헬리콥터는 수직 이착륙이 가능하고, 제트기는 고속비행 능력이 있다. 두가지 능력을 모두 가진 신개념 비행체는 없을까. 헬기처럼 떠서 제트기처럼 전진하는 새로운 비행체는 어떤 모습일까

그리 넓지 않은 주차장 정도의 공간에서 자그마한 비행체 한대가 야간에 이륙한다. 놀랍게도 사람이 타지 않은 무인기다. 목표는 2백km나 떨어져 있는 수상한 함선. 무인기는 매우 빠른 속도로 함선에 접근한다. 임무는 실시간으로 함선 근처에서 일어나고 있는 상황을 모니터해 현장의 자료를 여러 곳에 제공하는 것. 무인기는 서너시간 동안 자신의 임무를 완수한 후 뒷마당에 돌아와 스스로 착륙한다.
비행체가 이같은 임무를 수행하기 위해서는 흔히 접할 수 있는 항공기와 다른 두가지 능력을 동시에 지녀야 한다. 좁은 공간에서 뜨고 내리려면 수직으로 이착륙하는 능력이 있어야 하고, 이륙 후에는 고속으로 비행하는 능력이 필요하다. 기존의 헬리콥터는 수직 이착륙 능력을 갖고 있으나 고속비행이 불가능하며, 프로펠러 항공기나 제트기는 고속비행 능력을 갖고 있으나 수직 이착륙이 불가능하다.
비행체가 헬리콥터의 수직 이착륙 능력과 제트기의 고속비행 능력을 함께 갖출 수는 없을까. 두가지 능력을 겸비한 신개념 비행체는 어떤 모습일까.
고정날개 vs 회전날개
먼저 기존 항공기의 장단점을 살펴보자. 고정익 항공기는 1903년 미국의 라이트 형제가 엔진 동력으로 이륙시킨 이래 급속도로 발전했다. 이미 1910년대 말에는 제1차 세계대전에서 군용으로 사용되기도 했다. 고정익 항공기는 연료 효율이 높고 유지비가 적게 들어 지금까지도 실용 항공기의 대부분을 차지하고 있다. 고정익 항공기는 날개로 항공기 무게만큼의 양력을 발생시키기 위해 지상에서 수백m를 활주할 필요가 있다. 때문에 활주로가 있는 한정된 장소에서만 비행기를 운용할 수 있다. 일단 공중에 뜨면 일정한 속도 이상으로 항상 비행해야 항공기 무게 이상의 양력이 발생하고 항공기는 계속 공중에 떠있을 수 있다. 제자리 비행(공중정지 비행)이 불가능하다는 말이다.
고정익 항공기의 이런 문제를 해결하기 위해 헬리콥터와 같은 회전익 항공기가 등장했다. 흥미롭게도 회전익 항공기의 개념은 일찍이 15세기 말 레오나르도 다빈치에 의해 제안됐다. 하지만 회전익 항공기는 그 후 긴 시간이 흘러 1950년대 한국전쟁에 와서야 실용화됐다. 회전날개도 고정날개와 같이 날개 주위에 일정속도 이상의 공기가 흐르도록 날개를 회전시켜야 양력이 발생한다. 물론 큰 차이가 있다. 고정날개는 동체에 고정돼 있으므로 이륙에 필요한 속도를 만들기 위해 활주가 필요한 반면, 회전날개는 동체 위에 부착된 채 회전하므로 동체의 활주가 필요 없다. 즉 회전익 항공기는 제자리에서 이륙할 수 있다. 또한 회전익 항공기의 경우 제자리에서 날개가 회전해 양력이 발생하기 때문에 공중정지 비행이 가능하다.
회전익 항공기는 수직 이착륙과 공중정지 비행을 가능하게 만들면서 고정익 항공기의 한계를 극복했다.
오페라에서 떠오른 아이디어
그럼에도 불구하고 회전익 항공기에는 문제가 있었다. 이 문제는 회전날개의 전후좌우 위치와 날개 주위의 공기흐름속도에 밀접하게 관련된다. 날개 주위에 나타나는 공기흐름의 속도는 헬리콥터가 제자리에서 비행할 때 날개의 위치에 상관없지만, 헬리콥터가 앞으로 비행할 때는 날개의 위치에 따라 달라진다는 점이다.
날개가 공중에서 내려다봤을 때 시계반대 방향으로 돈다고 생각해보자. 이때 오른쪽에 위치한 날개는 앞으로 진행하는 전진익이 되고, 왼쪽 날개는 뒤로 움직이는 후퇴익이 된다. 전진익에는 날개의 회전속도에 항공기의 전진속도가 합쳐져 빠른 속도의 공기흐름이 나타나는 반면, 후퇴익에서는 이와 반대로 느린 속도의 흐름이 나타난다. 이런 상태에서는 공기흐름 속도가 빠른 전진익에서 더 큰 양력이 발생하기 때문에 항공기가 왼쪽으로 기울어지는 문제가 생긴다.
이같은 점은 헬리콥터를 처음 개발하던 당시에 부딪쳤던 문제다. 1920년대 초 스페인의 라 시에르바는 오토자이로라는 회전익 항공기를 개발했는데, 실제 크기로 제작하고 앞으로 나아가는 시험비행을 했을 때 왼쪽으로 쓰러지는 현상을 만났다.
하지만 나무로 만든 소형 모델로 실험했을 때는 문제가 없었다. 이상한 일이었다. 라 시에르바는 이 문제로 고민하다가 아내와 오페라를 보러 가게 됐다. 오페라가 진행되는 와중에도 그의 고민은 계속됐고 오페라가 끝날 무렵 마침내 갑작스런 영감이 떠올랐다. 실제 모델의 회전날개는 단단하게 고정된 반면, 소형 모델의 날개는 구부러질 수 있을 정도로 느슨하게 이어져 있다는 사실을 깨달았던 것이다.
라 시에르바는 실제 모델에서도 날개가 부드럽게 위아래로 움직일 수 있는 장치를 발명했다. 날개가 이어지는 부분에 경첩을 집어넣었던 것이다. 경첩이 들어간 그의 오토자이로는 회전익 항공기의 개발에 중요한 전환점이 됐다. 이후 헬리콥터에는 날개가 위아래로 움직일 수 있는 경첩이 들어갔다.
헬기의 고속비행 불가능한 이유
헬리콥터에 들어간 경첩은 항공기의 날개가 위아래로 움직이며 자세를 잡는데 중요한 역할을 했지만, 날개의 연결부위에 들어간 베어링이 문제였다. 날개가 위아래로 자주 움직이면 베어링이 많이 닳았고, 항공기에 진동과 소음이 많이 일어났다. 그래서 다른 방법이 고안됐다.
회전익 항공기가 바른 자세를 유지하며 앞으로 비행하기 위해서는 전진익과 후퇴익에 같은 양의 양력이 필요하다. 그래서 전문가들은 속도의 차이에 의한 양력의 차이를 보완하는 방법으로 날개를 비틀어 날개의 각도(피치각)를 조종하는 방법을 제안했다. 날개의 각도를 바꾸면 날개꼴(날개단면)과 여기에 불어닥치는 공기흐름의 각도(받음각)가 달라진다. 예를 들어 받음각이 커지면 날개꼴 아래위의 압력 차이가 커져 양력이 증가한다.
실제로 회전익 항공기의 경우 공기흐름이 빠른 전진익에서는 양력을 증가시킬 필요가 없으므로 날개를 낮은 각도로 유지하는 반면, 공기흐름이 느린 후퇴익에서는 양력을 증가시켜야 하므로 비교적 높은 각도로 유지해야 한다. 물론 날개가 회전하면서 전진익과 후퇴익의 역할이 바뀌므로 역할에 따라 매번 각도가 달라지도록 한다. 이를 통해 헬리콥터는 균형있는 자세를 잡으며 앞으로 전진한다. 물론 전진익과 후퇴익의 각도를 적절히 조절하면 원하는 쪽으로 방향을 바꿀 수도 있다.
이때 후퇴익의 날개 각도는 아무리 높인다 해도 대략 12° 이하로 유지해야 한다. 각도가 이보다 커지면 날개 표면에 붙어있던 공기흐름이 날개 표면에서 떨어져 나간다. 따라서 날개 표면에서의 공기흐름이 느려지고 양력도 줄어들어 항공기는 더이상 비행할 수 없게 된다. 또한 전진익 주위에서는 공기흐름이 아무리 빨라진다 해도 공기흐름속도가 음속에 가까워지면 공기 저항력이 급격히 증가한다. 때문에 회전익 항공기의 전진속도를 더이상 상승시킬 수 없다. 이런 이유로 헬리콥터의 전진속도는 빠른 경우 1백50노트(시속 2백78km) 정도다. 지금까지 세계신기록도 2백17노트(시속 4백2km)로 제한돼 있다. 고속비행이 불가능한 점은 회전익 항공기의 고질적인 한계인 셈이다.

위에서 돌다 앞에서 도는 프로펠러
회전익 항공기의 전진비행 속도가 제한된다는 문제점을 해결하려면 어떻게 해야 할까. 헬리콥터와 같이 회전날개를 이용해 수직으로 이륙한 뒤 고정익 항공기로 변신하면 어떨까. 스마트 무인기에는 이같은 새로운 비행체 개념을 도입할 예정이다.
헬리콥터처럼 수직으로 이륙해 고정날개로 전진하는 비행체로는 두가지 방식을 예로 들 수 있다.
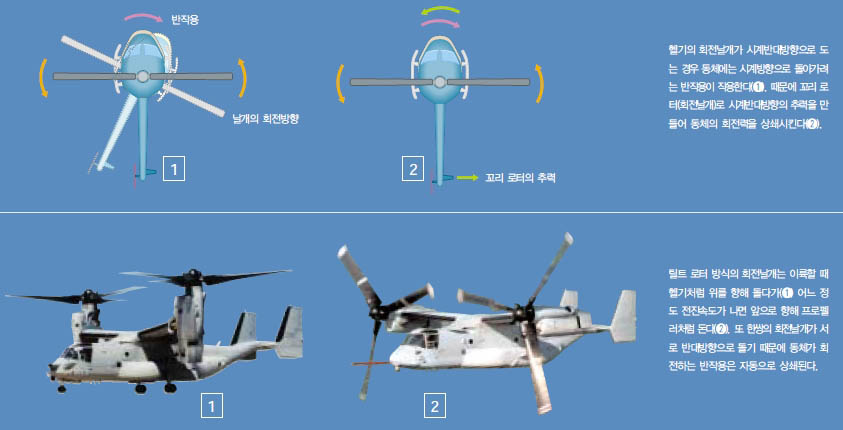
먼저 주날개 양쪽 끝에 서로 반대방향으로 도는 회전날개(로터)를 설치하는 ‘틸트 로터’(tilt rotor) 방식이 있다. 두개의 회전날개는, 헬리콥터와 같이 수직으로 이륙한 뒤 전진비행을 해 주날개로 항공기의 중량을 지탱할 수 있는 양력을 얻는데 충분한 속도에 도달할 때까지 위로 향한다. 이후에는 회전날개를 앞으로 기울여 고정익 항공기의 프로펠러와 같은 역할을 하도록 해 항공기의 전진비행속도를 증가시킨다.
틸트 로터 방식은 유인기로 이미 개발됐으며 약 3백노트의 전진비행속도를 낼 수 있다. 주인공은 1970년대 개발되기 시작한 군용기 V-22 ‘오스프레이’로 실용화를 앞두고 있다. 무인기로는 미국의 벨 헬리콥터 사가 1998년에 비행시험에 성공했는데, 이때 약 2백노트의 전진비행속도를 낸 바 있다.
틸트 로터 방식에서는 왜 회전날개(로터)가 서로 반대방향으로 도는 것일까. 우선 회전날개 하나로 구성된 보통의 헬리콥터를 살펴보자. 공중에서 회전날개가 돌 때 반작용으로 동체가 돌아가는 현상이 발생한다. 예를 들어 회전날개가 시계반대방향으로 돈다면 동체는 시계방향으로 돌아가려고 한다. 보통의 헬리콥터에서는 꼬리 로터(회전날개)로 시계반대방향의 추력을 만들어 동체의 회전을 방지한다(그림). 하지만 틸트 로터 방식에서는 양끝의 회전날개가 서로 반대방향으로 돌면서 이런 반작용을 상쇄시키는 역할을 한다. 때문에 꼬리 로터가 필요 없다.
물론 틸트 로터 방식에는 단점이 있다. 제트 엔진을 사용하기는 하지만, 고정익 제트기처럼 제트를 직접 후방으로 분사하면서 추력을 얻어 비행하는 방식이 아니다. 대신 헬리콥터처럼 프로펠러를 돌려 추력을 얻는 터보 샤프트 제트엔진을 사용하기 때문에 틸트 로터 방식의 전진속도는 3백노트 정도로 제한된다.
꼬리날개가 앞에 달리면?
틸트 로터 방식의 한계점을 극복하기 위해 하나의 제트엔진으로 수직 이착륙과 고정익 전진비행을 가능하게 만드는 새로운 비행체의 개념이 등장했다. 바로 ‘카나드 로터 윙’(CRW) 방식이다. 아직까지 유인기는 물론 무인기로도 개발된 적이 없다. 단지 미국 보잉 사에서 1988년부터 기술을 시현하기 위한 시험기를 설계·제작해 현재 비행시험을 준비중에 있다. 현재 스마트 무인기의 가장 유력한 후보 형상이다.
CRW는 카나드(Canard), 로터(Rotor), 윙(Wing)의 약어다. 회전날개(로터)를 고정날개(윙)로도 사용하고, 앞쪽에 꼬리날개와 비슷한 날개인 카나드(귀날개)가 달려있다는 뜻이다. 특히 카나드는 회전익 형태에서 고정익 형태로 비행방식을 바꿀 때 로터나 윙만으로는 양력이 부족해 고도가 떨어지는 현상을 방지하는 목적을 가진다.
CRW 방식은 어떻게 하나의 제트엔진으로 수직 이착륙과 고정익 전진비행을 할까. 우선 수직으로 이륙하는 상황을 보자. 엔진의 배기가스를 로터의 양쪽 끝으로 분사하는 ‘팁 제트’(tip jet) 방식으로 로터가 회전하도록 해 양력을 얻는다. 이때는 고정익 비행에 쓰이는 동체 후방의 노즐을 닫아 엔진 배기가스가 팁 제트로만 향하게 만든다. 헬리콥터와 같이 로터를 앞으로 기울이면 앞으로 움직이는데, 전진비행속도가 약 1백20노트에 도달하면 동체 앞부분에 있는 카나드와 후방부 꼬리날개로 항공기 무게를 지탱할 수 있는 충분한 양력을 얻는다.
이때 고정익 항공기로 변신해 전진비행을 시도한다. 구체적으로 어떻게 할까. 팁 제트로 향하던 배기 통로를 닫고 후방부 노즐을 열면 된다. 그러면 로터는 회전이 줄어들고, 정지한 후에는 고정익 항공기의 날개처럼 고정된다. CRW는 이후 제트엔진에 의한 추력으로 3백50노트 이상의 전진속도를 낼 수 있다.
CRW 방식에서는 팁 제트로 로터를 회전하기 때문에 흔히 일반적인 헬리콥터에서 동체의 반작용 회전을 방지하기 위해 사용되는 꼬리 로터가 필요없다는 장점이 있다.
또 기존의 헬리콥터에 들어가는 감속장치가 필요없다는 특징이 있다. 보통 제트엔진이 1분당 수천번 돌아야 꺼지지 않는 반면, 헬리콥터의 로터는 1분당 수백번 돌아야 음속을 넘지 않는다. 때문에 기존의 헬리콥터에는 엔진 회전수를 로터 회전수로 줄이는 감속장치가 필요하다. 하지만 CRW 방식에는 제트를 분사해 추력을 얻는 엔진이 사용되기 때문에 무거운 감속장치 대신 간단히 밸브로 로터의 회전수를 조종할 수 있다.
CRW 방식에서는 항공기의 비행 방향을 색다르게 조종한다. 물론 고속으로 비행할 때는 꼬리 부분의 방향타로 항공기의 방향을 조종한다.
하지만 저속으로 회전익 비행을 할 때는 방향타에 의한 방향조종이 불가능하다. 그래서 후방의 배기 노즐 근처에는 양옆으로 또다른 노즐이 있다. 이들 노즐을 통해 배기가스의 일부를 분사시켜 항공기의 비행 방향을 조종한다.