것이 자연스럽지만 로봇은 차렷 자세로 뻣뻣하게 서있는 것이 가장 자연스럽다. 사람은 머리를 흔들어도 초점이 흔들리지 않지만 카메라는 조금만 흔들려도 상이 흐릿해진다. 인간에게는 고통이 로봇에게는 편안함이고 거꾸로도 마찬가지다.
“별 짓 다 해봤습니다. 사람 손을 묶어놓고 걷게 해 발 움직임이 어떻게 달라지는지 분석도 했습니다. 3년 동안 저와 학생들은 추석도 설날도 없이 살았죠. 아기가 걸음마를 떼듯 이 로봇도 수없이 넘어지면서 걸음마를 배우는 중입니다.”
김정엽씨는 “걷는 프로그램을 만든 뒤 오류를 고치는 작업이 가장 어려웠다”고 말했다. 처음에는 로봇이 걷다가 갑자기 다리를 쭉 뻗거나 고개를 옆으로 돌리고 허리를 비트는 일이 잦았다. 하나하나가 모두 고쳐야 할 문제였지만 왜 그런지 도대체 어느 부분에 문제가 있는 것인지 알 수 없었다. 어떤 문제는 한달 넘게 해결되지 않았다. 그럴 때는 잠도 제대로 오지 않았다. 김정엽 씨는 “그래도 로봇이 처음 걸었을 때 희열을 잊을 수 없다”고 말했다. 그 맛에 밤새 연구하는 것이 아닐까.
인간 닮은 로봇은 꿈을 준다
사실 로봇이 꼭 인간의 모습을 닮을 필요는 없다. 두 다리로 걷든 네 다리로 걷든 똑똑하고 일만 잘하면 그만이다. 예를 들어 KAIST 양현승 교수팀이 개발해 유명해진 ‘아미’ 는 얼굴은 사람과 닮았고 팔도 있지만 바퀴로 움직인다. 몸통도 ‘로봇처럼’ 생겼다. 그러나 뛰어난 인공지능으로 사람들을 즐겁게 한다. 산업 현장의 로봇은 머리도 없이 팔 하나만 있다. 최근 보급되고 있는 가정용 로봇은 원반 형태의 청소로봇을 비롯해 바퀴로 움직이는 개 모양의 경비 로봇 등 사람 모양과는 거리가 멀다. 사람 모양의 로봇은 기능면에서는 쓸모가 적기 때문이다.
“인간형 로봇은 오락적인 면 외에는 앞으로 20년 안에는 별 쓸모가 없을 겁니다. 그런데 왜 과학자들이 인간형 로봇을 개발하는지 아세요?”
오 교수가 기자에게 물었다. 기자가 머뭇거리자 오 교수는 “호기심”이라고 강조했다. 오 교수는 인간형 로봇의 개발 목적이 2가지라고 말했다. 하나는 사람을 즐겁게 하기 위해서다. 사람과 꼭 닮은 로봇을 보는 것이 신기하고 즐겁다는 것이다. 꿈을 꾸게 해주는 셈이다.
또 하나는 인간형 로봇을 통해 어떤 나라나 기업의 기술력을 과시하려는 목적이 있다고 한다. 일본 혼다사가 당장은 별 쓸모 없는 아시모를 만든 이유도 ‘혼다=첨단 기업’ 이라는 일종의 브랜드 마케팅이라는 것이다(국내 최고의 기업으로 꼽히는 삼성전자가 로봇을 이용해 비슷한 브랜드 마케팅을 할 수 없을까라는 생각이 들었다).
사람과 공존하는 휴머노이드가 목표
오 교수는 두 발로 걷는 인간형 로봇이 앞으로 몇 가지 장벽을 뛰어넘어야 한다고 강조했다.
가장 중요한 것이 ‘안정된 걸음걸이’ 다. 아시모든 KHR-2든 옆에서 툭 치면 금방 쓰러진다. 걸음걸이가 다양한 형태로 안정되게 유지돼야 진짜 인간의 모습이 될 수 있다. 급한 경사나 계단도 오르내리고 등산도 하고 잔디밭에서는 조심조심 걸어야 진짜 인간형 로봇이다.
‘실용성’ 도 문제다. 오 교수는 “휴머노이드가 사람을 업고 돌아다니거나 짐을 질 수 있다면 얼마나 편하겠느냐”고 반문했다. 그러나 인간형 로봇은 몸이 약해 그런 일을 견딜 수 없다. 팔 힘도 약해 무거운 것은 제대로 들 수 없다.
오 교수는 “작지만 지금보다 월등히 강한 모터, 가벼우면서도 탄탄한 뼈대 등이 필요하다”고 설명했다. 한번 충전해 반나절은 움직일 수 있는 배터리도 나와야 한다.
그는 3년 전 인간형 로봇 연구에 뛰어들면서 이론보다는 직관으로 문제를 해결했다고 말했다. 학생들이 외국 논문을 들이대며 이론적으로 이런 기술이 불가능하다고 하면 그는 학생 앞에서 논문을 찢어버렸다고 한다. 그들에게 직접 해보기 전에는 모른다고 강조했다. 그리고 학생들과 같이 실험실에서 팔을 걷어 붙이고 도전했다.
“휴머노이드의 궁극적인 목표는 사람과 공존하는 겁니다. 제가 만들려고 하는 것도 사람의 친구가 되는 로봇입니다. 우리와 비슷하게 생겨야 정이 가지 않겠습니까. 영화처럼 휴머노이드가 사람을 해치는 일은 절대 일어나지 않을 테니 안심하세요.”
1973년 첫 휴머노이드 일본서 등장

인간형 로봇의 역사는 인간의 역사와 맞물려 있다. 세계의 온갖 신화에는 인간을 닮은 거대한 물체가 종종 나온다. 중세시대 때도 인간의 모습을 하고 기계장치로 움직이는 인형이 많이 만들어졌다. 현대에 와서 영화와 만화에 수많은 인간형 로봇이 등장했다.
제대로 된 인간형 로봇의 역사는 일본 와세다대 가토 이치로 교수팀이 1973년 개발한 ‘와봇’ (WABOT-1)부터 시작된다. 두 발로 걷는 최초의 로봇이었다. 그러나 당시 만들어진 로봇들은 디자인도 엉성하고 외부 장치가 더덕더덕 붙어있어 인간처럼 보이지는 않았다.
1996년 혼다사가 ‘P2’ 라는 로봇을 선보이면서 인간형 로봇의 역사에 일대 혁신이 일어났다. 배터리가 내장된 키 1백80cm 크기의 P2는 이전 로봇과는 비교할 수 없는 부드러운 걸음걸이로 세계 로봇 학자들에게 충격을 줬다. 기자도 당시 만났던 여러 로봇 학자로부터 P2에 대해 감탄하는 말을 들었다. 당시 일본 로봇학계에서는 P2 로봇의 출현을 놓고 “5년 안에 휴머노이드의 세상이 온다”고 떠들었다. 이후 P3를 거쳐 2000년 아시모가 탄생했다.
또다른 인기 휴머노이드는 소니사가 개발한 ‘큐리오’ 다. 60cm 크기의 장난감 로봇인 큐리오는 넘어져도 손을 잡고 일어서는가 하면 흔들리는 스노보드 위에서도 중심을 잡고 서있을 수 있다. 큐리오는 올해 3월 다섯 손가락을 능숙하게 쓰며 트럼펫을 불어 사람들을 놀래켰다.
휴머노이드개발의 원조인 와세다대에서도 꾸준히 인간형 로봇이 나오고 있다. 이곳에서 개발된 ‘WF-4’ 는 키 2백50cm에 몸무게가 1백kg이나 나가며 플루트를 연주한다. ‘로비수케’ (ROBISUKE)는 인간과 대화하는 로봇으로 얼굴과 목소리, 행동을 인식하는 눈을 갖고 있고 자연스럽게 팔까지 흔들며 이야기를 나눈다. 여러 사람과 함께 대화할 때는 말하는 사람의 얼굴을 일일이 바라본다. ‘WE-4R’ 은 눈 입술 턱 등 얼굴에 있는 29개의 모터를 움직여 즐거움, 분노, 놀람, 슬픔, 공포, 미움 등 6가지 감정을 표현한다. 인간형 로봇은 주로 일본에서 연구가 활발하다.